TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081146
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194719
出願日
2023-11-15
発明の名称
モータ装置
出願人
株式会社ミツバ
代理人
弁理士法人筒井国際特許事務所
主分類
H02K
11/01 20160101AFI20250520BHJP(電力の発電,変換,配電)
要約
【課題】回転検出精度の低下を抑制ことができるモータ装置を得る。
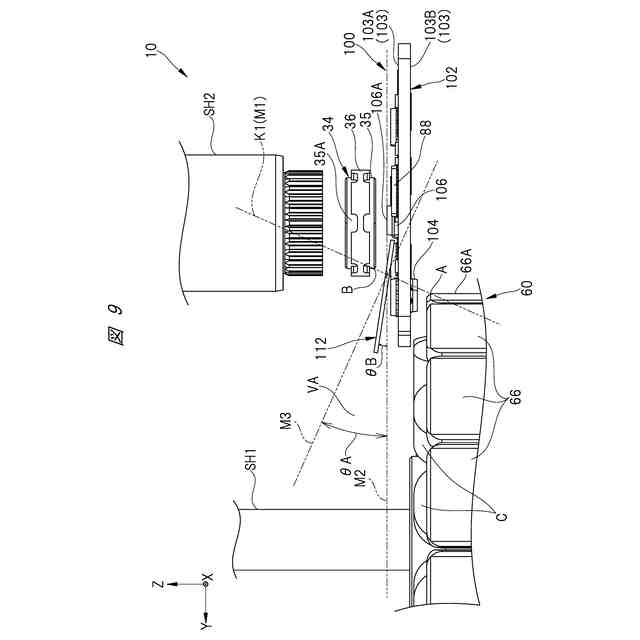
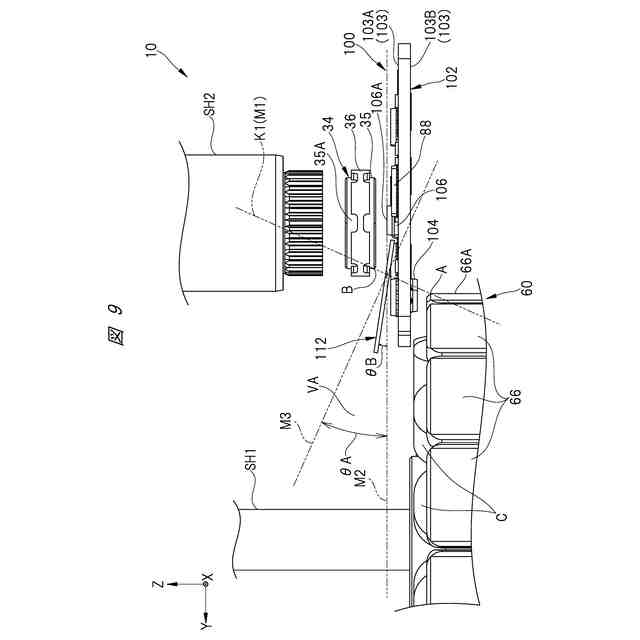
【解決手段】ワイパモータ10は、ブラシレスモータ部60と、出力軸SH2と、第1センサマグネット66と、第1センサ104と、第2センサマグネット34と、第2センサ106と、制御基板102と、シールド板112と、を備える。出力軸SH2は、回転軸SH1から伝達された回転力を受けて回転する。シールド板112は、第1センサマグネット66の最外周と第2センサマグネット34の最外周とを結び且つ長さが最短となる仮想線K1を含む面を第1仮想面M1としたとき、第1仮想面M1と交差するように位置する。さらに、シールド板112は、第1センサマグネット66と第2センサ106との間と、第2センサマグネット34と第1センサ104との間との少なくとも一方に位置する。
【選択図】図9
特許請求の範囲
【請求項1】
回転軸を有するモータ部と、
前記回転軸と平行に設けられ、前記回転軸から伝達された回転力を受けて回転する出力軸と、
前記回転軸と一体に回転する第1センサマグネットと、
前記第1センサマグネットの磁気を検出する第1センサと、
前記出力軸と一体に回転する第2センサマグネットと、
前記第2センサマグネットの磁気を検出する第2センサと、
前記第1センサ及び前記第2センサが取り付けられた制御基板と、
前記第1センサマグネットの最外周と前記第2センサマグネットの最外周とを結ぶ線のうち長さが最短である仮想線を含む面を第1仮想面としたとき、前記第1仮想面と交差するように位置し、且つ前記第1センサマグネットと前記第2センサとの間と、前記第2センサマグネットと前記第1センサとの間との少なくとも一方に位置する磁気シールドと、
を備える、モータ装置。
続きを表示(約 950 文字)
【請求項2】
前記第1センサマグネットと前記第2センサマグネットとの間で前記制御基板の実装面に沿った面を第2仮想面とし、
前記第1仮想面と直交する面を第3仮想面としたとき、
前記第2仮想面と前記第3仮想面とは交差しており、
前記磁気シールドの少なくとも一部は、前記第2仮想面と前記第3仮想面との間の仮想空間内に位置する、
請求項1に記載のモータ装置。
【請求項3】
前記磁気シールドは、前記第2仮想面と交差するように傾斜している、
請求項2に記載のモータ装置。
【請求項4】
前記磁気シールドの少なくとも一部は、前記第1センサと前記第2センサマグネットとの間に位置する、
請求項3に記載のモータ装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載のモータ装置において、
前記モータ部と前記制御基板とを電気的に接続する端子部を収容するホルダをさらに有し、
前記ホルダには、前記磁気シールドを支持する支持部が設けられている、モータ装置。
【請求項6】
前記磁気シールドは、前記ホルダと前記制御基板との間に位置している、
請求項5に記載のモータ装置。
【請求項7】
前記磁気シールドは、所定の厚さを有するシールド板であり、
前記支持部は、前記シールド板の厚さ方向と交差する交差方向に間隔をあけて位置する第1支持部及び第2支持部を有し、
前記第1支持部は、前記シールド板の前記交差方向の一端部を支持し、
前記第2支持部は、前記厚さ方向において前記第1支持部との距離が異なる傾斜面を備え、
前記傾斜面は、前記シールド板の前記交差方向の他端部を支持する、
請求項6に記載のモータ装置。
【請求項8】
前記シールド板には、前記第1支持部と前記第2支持部の少なくとも一方と係合する溝部が設けられている、
請求項7に記載のモータ装置。
【請求項9】
前記第1支持部及び前記第2支持部の少なくとも一方は、前記制御基板に支持される、
請求項7に記載のモータ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に記載されたモータは、センサ基板と、ロータに設けられた第1センサマグネットに対向するホールICと、ヘリカルギヤに設けられた第2センサマグネットに対向するMRセンサと、を有する。ホールICは、センサ基板の表面に実装されている。MRセンサは、センサ基板の裏面に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-018035号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のモータでは、1枚のセンサ基板の表面にホールICが実装され、当該センサ基板の裏面にMRセンサが配置されている。このため、ホールICとMRセンサが別々の基板に設けられた構成と比べて、第1センサマグネットと第2センサマグネットとの距離が近くなる。第1センサマグネットと第2センサマグネットとの距離が近い場合、ホールICに作用する磁束と、MRセンサに作用する磁束との干渉が発生する。これにより、ホールICで検出される回転軸の回転検出精度や、MRセンサで検出される出力軸の回転検出精度が低下する虞があった。つまり、モータ装置の回転検出精度が低下する虞があった。
【課題を解決するための手段】
【0005】
本発明の一態様のモータ装置は、回転軸を有するモータ部と、前記回転軸と平行に設けられ、前記回転軸から伝達された回転力を受けて回転する出力軸と、前記回転軸と一体に回転する第1センサマグネットと、前記第1センサマグネットの磁気を検出する第1センサと、前記出力軸と一体に回転する第2センサマグネットと、前記第2センサマグネットの磁気を検出する第2センサと、前記第1センサ及び前記第2センサが取り付けられた制御基板と、前記第1センサマグネットの最外周と前記第2センサマグネットの最外周とを結ぶ線のうち長さが最短である仮想線を含む面を第1仮想面としたとき、前記第1仮想面と交差するように位置し、且つ前記第1センサマグネットと前記第2センサとの間と、前記第2センサマグネットと前記第1センサとの間との少なくとも一方に位置する磁気シールドと、を備えることを特徴とする。
【発明の効果】
【0006】
本発明の一態様によれば、第1センサマグネットと第2センサマグネットが互いに近い位置にある構成であっても、第1センサマグネットから第2センサに向かう磁束や、第2センサマグネットから第1センサに向かう磁束の少なくとも一部が、磁気シールドによって遮蔽される。このため、第1センサマグネットから第1センサに向かう磁束に第2センサマグネットからの磁束が干渉することが抑制され、第2センサマグネットから第2センサに向かう磁束に第1センサマグネットからの磁束が干渉することが抑制される。これにより、第1センサにおける回転軸の回転検出の誤差と、第2センサにおける出力軸の回転検出の誤差の少なくとも一方を低減できるので、モータ装置の回転検出精度の低下を抑制することができる。
【図面の簡単な説明】
【0007】
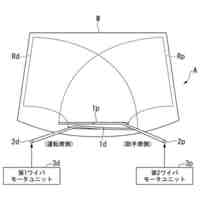
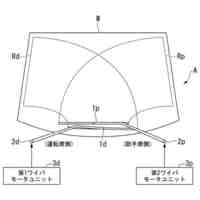
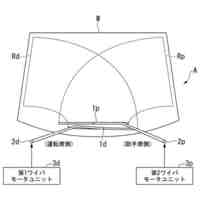
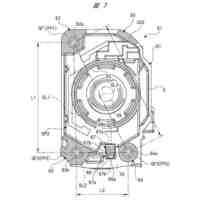
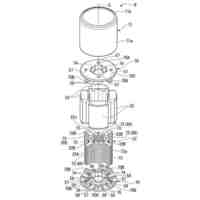
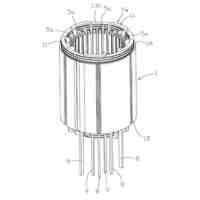
第1実施形態に係るワイパモータの斜視図である。
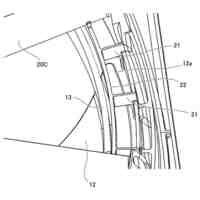
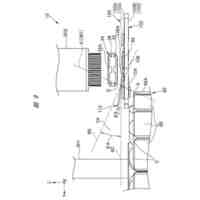
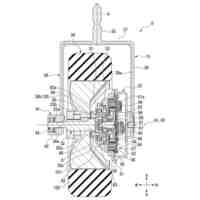
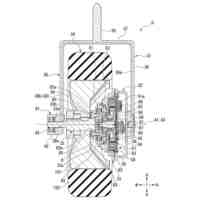
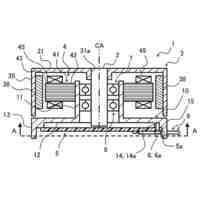
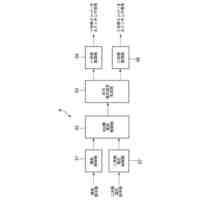
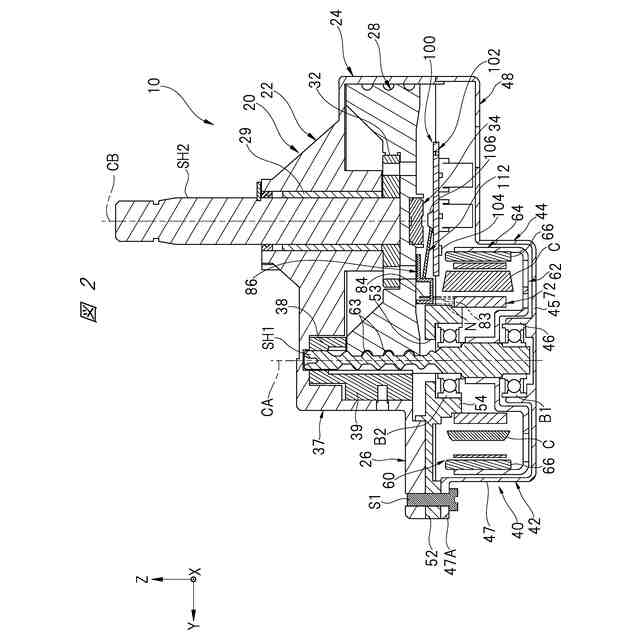
図1のA-A線に沿う断面図である。
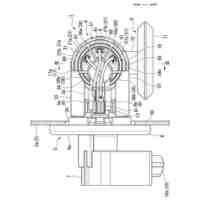
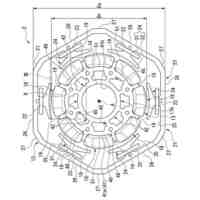
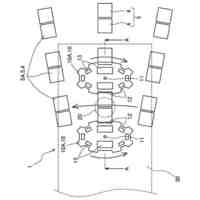
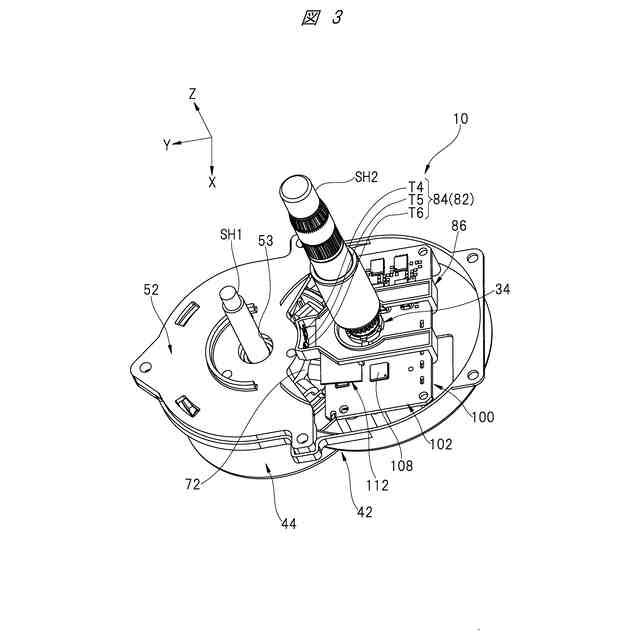
図1のワイパモータのギヤハウジングを取り除いた状態を示す斜視図である。
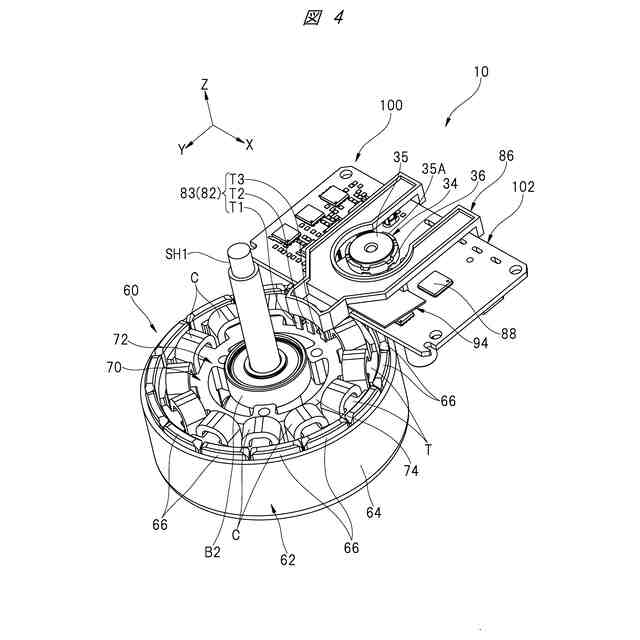
図1のワイパモータの回転軸側の構造、端子ホルダ、制御基板及びシールド板を示す斜視図である。
図1のワイパモータの第1センサ及び第2センサと、シールド板との配置関係を示す説明図である。
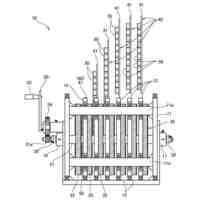
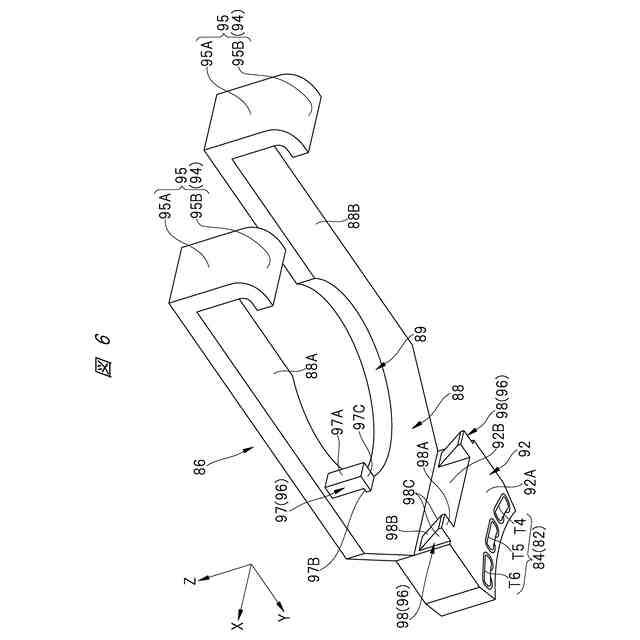
図1のワイパモータの端子ホルダを斜め下方から見た斜視図である。
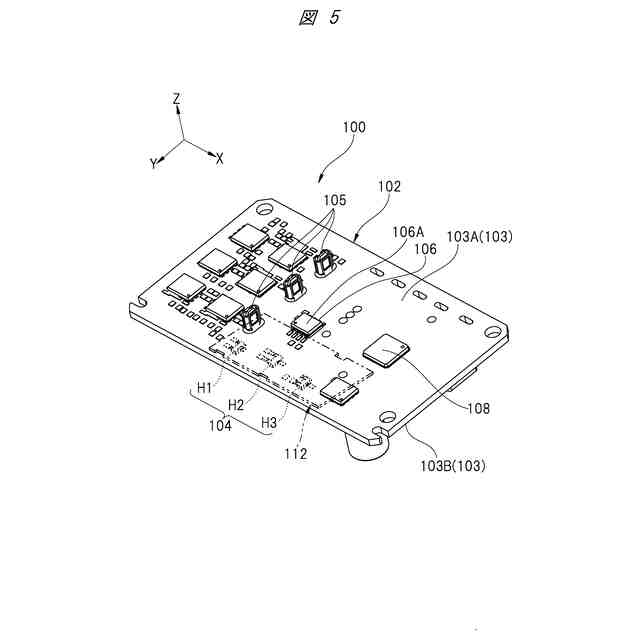
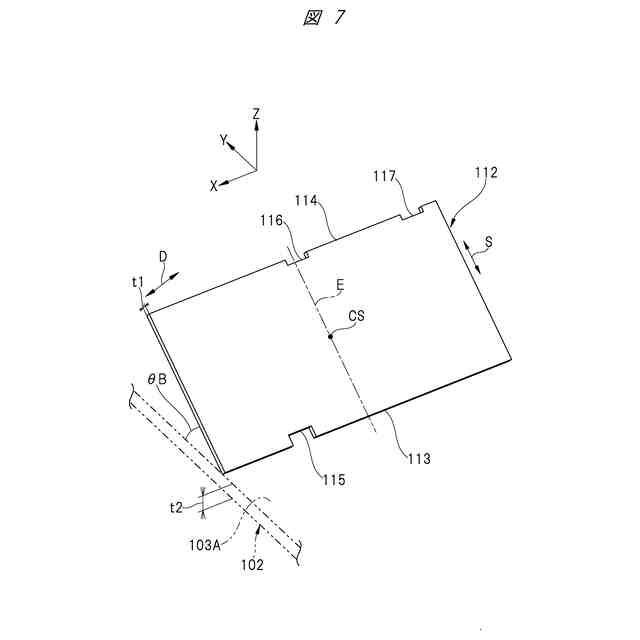
図1のワイパモータのシールド板を示す斜視図である。
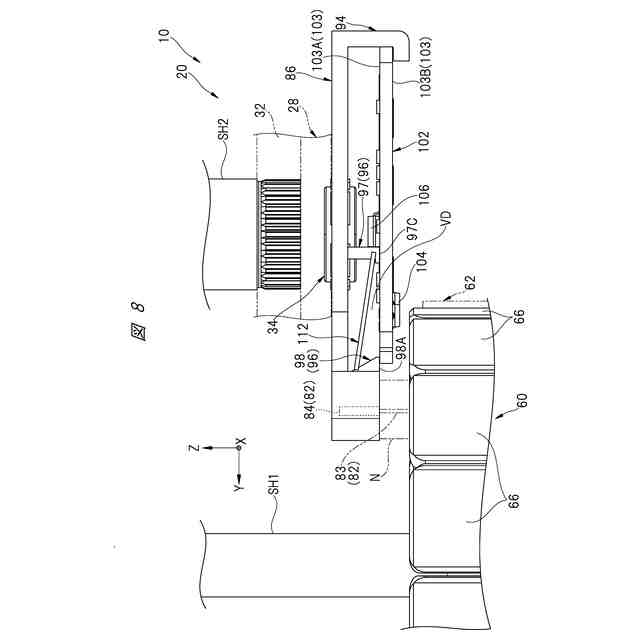
図1のワイパモータのシールド板が端子ホルダに支持された状態を示す説明図である。
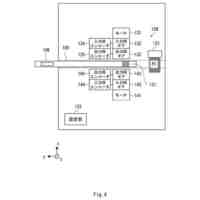
図1のワイパモータの制御基板、第1センサ、第2センサ、第1センサマグネット、第2センサマグネット及びシールド板の配置関係を示す説明図である。
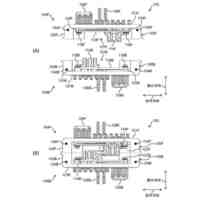
図1のワイパモータにおいて、第1センサマグネットと第2センサマグネットとの間に生じる磁束線をシールド板で遮る状態を示す説明図である。
第2実施形態に係るワイパモータにおいて、第1センサマグネットと第2センサマグネットとの間に生じる磁束線をシールド板で遮る状態を示す説明図である。
【発明を実施するための形態】
【0008】
以下、実施形態の例として、第1、第2実施形態及び変形例について図面を参照しながら説明する。なお、実施形態を説明するための全ての図面において、同一又は実質的に同一の構成や要素には同一の符号を用いる。また、一度説明した構成や要素については、原則として繰り返しの説明は行わない。
【0009】
図1から図11までにおいては、各構成要素の一部が拡大されて示されている場合や、一部の構成要素が省略されている場合がある。以下の説明では、特に言及がない場合、「第1」、「第2」等の用語は、構成要素を互いに区別するために使用されているだけであり、特定の順位や順番を表すものではない。
【0010】
〔第1実施形態〕
第1実施形態に係るモータ装置は、自動車等の車両の前方に搭載される不図示のワイパ装置の駆動源となるワイパモータ10である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ミツバ
払拭装置
2日前
株式会社ミツバ
払拭装置
22日前
株式会社ミツバ
払拭装置
23日前
株式会社ミツバ
払拭装置
23日前
株式会社ミツバ
払拭装置
23日前
株式会社ミツバ
払拭装置
6日前
株式会社ミツバ
シュラウド
1か月前
株式会社ミツバ
モータ装置
1か月前
株式会社ミツバ
モータ装置
2か月前
株式会社ミツバ
燃料供給装置
1か月前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
駆動車輪及び電動アシスト車
5日前
株式会社ミツバ
モータ制御装置、モータシステム、及び電動車両
20日前
株式会社ミツバ
電動アシスト車の走行操作装置、及び、その制御方法
5日前
株式会社ミツバ
ロータ
1か月前
ニデック株式会社
モータ
6日前
個人
恒久電源開発の装置
1か月前
個人
発電装置
今日
個人
ステッピングモータ実習装置
13日前
キヤノン株式会社
電源装置
27日前
キヤノン株式会社
電源装置
今日
株式会社竹中工務店
避雷設備
27日前
サンデン株式会社
電力変換装置
7日前
ダイハツ工業株式会社
溶接装置
1か月前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
充電方法
20日前
トヨタ自動車株式会社
充電装置
1か月前
サンデン株式会社
電力変換装置
7日前
北勢工業株式会社
保護管
1か月前
愛知電機株式会社
ステータおよびモータ
1か月前
ダイハツ工業株式会社
ロータ構造
1か月前
愛知電機株式会社
ステータおよびモータ
1か月前
株式会社ダイヘン
充電装置
1か月前
サンデン株式会社
モータ制御装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ