TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112983
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007578
出願日
2024-01-22
発明の名称
モータシステム及び電動アシスト車両
出願人
株式会社ミツバ
代理人
弁理士法人武和国際特許事務所
主分類
B62M
6/45 20100101AFI20250725BHJP(鉄道以外の路面車両)
要約
【課題】第1モータ及び第2モータにアシスト出力を適切に分配可能なモータシステムを提供する。
【解決手段】モータシステムは、第1車輪と、第2車輪と、第2車輪を駆動する人力出力が入力される入力部とを備える人力駆動車両の駆動をアシストする。モータシステムは、第1車輪を駆動する第1モータと、第2車輪を駆動する第2モータと、第1モータ及び第2モータの出力を調整するモータ制御装置とを備える。モータ制御装置は、人力出力の大きさに基づいて、モータシステムのアシスト出力を決定し、第1車輪に負荷される第1荷重と、第2車輪に負荷される第2荷重とに基づいて、アシスト出力を第1モータ及び第2モータに分配する。
【選択図】図3
特許請求の範囲
【請求項1】
第1車輪と、第2車輪と、前記第2車輪を駆動する人力出力が入力される入力部とを備える人力駆動車両の駆動をアシストするモータシステムにおいて、
前記第1車輪を駆動する第1モータと、
前記第2車輪を駆動する第2モータと、
前記第1モータ及び前記第2モータの出力を調整するモータ制御装置とを備え、
前記モータ制御装置は、
前記人力出力の大きさに基づいて、前記モータシステムのアシスト出力を決定し、
前記第1車輪に負荷される第1荷重と、前記第2車輪に負荷される第2荷重とに基づいて、前記アシスト出力を前記第1モータ及び前記第2モータに分配することを特徴とするモータシステム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載のモータシステムにおいて、
前記人力出力をPH、前記アシスト出力をPA、前記第1荷重をW1、前記第2荷重をW2、前記第1モータの第1出力をP1、前記第2モータの第2出力をP2とすると、
前記モータ制御装置は、前記アシスト出力を、式1及び式2を満たすように、前記第1出力及び前記第2出力に分配することを特徴とするモータシステム。
P1:(PH+P2)=W1:W2 ・・・(式1)
PA=P1+P2 ・・・(式2)
【請求項3】
請求項2に記載のモータシステムにおいて、
前記モータ制御装置は、
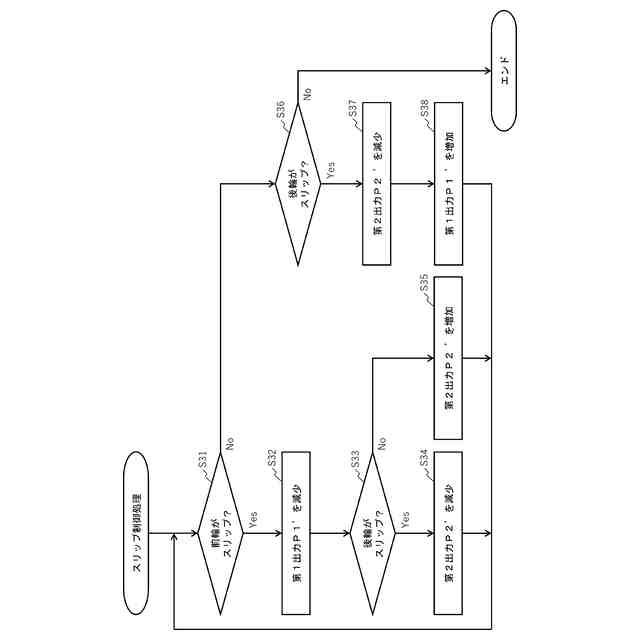
前記第1車輪がスリップする場合に前記第1出力を減少させ、
前記第2車輪がスリップする場合に前記第2出力を減少させることを特徴とするモータシステム。
【請求項4】
請求項3に記載のモータシステムにおいて、
前記モータ制御装置は、前記第1車輪及び前記第2車輪の一方がスリップし且つ他方がスリップしていない場合に、前記第1出力及び前記第2出力の一方を減少させ、前記第1出力及び前記第2出力の他方を増加させることを特徴とするモータシステム。
【請求項5】
請求項2に記載のモータシステムにおいて、
前記第1車輪は、操舵可能な前輪であり、
前記第2車輪は、後輪であり、
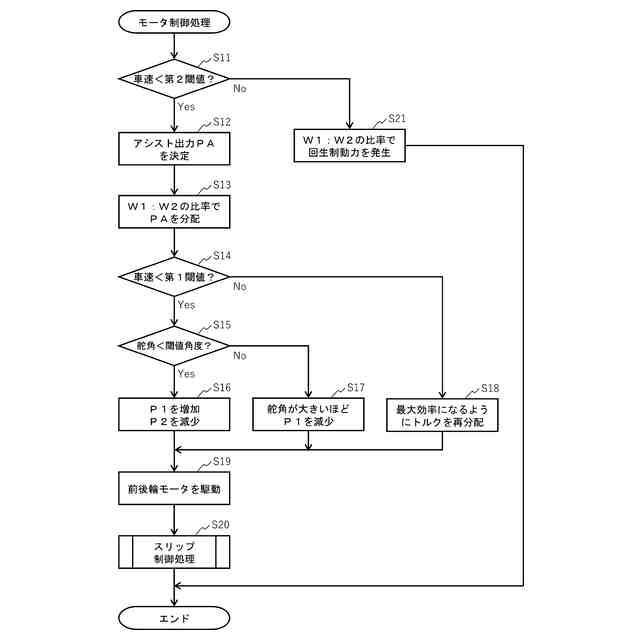
前記モータ制御装置は、前記人力駆動車両の速度が第1閾値未満の間、前記第1出力を増加させ且つ前記第2出力を減少させることを特徴とするモータシステム。
【請求項6】
請求項5に記載のモータシステムにおいて、
前記モータ制御装置は、前記人力駆動車両の速度が前記第1閾値未満の間、前記第1車輪の舵角が閾値角度以上の場合に、前記第1出力を減少させることを特徴とするモータシステム。
【請求項7】
請求項2に記載のモータシステムにおいて、
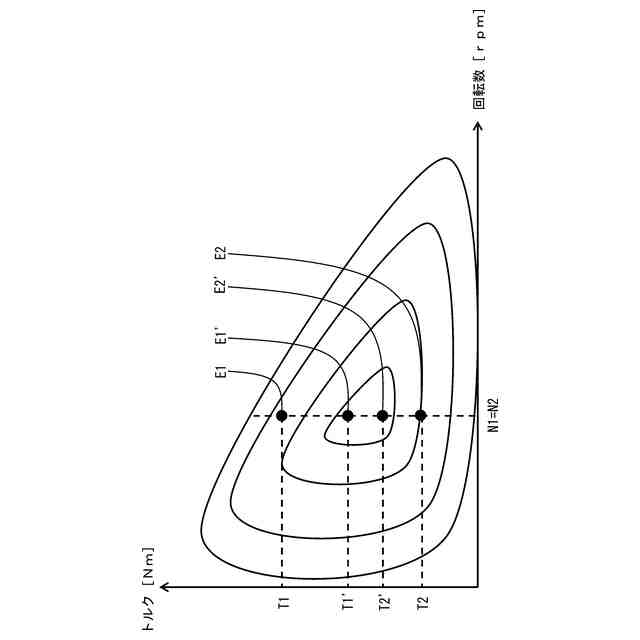
前記モータ制御装置は、前記第1出力で前記第1モータを駆動したときの第1トルクと、前記第2出力で前記第2モータを駆動したときの第2トルクとの合計トルクを、予め定められたモータ特性マップに基づいて、エネルギー効率が最大になるように前記第1モータ及び前記第2モータに再分配することを特徴とするモータシステム。
【請求項8】
請求項1に記載のモータシステムにおいて、
前記モータ制御装置は、前記人力駆動車両の速度が第2閾値以上である場合に、前記第1荷重及び前記第2荷重に基づいて、前記第1モータ及び前記第2モータに回生制動力を発生させることを特徴とするモータシステム。
【請求項9】
請求項8に記載のモータシステムにおいて、
前記モータ制御装置は、前記人力駆動車両の速度と前記第2閾値との差が大きいほど、前記回生制動力を大きくすることを特徴とするモータシステム。
【請求項10】
請求項1に記載のモータシステムにおいて、
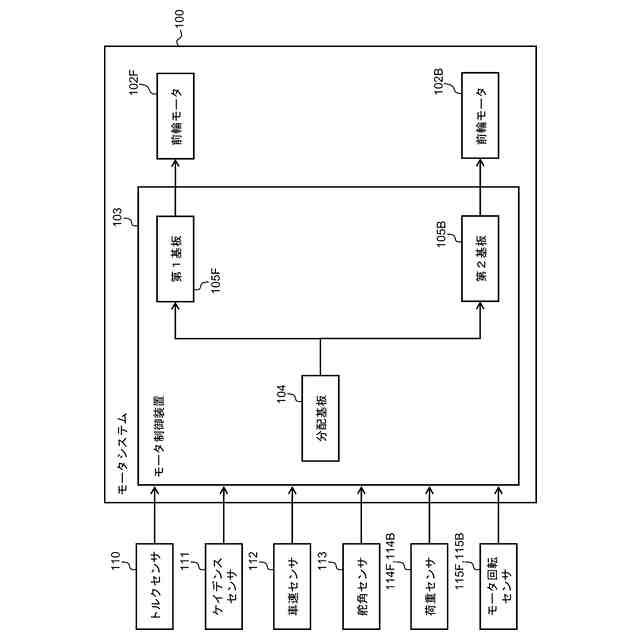
前記モータ制御装置は、
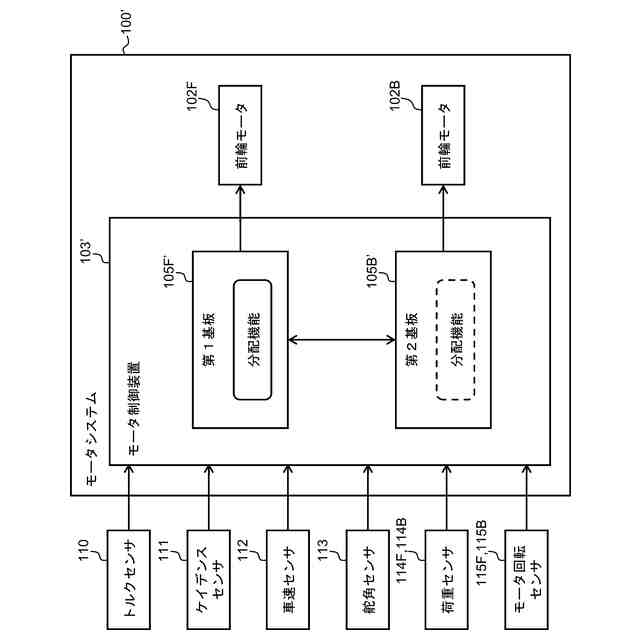
前記アシスト出力を第1出力及び第2出力に分配する分配基板と、
前記分配基板によって分配された前記第1出力で前記第1モータを駆動する第1基板と、
前記分配基板によって分配された前記第2出力で前記第2モータを駆動する第2基板とを含むことを特徴とするモータシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータシステム及び電動アシスト車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、持続可能な開発目標(Sustainable Development Goals、持続可能な開発のための2030アジェンダ、平成27(2015)年9月25日国連サミット採択、以下「SDGs」という)の推進に向けた取り組みが行われている。それに伴い、持続可能な生産消費形態の確保などのため、廃棄物や不良品の削減などを目指す技術が知られている。
【0003】
従来より、前輪を駆動する前輪モータと、後輪を駆動する後輪モータとを備える電動アシスト自転車が知られている。そして、特許文献1には、このような電動アシスト自転車において、予め定められたアシスト出力を前輪モータ及び後輪モータに分配する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7345110号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前輪モータ及び後輪モータにアシスト出力を単純比率で分配すると、前輪または後輪にスリップが発生して、電動アシスト自転車の推進力が低下するという課題がある。
【0006】
そこで、本発明の目的は、第1モータ及び第2モータにアシスト出力を適切に分配可能なモータシステムを提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明は、第1車輪と、第2車輪と、前記第2車輪を駆動する人力出力が入力される入力部とを備える人力駆動車両の駆動をアシストするモータシステムにおいて、前記第1車輪を駆動する第1モータと、前記第2車輪を駆動する第2モータと、前記第1モータ及び前記第2モータの出力を調整するモータ制御装置とを備え、前記モータ制御装置は、前記人力出力の大きさに基づいて、前記モータシステムのアシスト出力を決定し、前記第1車輪に負荷される第1荷重と、前記第2車輪に負荷される第2荷重とに基づいて、前記アシスト出力を前記第1モータ及び前記第2モータに分配することを特徴とする。
【発明の効果】
【0008】
本発明によれば、第1モータ及び第2モータにアシスト出力を適切に分配可能なモータシステムを得ることができる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
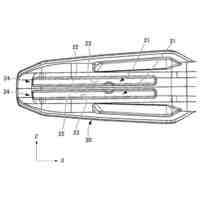
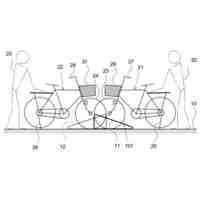
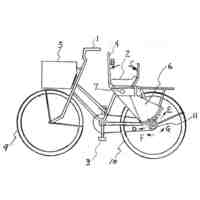
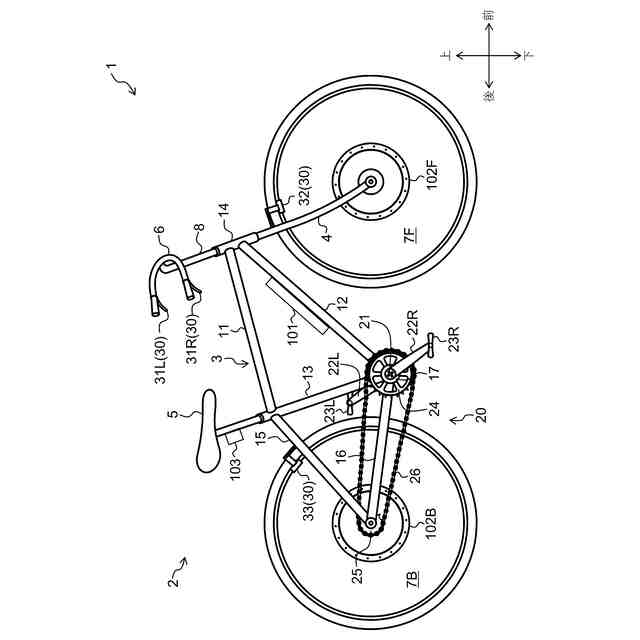
本実施形態に係る電動アシスト自転車の側面図である。
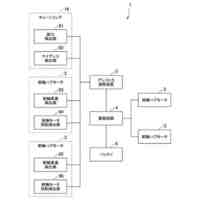
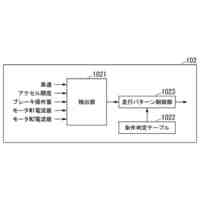
本実施形態に係るモータシステムのブロック図である。
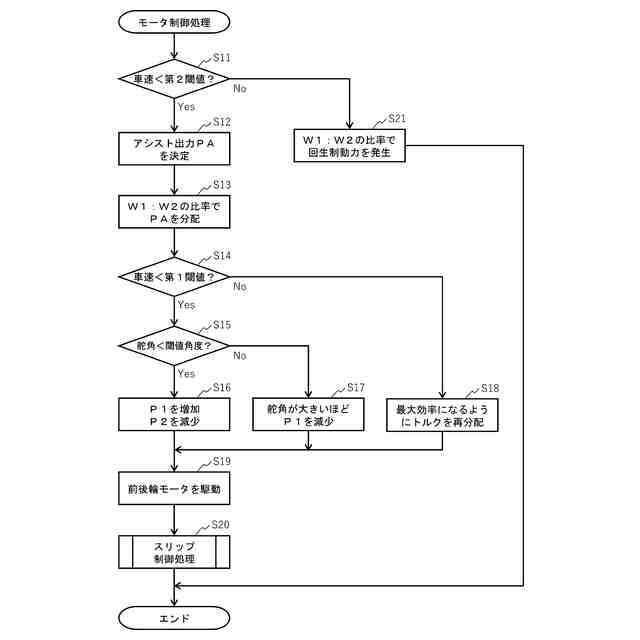
モータ制御処理のフローチャートである。
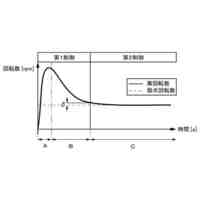
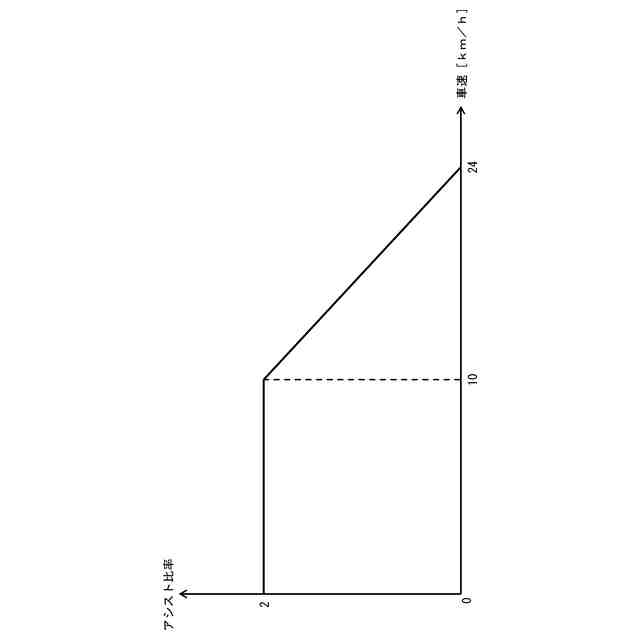
車速及びアシスト比率の関係の例を示す図である。
モータ効率マップの例を示す図である。
スリップ制御処理のフローチャートである。
変形例に係るモータシステムのブロック図である。
【発明を実施するための形態】
【0010】
[電動アシスト自転車1の構成]
図1は、本実施形態に係る電動アシスト自転車1の側面図である。図2は、本実施形態に係るモータシステム100のブロック図である。以下、電動アシスト自転車1が水平面上に載置されていることを前提として、載置面に直交する方向を「上下方向」と表記し、電動アシスト自転車1の進行方向を含む方向を「前後方向」と表記し、上下方向及び前後方向に直交する方向を「左右方向」と表記する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミツバ
モータ
10日前
株式会社ミツバ
モータ装置
12日前
株式会社ミツバ
ワイパ装置
1か月前
株式会社ミツバ
非容積型ポンプ
2日前
株式会社ミツバ
車両用灯火装置
22日前
株式会社ミツバ
ブラシレスモータ
1か月前
株式会社ミツバ
電動車両及びハブモータ
1か月前
株式会社ミツバ
モータの制御装置、及び、その制御方法
1か月前
株式会社ミツバ
マグネットホルダ及び電動モータ用ロータ
19日前
株式会社ミツバ
鞍乗型電動車両の制御システム、及び鞍乗型電動車両の制御方法
10日前
個人
カート
2か月前
個人
走行装置
2か月前
個人
電動走行車両
2か月前
個人
乗り物
4か月前
個人
電動モビリティ
6か月前
個人
閂式ハンドル錠
2か月前
個人
発音装置
6か月前
個人
駐輪設備
16日前
個人
折り畳み自転車
9か月前
個人
自転車用傘捕捉具
10か月前
個人
ボギー・フレーム
1か月前
個人
ルーフ付きトライク
1か月前
個人
ルーフ付きトライク
23日前
個人
体重掛けリフト台車
10か月前
個人
自由方向乗車自転車
6か月前
個人
“zen-go.”
1か月前
個人
パワーアシスト自転車
1か月前
個人
キャンピングトライク
7か月前
個人
自転車用荷物台
10か月前
個人
アタッチメント
10か月前
株式会社CPM
駐輪機
11か月前
個人
ステアリングの操向部材
8か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社三五
リアサブフレーム
9か月前
個人
フロントフットブレーキ。
3か月前
ヤマハ発動機株式会社
車両
11か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ