TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109262
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024002988
出願日
2024-01-12
発明の名称
電動アシスト車の走行操作装置、及び、その制御方法
出願人
株式会社ミツバ
代理人
個人
,
個人
,
個人
主分類
B62D
11/04 20060101AFI20250717BHJP(鉄道以外の路面車両)
要約
【課題】操作者による操作性をより良好なものにすることができる電動アシスト車の走行操作装置、及び、その制御方法を提供する。
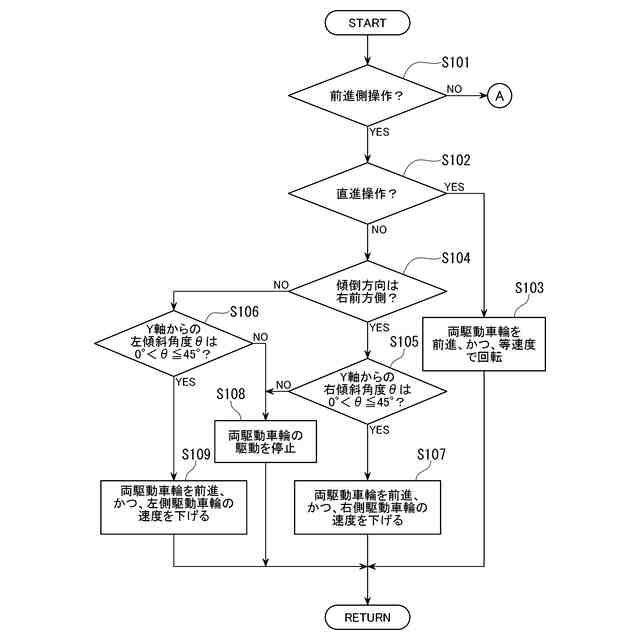
【解決手段】走行操作装置は操作入力機器と制御部を備える。操作入力機器は操作子を有する。制御部は、操作子の傾倒方向に応じて電動車輪の回転方向、及び回転速度差等を制御する。制御部は操作子の傾倒方向に応じた方向に電動車輪を回転させる。操作子が車体前後方向に対応する第2座標軸に沿って傾倒操作された場合には、一側と他側の各電動車輪を等速度で回転させる。操作子が第2座標軸から所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側に位置される電動車輪の回転速度が相対的に遅くなるように各電動車輪を回転させる。操作子が前記座標軸から所定角度を越えて周方向にずれた位置で傾倒操作される場合には、各電動車輪の回転指令をキャンセルする。
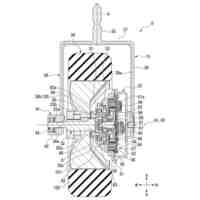
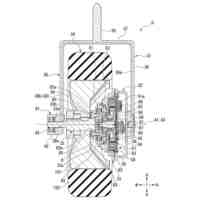
【選択図】図4
特許請求の範囲
【請求項1】
車体と、
前記車体の車幅方向の一側と他側に少なくとも一つずつ配置された電動車輪と、
前記電動車輪と車体前後方向に離間して前記車体に配置された少なくとも一つの従動車輪と、を備えた電動アシスト車の走行操作装置であって、
傾動中心を中心として周囲の任意の方向に傾倒可能な操作子を有する操作入力機器と、
前記操作子の傾倒方向に応じて、車幅方向の一側の前記電動車輪と車幅方向の他側の前記電動車輪の回転方向、及び回転速度差を制御する制御部と、を備え、
前記操作子に関し、前記傾動中心を原点とし、車幅方向に対応する第1座標軸と車体前後方向に対応する第2座標軸を持つ直交座標系を定義したときに、
前記制御部は、
前記操作子の傾倒方向が前記第1座標軸を基準に車体前方側であるか車体後方側であるかに応じて各前記電動車輪の回転方向を決定し、
前記操作子が前記第2座標軸に沿って傾倒操作された場合には、前記一側の前記電動車輪と前記他側の前記電動車輪を等速度で回転させる指令を各前記電動車輪に出力し、
前記操作子が前記原点回りに第2座標軸から所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側に位置される前記電動車輪の回転速度が逆側に位置される前記電動車輪の回転速度に対して相対的に遅くなる回転指令を各前記電動車輪に出力し、
前記操作子が前記原点回りに前記第2座標軸から前記所定角度を越えて周方向にずれた位置で傾倒操作された場合には、各前記電動車輪を回転させる指令をキャンセルすることを特徴とする電動アシスト車の走行操作装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記操作子が前記原点回りに前記第2座標軸から前記所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側に位置される前記電動車輪の回転速度が逆側に位置される前記電動車輪の回転速度に対し、周方向のずれ角度に応じた度合いで相対的に遅くなるように各前記電動車輪の回転を制御することを特徴とする請求項1に記載の電動アシスト車の走行操作装置。
【請求項3】
前記従動車輪は、略鉛直方向を向く軸回りに回転可能に支持された自在輪であり、
前記電動車輪と前記従動車輪の間の離間距離は、車幅方向の一側の前記電動車輪と車幅方向の他側の前記電動車輪の間の離間距離よりも長いことを特徴とする請求項2に記載の電動アシスト車の走行操作装置。
【請求項4】
前記電動車輪と前記従動車輪は、車体の前後と車幅方向外側の四隅の近傍に夫々一つずつ配置されていることを特徴とする請求項3に記載の電動アシスト車の走行操作装置。
【請求項5】
前記所定角度は、
前記操作子が前記第1座標軸を基準に車体前方側に操作される場合には、前記第1座標軸に対して前記原点を中心として車体前方側に45°ずれる角度であり、
前記操作子が前記第1座標軸を基準に車体後方側に操作される場合には、前記第1座標軸に対して前記原点を中心として車体後方側に45°ずれる角度であることを特徴とする請求項4に記載の電動アシスト車の走行操作装置。
【請求項6】
前記操作子は、押し込み操作可能とされ、
前記制御部は、前記操作子が押し込み操作されたときに、前記電動車輪の出力を段階的に切り換えることを特徴とする請求項1に記載の電動アシスト車の走行操作装置。
【請求項7】
前記車体には、当該車体を進行方向に人力で引き押し操作するための把持部が設けられ、
前記操作入力機器は、前記把持部に設けられていることを特徴とする請求項1に記載の電動アシスト車の走行操作装置。
【請求項8】
請求項1に記載の電動アシスト車の走行操作装置の制御方法であって、
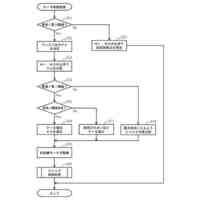
前記操作子の傾倒方向を判断するステップと、
前記ステップの判断結果に応じて、前記電動車輪の回転方向と、前記一側の前記電動車輪と前記他側の前記電動車輪の回転速度差と、前記電動車輪の出力のオン・オフとを制御するステップと、
を有することを特徴とする電動アシスト車の走行操作装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動アシスト車の走行操作装置、及び、その制御方法に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来から、台車の下部に駆動用の電動車輪を設けた電動アシスト車が知られている(例えば、特許文献1参照)。
【0003】
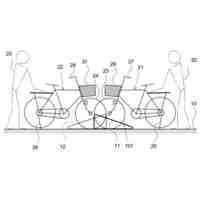
特許文献1に記載の電動アシスト車は、車体の前部の車幅方向の一側と他側に電動車輪が設置され、車体の後部の車幅方向の一側と他側に従動車輪が設置されている。また、車体の後部の上方には操作ボックスが配置され、操作ボックスには、電動アシスト車を操作する操作者が把持するための略U字状の操作ハンドルが設けられている。操作ハンドルの左右の付根部には、トルクセンサが設けられており、操作者からの入力荷重がトルクセンサによって検出される。左右の各トルクセンサによる検出結果(検出信号)はコントローラに入力され、コントローラは、左右の各トルクセンサで検出された検出値に応じたアシスト力を発生するように左右の各電動車輪に指令を出力する。
【0004】
この電動アシスト車の場合、操作者による操作ハンドルの押し引き操作に応じたアシスト力を左右の電動車輪で発生するため、操作者による直進操作や旋回操作を左右の電動車輪によってアシストすることができる。このため、操作者は電動アシスト車に対して比較的小さな押し引き操作力を付与するだけで、電動アシスト車を所望の方向に操作することができる。
【先行技術文献】
【特許文献】
【0005】
特開2013-193484号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の電動アシスト車は、操作者が操作ハンドルに加える操作荷重に応じたトルクを左右のトルクセンサによって検出し、左右のトルクセンサによる検出結果に応じたアシスト力を左右の電動車輪が発生する。このため、操作者は両手で操作ハンドルをしっかりと持ち、操作者の操作意思が反映されるように操作ハンドル(左右のトルクセンサ)に慎重に荷重を付与する必要がある。このため、特許文献1に記載の電動アシスト車の場合、走行操作装置の使い勝手が良好とは言えず、より操作性の良い走行操作装置の案出が望まれている。
【0007】
そこで本発明は、操作者による操作性をより良好なものにすることができる電動アシスト車の走行操作装置、及び、その制御方法を提供しようとするものである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る電動アシスト車の走行操作装置は、以下の構成を採用した。
即ち、本発明の第1態様に係る電動アシスト車の走行操作装置は、車体と、前記車体の車幅方向の一側と他側に少なくとも一つずつ配置された電動車輪と、前記電動車輪と車体前後方向に離間して前記車体に配置された少なくとも一つの従動車輪と、を備えた電動アシスト車の走行操作装置であって、傾動中心を中心として周囲の任意の方向に傾倒可能な操作子を有する操作入力機器と、前記操作子の傾倒方向に応じて、車幅方向の一側の前記電動車輪と車幅方向の他側の前記電動車輪の回転方向、及び回転速度差を制御する制御部と、を備え、前記操作子に関し、前記傾動中心を原点とし、車幅方向に対応する第1座標軸と車体前後方向に対応する第2座標軸を持つ直交座標系を定義したときに、前記制御部は、前記操作子の傾倒方向が前記第1座標軸を基準に車体前方側であるか車体後方側であるかに応じて各前記電動車輪の回転方向を決定し、前記操作子が前記第2座標軸に沿って傾倒操作された場合には、前記一側の前記電動車輪と前記他側の前記電動車輪を等速度で回転させる指令を各前記電動車輪に出力し、前記操作子が前記原点回りに第2座標軸から所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側に位置される前記電動車輪の回転速度が逆側に位置される前記電動車輪の回転速度に対して相対的に遅くなる回転指令を各前記電動車輪に出力し、前記操作子が前記原点回りに前記第2座標軸から前記所定角度を越えて周方向にずれた位置で傾倒操作された場合には、各前記電動車輪を回転させる指令をキャンセルすることを特徴とする。
【0009】
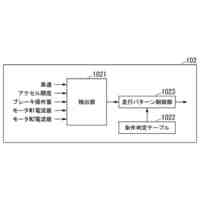
この走行操作装置の場合、操作入力機器の操作子が傾倒操作されると、その操作子の傾倒方向に応じて制御部が車幅方向の一側と他側の電動車輪の回転方向と、回転速度差と、オン・オフ状態と、を制御する。
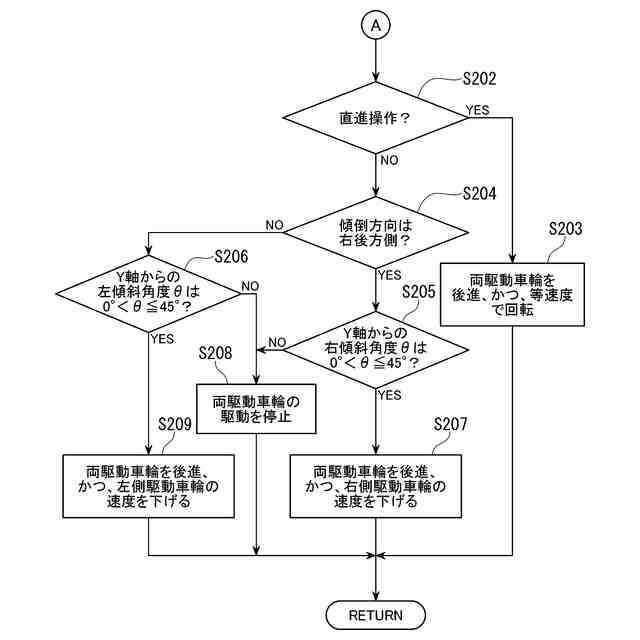
即ち、基本的に、操作子が車体前方側に操作されると、各電動車輪が車体を前進させる方向に回転駆動され、操作子が車体後方側に操作されると、各電動車輪が車体を後進させる方向に回転駆動される。
このとき、操作子が第2座標軸に沿って操作された場合には、車幅方向の一側と他側の電動車輪が等速度で駆動される。車体は、これにより前方または後方に直進する。
一方、操作子が、原点回りに第2座標軸から所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側の電動車輪が逆側の電動車輪よりも相対的に遅い回転速度で駆動される。車体は、これにより操作子の傾倒方向に旋回する。
また、このとき、操作子が、原点回りに第2座標軸から所定角度を越えて周方向にずれた位置で傾倒操作された場合には、両側の電動車輪の駆動がキャンセルされる。これにより、電動車輪によるアシストは停止する。
【0010】
本発明の第2態様は、第1態様の電動アシスト車の走行操作装置において、前記制御部は、前記操作子が前記原点回りに前記第2座標軸から前記所定角度の範囲内で周方向にずれた位置で傾倒操作された場合には、ずれ側に位置される前記電動車輪の回転速度が逆側に位置される前記電動車輪の回転速度に対し、周方向のずれ角度に応じた度合いで相対的に遅くなるように各前記電動車輪の回転を制御することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
モータ
9日前
株式会社ミツバ
払拭装置
1か月前
株式会社ミツバ
払拭装置
1か月前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
モータ装置
11日前
株式会社ミツバ
ワイパアーム
1か月前
株式会社ミツバ
車両用灯火装置
21日前
株式会社ミツバ
非容積型ポンプ
1日前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
電動車両及びハブモータ
1か月前
株式会社ミツバ
駆動車輪及び電動アシスト車
1か月前
株式会社ミツバ
モータシステム及び電動アシスト車両
1か月前
株式会社ミツバ
モータの制御装置、及び、その制御方法
1か月前
株式会社ミツバ
マグネットホルダ及び電動モータ用ロータ
18日前
株式会社ミツバ
電動アシスト車の走行操作装置、及び、その制御方法
1か月前
株式会社ミツバ
鞍乗型電動車両の制御システム、及び鞍乗型電動車両の制御方法
9日前
個人
カート
2か月前
個人
走行装置
2か月前
個人
乗り物
4か月前
個人
電動走行車両
2か月前
個人
発音装置
6か月前
個人
駐輪設備
15日前
個人
折り畳み自転車
9か月前
個人
閂式ハンドル錠
2か月前
個人
電動モビリティ
6か月前
個人
自転車用傘捕捉具
10か月前
個人
ボギー・フレーム
1か月前
個人
自由方向乗車自転車
6か月前
個人
体重掛けリフト台車
10か月前
個人
“zen-go.”
1か月前
個人
ルーフ付きトライク
22日前
個人
ルーフ付きトライク
1か月前
個人
キャンピングトライク
7か月前
個人
アタッチメント
10か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ