TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081129
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194685
出願日
2023-11-15
発明の名称
人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラム
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62J
45/00 20200101AFI20250520BHJP(鉄道以外の路面車両)
要約
【課題】ライダ個々に合わせた自動制御をより最適化する人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラムを提供する。
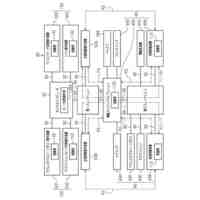
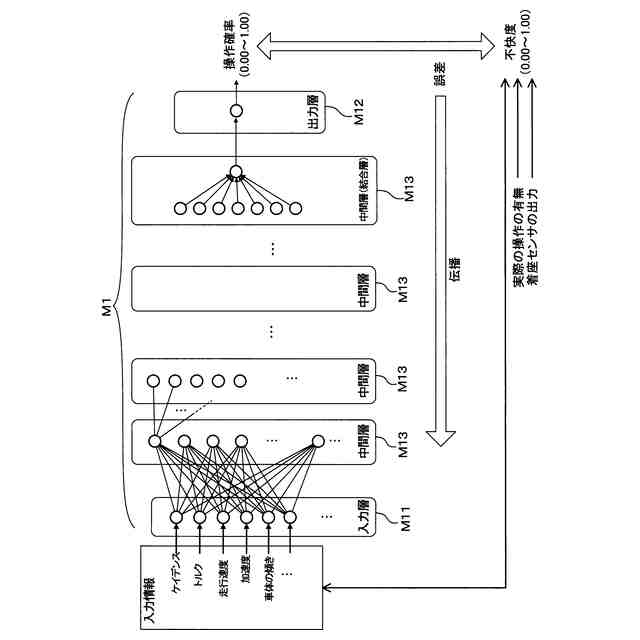
【解決手段】人力駆動車制御装置は、記憶部から情報を読み出して処理を実行するプロセッサを備え、前記プロセッサは、人力駆動車の走行に関する入力情報を取得し、取得した入力情報に基づき、所定の制御アルゴリズムによって前記人力駆動車に搭載されているデバイスの制御データを決定し、決定した制御データによって前記デバイスを自動制御し、前記入力情報に基づき、前記デバイスの自動制御に対してライダが介入操作する確率を出力する操作確率出力モデルを用い、前記操作確率出力モデルから出力された確率が所定値以上であることが確定的であり、且つ、前記介入操作がされたことが確定した場合に、前記所定の制御アルゴリズムのパラメータを変更する。
【選択図】図6
特許請求の範囲
【請求項1】
記憶部から情報を読み出して処理を実行するプロセッサを備え、
前記プロセッサは、
人力駆動車の走行に関する入力情報を取得し、
取得した入力情報に基づき、所定の制御アルゴリズムによって前記人力駆動車に搭載されているデバイスの制御データを決定し、
決定した制御データによって前記デバイスを自動制御し、
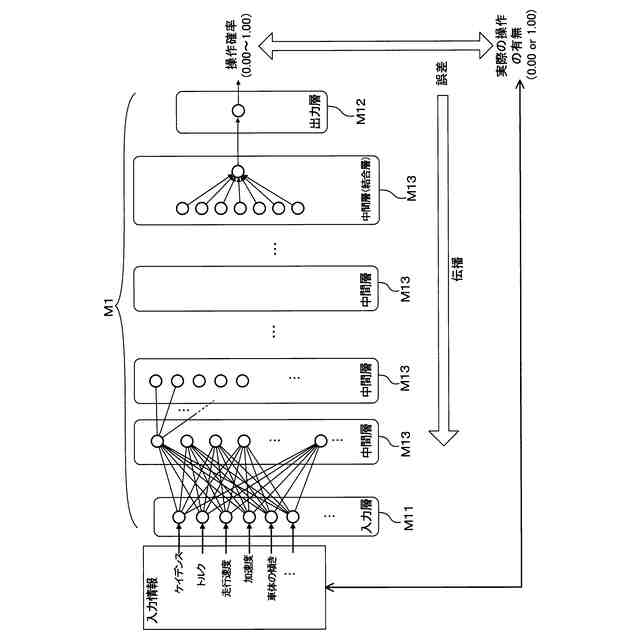
前記入力情報に基づき、前記デバイスの自動制御に対してライダが介入操作する確率を出力する操作確率出力モデルを用い、
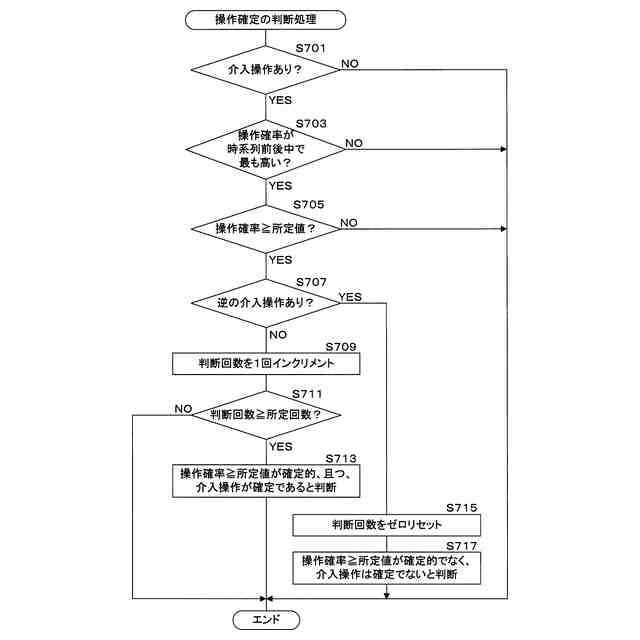
前記操作確率出力モデルから出力された確率が所定値以上であることが確定的であり、且つ、前記介入操作がされたことが確定した場合に、前記所定の制御アルゴリズムのパラメータを変更する
人力駆動車制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記プロセッサは、前記操作確率出力モデルから出力された確率が、時系列的にピークであって且つ所定値以上である場合に、前記確率が所定値以上であることが確定的であると判断する、
請求項1に記載の人力駆動車制御装置。
【請求項3】
前記プロセッサは、前記デバイスに前記ライダから介入操作がされ、前記介入操作から所定時間以内に、前記デバイスへの他の介入操作がされていない場合に、前記介入操作がされたことが確定したと判断する、
請求項1に記載の人力駆動車制御装置。
【請求項4】
前記入力情報を入力とし、前記入力情報が取得された所定時間後のライダの前記デバイスへの介入操作の有無を出力のラベルとして前記操作確率出力モデルを学習する学習部を備える、
請求項1に記載の人力駆動車制御装置。
【請求項5】
前記入力情報を入力とし、前記入力情報が取得された所定時間後のライダの不快度に対応する値を出力のラベルとして前記操作確率出力モデルを学習する学習部を備える、
請求項1に記載の人力駆動車制御装置。
【請求項6】
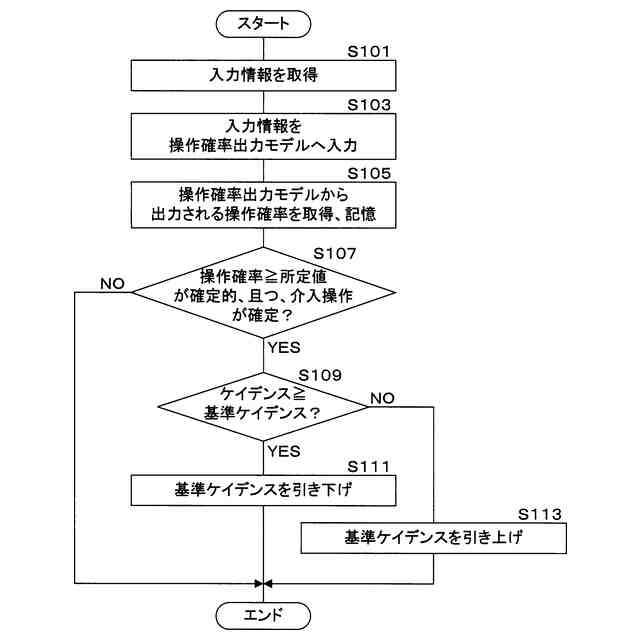
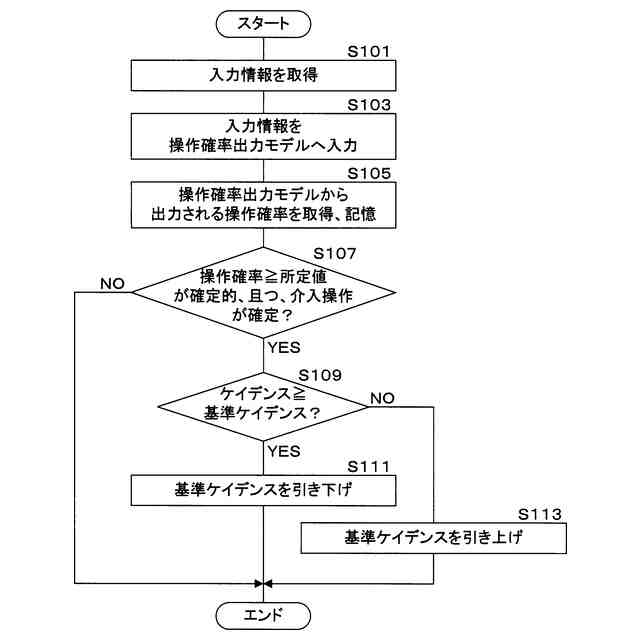
前記デバイスは前記人力駆動車の変速装置であって、前記入力情報は前記人力駆動車の駆動機構のクランクのケイデンスを含み、
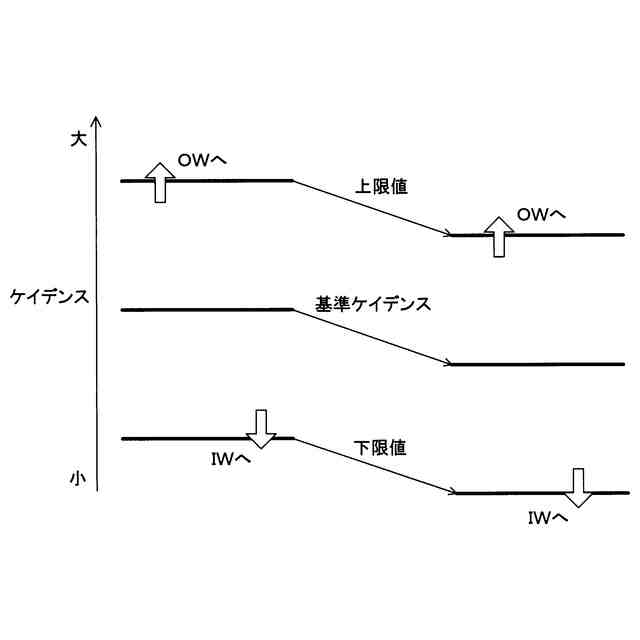
前記プロセッサは、前記パラメータとして、前記変速装置における変速比を決定するための前記ケイデンスと比較する基準ケイデンスを、引き上げるか、または引き下げて変更する
請求項1に記載の人力駆動車制御装置。
【請求項7】
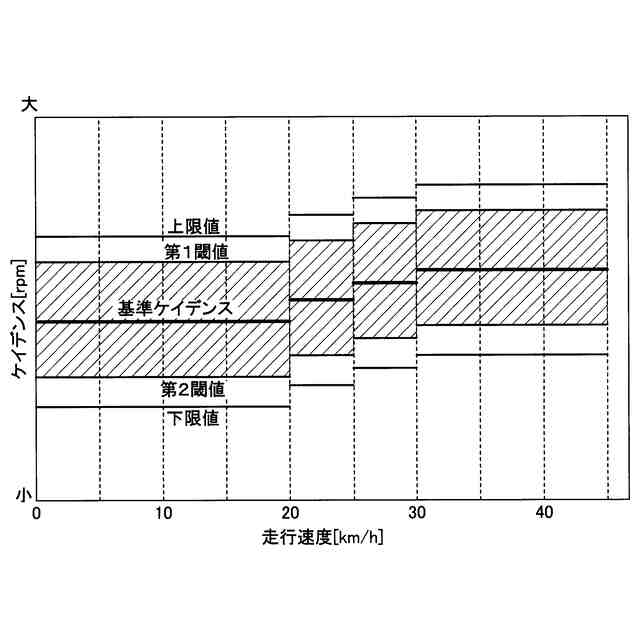
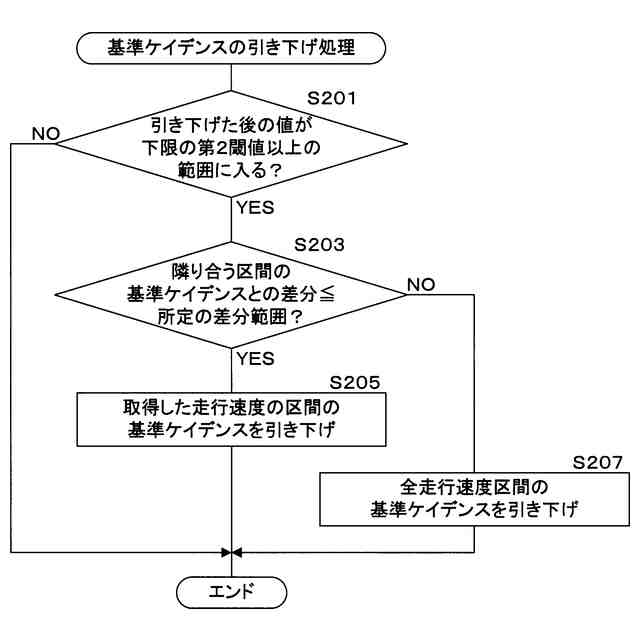
前記入力情報は前記人力駆動車の走行速度を含み、
前記基準ケイデンスは、前記走行速度の区間毎に設定されており、
前記プロセッサは、前記入力情報の走行速度が含まれる区間における基準ケイデンスを、隣り合う区間における基準ケイデンスとの差分を所定範囲に維持して変更する、
請求項6に記載の人力駆動車制御装置。
【請求項8】
前記デバイスは前記人力駆動車の変速装置であって、前記入力情報は前記人力駆動車の駆動機構のクランクのトルクを含み、
前記プロセッサは、前記パラメータとして、前記変速装置における変速比を決定するための前記トルクと比較する基準トルクを、引き上げるか、または引き下げて変更する、
請求項1から3のいずれか1項に記載の人力駆動車制御装置。
【請求項9】
前記デバイスは前記人力駆動車のアシスト装置であって、前記入力情報は前記人力駆動車の駆動機構のクランクのケイデンスを含み、
前記プロセッサは、前記パラメータとして、前記アシスト装置における出力を決定するための前記ケイデンスと比較する基準ケイデンスを、引き上げるか、または引き下げて変更する、
請求項1から3のいずれか1項に記載の人力駆動車制御装置。
【請求項10】
前記入力情報は前記人力駆動車の走行速度を含み、
前記基準ケイデンスは、前記走行速度の区間毎に設定されており、
前記プロセッサは、前記入力情報の走行速度が含まれる区間における基準ケイデンスを、隣り合う区間における基準ケイデンスとの差分を所定範囲に維持して変更する、
請求項9に記載の人力駆動車制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
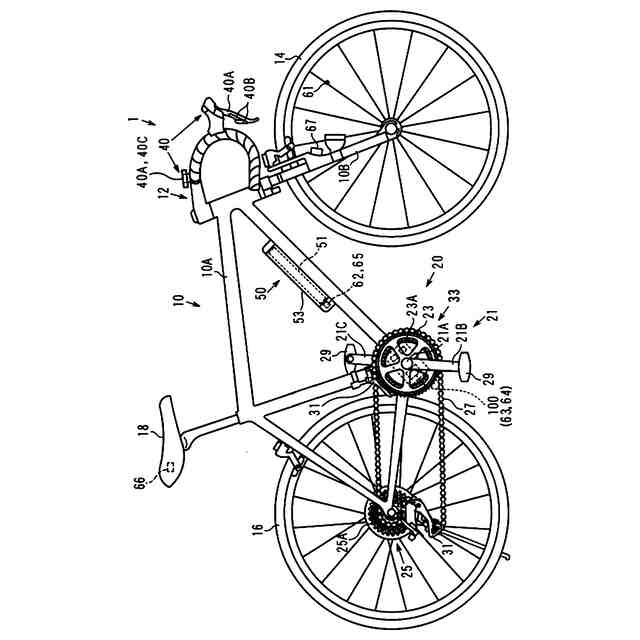
人力駆動車の電装化が進み、変速機、制動装置、アシスト装置を含む搭載デバイスの自動制御が実現されている。搭載デバイスの自動制御に用いる基準を、ライダの介入操作によって更新して最適化する技術も提案されている(特許文献1等)。
【先行技術文献】
【特許文献】
【0003】
特開2023-085936号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ライダの介入操作に基づく自動制御の基準の最適化を、ライダの誤操作の影響を低減しつつ、より適切に進行させることが望まれる。
【0005】
本発明は、ライダ個々に合わせた自動制御をより最適化する人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明の第1側面に従う人力駆動車制御装置は、記憶部から情報を読み出して処理を実行するプロセッサを備え、前記プロセッサは、人力駆動車の走行に関する入力情報を取得し、取得した入力情報に基づき、所定の制御アルゴリズムによって前記人力駆動車に搭載されているデバイスの制御データを決定し、決定した制御データによって前記デバイスを自動制御し、前記入力情報に基づき、前記デバイスの自動制御に対してライダが介入操作する確率を出力する操作確率出力モデルを用い、前記操作確率出力モデルから出力された確率が所定値以上であることが確定的であり、且つ、前記介入操作がされたことが確定した場合に、前記所定の制御アルゴリズムのパラメータを変更する。
【0007】
上記第1側面の人力駆動車制御装置によれば、シチュエーションに応じた人力駆動車に対するライダの操作意思に合わせるように、自動制御がより適切に最適化される。
【0008】
(2)本発明の第2側面に従う人力駆動車制御装置は、上記第1側面の人力駆動車制御装置において、前記プロセッサは、前記操作確率出力モデルから出力された確率が、時系列的にピークであって且つ所定値以上である場合に、前記確率が所定値以上であることが確定的であると判断する。
【0009】
上記第2側面の人力駆動車制御装置によれば、シチュエーションに応じた人力駆動車に対するライダの操作意思に合わせるように、自動制御がより適切に最適化される。
【0010】
(3)本発明の第3側面に従う人力駆動車制御装置は、上記第1側面の人力駆動車制御装置において、前記プロセッサは、前記デバイスに前記ライダから介入操作がされ、前記介入操作から所定時間以内に、前記デバイスへの他の介入操作がされていない場合に、前記介入操作がされたことが確定したと判断する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社シマノ
釣竿
6日前
株式会社シマノ
釣竿
23日前
株式会社シマノ
ルアー
7日前
株式会社シマノ
ルアー
28日前
株式会社シマノ
釣り具
28日前
株式会社シマノ
エンドグリップ
28日前
株式会社シマノ
魚釣用電動リール
29日前
株式会社シマノ
釣糸ガイド及び釣竿
1か月前
株式会社シマノ
人力駆動車用のコンポーネント
2日前
株式会社シマノ
人力駆動車用のコンポーネント
2日前
株式会社シマノ
人力駆動車用の変速機および人力駆動車用のコンポーネント
2日前
株式会社シマノ
人力駆動車用の変速機および人力駆動車用のコンポーネント
2日前
株式会社シマノ
人力駆動車用の変速装置および人力駆動車用のコンポーネント
2日前
株式会社シマノ
人力駆動車用の制御装置
23日前
株式会社シマノ
人力駆動車用の制御装置
1か月前
株式会社シマノ
人力駆動車用の制御システム
16日前
個人
カート
24日前
個人
走行装置
1か月前
個人
電動走行車両
1か月前
個人
乗り物
2か月前
個人
閂式ハンドル錠
1か月前
個人
折り畳み自転車
8か月前
個人
電動モビリティ
5か月前
個人
発音装置
4か月前
個人
自転車用傘捕捉具
9か月前
個人
“zen-go.”
1日前
個人
ルーフ付きトライク
7日前
個人
自由方向乗車自転車
5か月前
個人
体重掛けリフト台車
8か月前
個人
自転車用荷物台
8か月前
個人
キャンピングトライク
6か月前
個人
アタッチメント
9か月前
個人
ステアリングの操向部材
6か月前
個人
ステアリングの操向部材
11か月前
株式会社CPM
駐輪機
9か月前
株式会社豊田自動織機
産業車両
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ