TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106439
公報種別
公開特許公報(A)
公開日
2025-07-15
出願番号
2025063578,2021090448
出願日
2025-04-08,2021-05-28
発明の名称
人力駆動車用の制御システム
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B60T
8/92 20060101AFI20250708BHJP(車両一般)
要約
【課題】信頼性の高い人力駆動車用の制御システムを提供する。
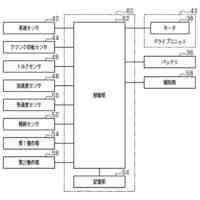
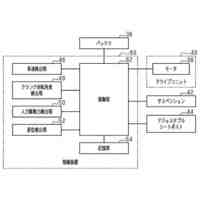
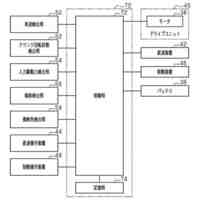
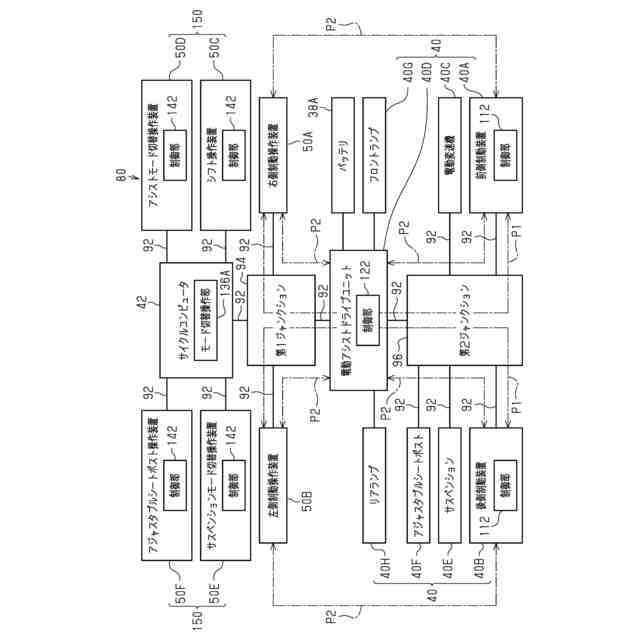
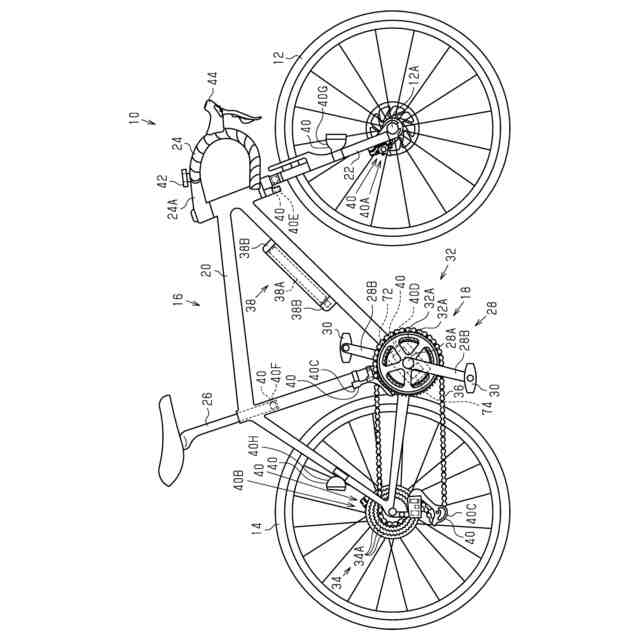
【解決手段】人力駆動車用の制御システムは、車輪を制動するように構成される制動装置と、前記制動装置を作動させるために操作される制動操作装置と、前記制動操作装置とは異なる予備制動操作装置と、制御モードに応じて前記制動装置を含む作動装置を制御するように構成される制御部と、を備え、前記制御モードは、第1モードと第2モードとを有し、前記制御部は、前記制御モードが前記第1モードである場合に、前記予備制動操作装置の操作に応答した前記制動装置の作動を許容しないように構成され、前記制御部は、前記制御モードが前記第2モードである場合に、前記予備制動操作装置の操作に応答して前記制動装置を作動させるように構成される。
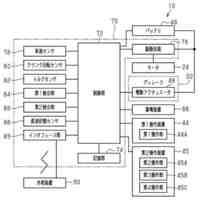
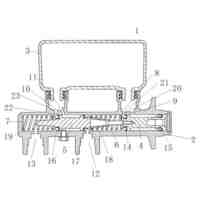
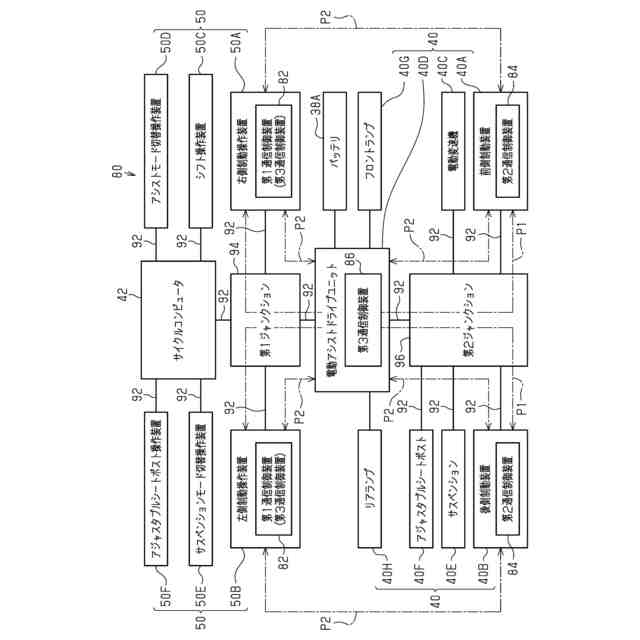
【選択図】図13
特許請求の範囲
【請求項1】
人力駆動車用の制御システムであって、
車輪を制動するように構成される制動装置と、
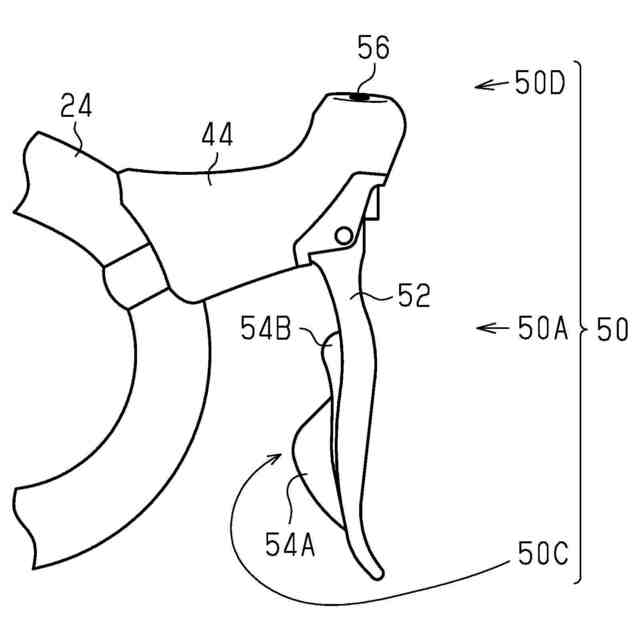
前記制動装置を作動させるために操作される制動操作装置と、
前記制動操作装置とは異なる予備制動操作装置と、
制御モードに応じて前記制動装置を含む作動装置を制御するように構成される制御部と、を備え、
前記制御モードは、第1モードと第2モードとを有し、
前記制御部は、前記制御モードが前記第1モードである場合に、前記予備制動操作装置の操作に応答した前記制動装置の作動を許容しないように構成され、
前記制御部は、前記制御モードが前記第2モードである場合に、前記予備制動操作装置の操作に応答して前記制動装置を作動させるように構成される、制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記制動装置と前記制動操作装置との間に設けられる通信経路をさらに備え、
前記制御部は、前記制御モードに前記第1モードを選択している際に、前記制動装置、前記制動操作装置、および、前記通信経路のうちの少なくとも1つに異常がある場合に、前記制御モードを前記第1モードから前記第2モードに切り替えるように構成される、請求項1に記載の制御システム。
【請求項3】
前記制動装置、前記制動操作装置、および、前記通信経路のうちの少なくとも1つの異常を検出するように構成される検出装置をさらに備え、
前記制御部は、前記制御モードに前記第1モードを選択している際に前記検出装置が異常を検出した場合に、前記制御モードを前記第1モードから前記第2モードに切り替えるように構成される、請求項2に記載の制御システム。
【請求項4】
前記通信経路は有線通信経路である、請求項2または3に記載の制御システム。
【請求項5】
前記制動操作装置は、ブレーキレバーと、前記ブレーキレバーの操作を検出するセンサと、を有し、
前記制御部は、前記制御モードに前記第1モードを選択している際に、前記センサに異常がある場合に、前記制御モードを前記第1モードから前記第2モードに切り替えるように構成される、請求項1から4のいずれか一項に記載の制御システム。
【請求項6】
前記制御モードを前記第1モードおよび前記第2モードの一方から他方に切り替えるために操作されるモード切替操作部をさらに備える、請求項1から5のいずれか一項に記載の制御システム。
【請求項7】
前記制御部は、前記制御モードが前記第1モードである場合に、前記予備制動操作装置の操作に応答して、前記制動装置とは異なる作動装置を作動させるように構成される、請求項1から6のいずれか一項に記載の制御システム。
【請求項8】
前記制動装置とは異なる前記作動装置は、電動変速機、電動アシストドライブユニット、サスペンション、および、アジャスタブルシートポストのうちの少なくとも1つを含む、請求項7に記載の制御システム。
【請求項9】
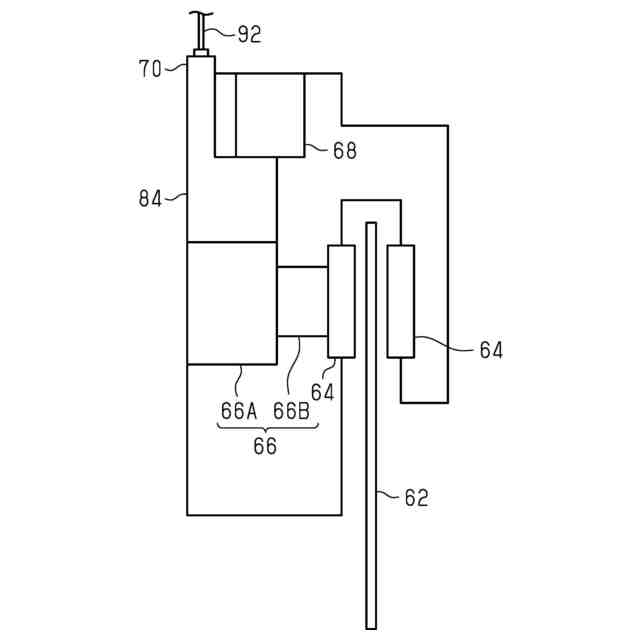
前記予備制動操作装置はクランクであり、
前記制御部は、前記制御モードが前記第1モードである場合に、前記クランクの逆回転に応答した前記制動装置の作動を許容しないように構成され、
前記制御部は、前記制御モードが前記第2モードである場合に、前記クランクの逆回転に応答して前記制動装置を作動させるように構成される、請求項1から8のいずれか一項に記載の制御システム。
【請求項10】
前記制御部は、前記クランクの逆回転速度に応じた制動力を発揮させるように前記制動装置を制御するように構成される、請求項9に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、人力駆動車用の制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、人力駆動車用の電動制動システムが開示されている。操作装置を操作すると、制動装置が電力によって作動する。
【先行技術文献】
【特許文献】
【0003】
特開2019-202659号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人力駆動車において、操作装置の操作に応答して制動装置のような作動装置を電力によって作動させる制御システムには、高い信頼性が要求される。
本開示の目的の1つは、信頼性の高い人力駆動車用の制御システムを提供することである。
【課題を解決するための手段】
【0005】
本開示の第1側面に従う人力駆動車用の制御システムは、車輪を制動するように構成される制動装置と、前記制動装置を作動させるために操作される制動操作装置と、前記制動装置と前記制動操作装置との間において第1作動信号を通信するように構成される第1通信経路と、前記制動装置と前記制動操作装置との間において第2作動信号を通信するように構成され、かつ、前記第1通信経路とは異なる第2通信経路と、を備える。
第1側面の制御システムは、複数の通信経路が存在するため冗長性を有する。このため、制動装置と制動操作装置との間における通信に対する信頼性が向上するので、制御システムの信頼性が向上する。
【0006】
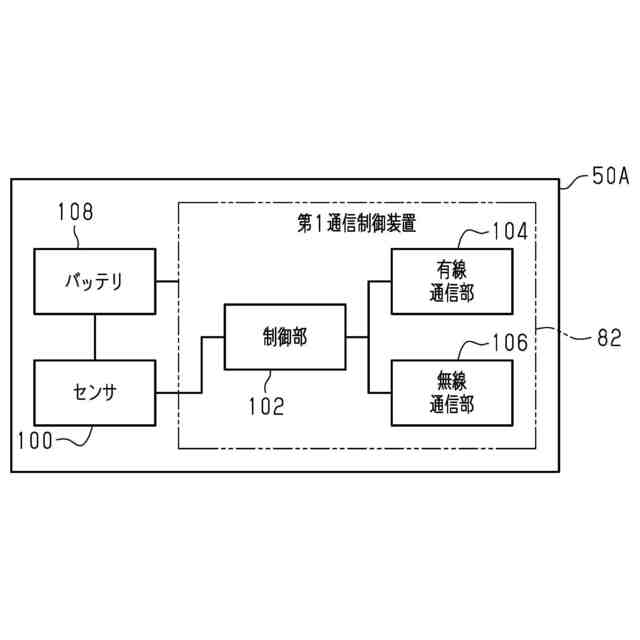
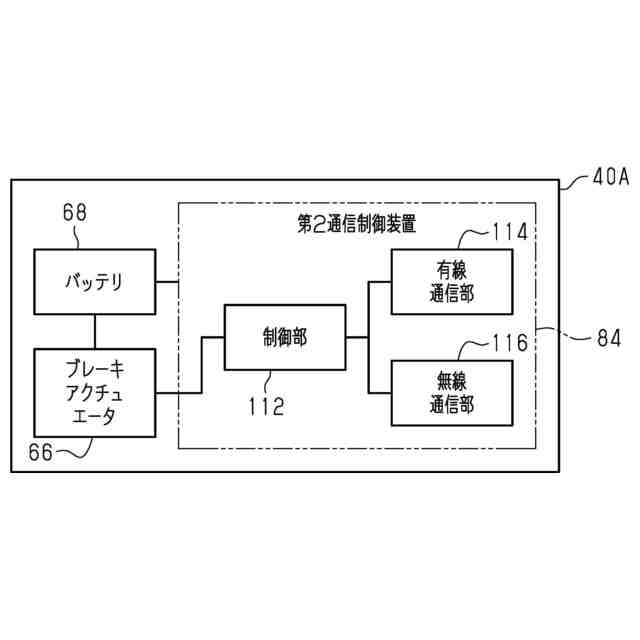
本開示の第1側面に従う第2側面の制御システムは、前記制動操作装置に設けられる第1通信制御装置と、前記制動装置に設けられる第2通信制御装置と、前記制動操作装置および前記第1通信経路の少なくとも1つに設けられる第3通信制御装置と、を備え、前記第1通信制御装置は、前記制動操作装置の操作に応答して、前記第1通信経路を介して前記第1作動信号を送信するように構成され、前記第2通信制御装置は、前記第1作動信号の受信に応答して、応答信号を送信するように構成され、前記第3通信制御装置は、前記第1通信制御装置からの前記第1作動信号の送信後に前記第2通信制御装置からの前記応答信号を受信できない場合、前記第2通信経路を介して前記第2通信制御装置に前記第2作動信号を送信するように構成される。
第2側面の制御システムによれば、第2通信制御装置は、第1作動信号を受信できない場合、第2通信経路を介して第2作動信号を受信できる。このため、制動装置の作動に対する信頼性が向上する。
【0007】
本開示の第2側面に従う第3側面の人力駆動車用の制御システムにおいて、前記第3通信制御装置は前記制動操作装置に設けられ、前記第1通信制御装置は前記第3通信制御装置を兼用する。
第3側面の制御システムによれば、制御システムの構成が簡素化される。
【0008】
本開示の第4側面に従う人力駆動車用の制御システムは、作動装置と、前記作動装置を作動させるために操作される操作装置と、前記操作装置に設けられる第1通信制御装置と、前記作動装置に設けられる第2通信制御装置と、前記第1通信制御装置と前記第2通信制御装置との間において第1作動信号を通信するように構成される第1通信経路と、前記操作装置および前記第1通信経路の少なくとも1つに設けられる第3通信制御装置と、前記第2通信制御装置と前記第3通信制御装置との間において第2作動信号を通信するように構成され、かつ、前記第1通信経路とは異なる第2通信経路と、を備え、前記第1通信制御装置は、前記操作装置の操作に応答して、前記第1通信経路を介して前記第1作動信号を送信するように構成され、前記第2通信制御装置は、前記第1作動信号の受信に応答して、応答信号を送信するように構成され、前記第3通信制御装置は、前記第1通信制御装置からの前記第1作動信号の送信後に前記第2通信制御装置からの前記応答信号を受信できない場合、前記第2通信経路を介して前記第2作動信号を送信するように構成される。
第4側面の制御システムによれば、第2通信制御装置は、第1作動信号を受信できない場合、第2通信経路を介して第2作動信号を受信できる。このため、作動装置の作動に対する信頼性が向上する。
【0009】
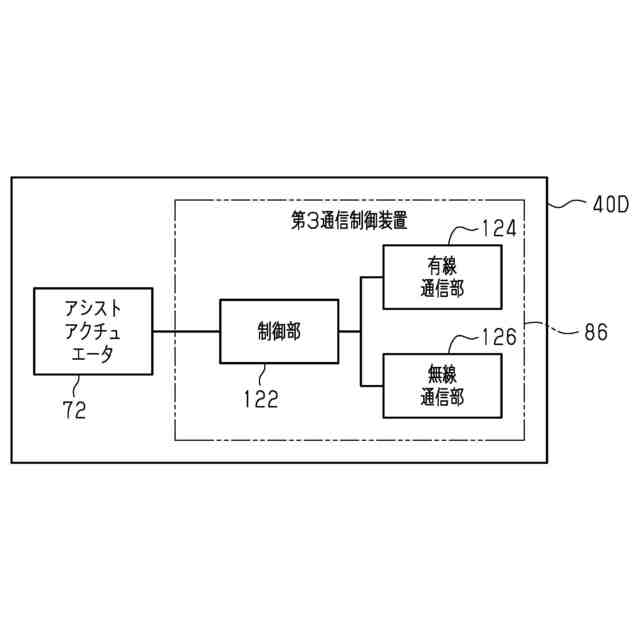
本開示の第4側面に従う第5側面の制御システムにおいて、前記作動装置は、制動装置、電動変速機、電動アシストドライブユニット、サスペンション、および、アジャスタブルシートポストのうちの少なくとも1つを含む。
第5側面の制御システムによれば、制動装置、電動変速機、電動アシストドライブユニット、サスペンション、および、アジャスタブルシートポストのうちの少なくとも1つの作動に対する信頼性が向上する。
【0010】
本開示の第4側面または第5側面に従う第6側面の制御システムにおいて、前記第3通信制御装置は前記操作装置に設けられ、前記第1通信制御装置は前記第3通信制御装置を兼用する。
第6側面の制御システムによれば、制御システムの構成が簡素化される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社シマノ
ルアー
1か月前
株式会社シマノ
ルアー
8日前
株式会社シマノ
ルアー
8日前
株式会社シマノ
ルアー
1か月前
株式会社シマノ
ルアー
16日前
株式会社シマノ
ルアー
1か月前
株式会社シマノ
釣糸情報学習システム
1か月前
株式会社シマノ
人力駆動車用の制御装置
1か月前
株式会社シマノ
人力駆動車用の制御装置
8日前
株式会社シマノ
人力駆動車用の制御装置
8日前
株式会社シマノ
人力駆動車用の制御装置
29日前
株式会社シマノ
人力駆動車用のドライブユニット
22日前
株式会社シマノ
人力駆動車用のドライブユニット
22日前
株式会社シマノ
人力駆動車用の制御装置
8日前
株式会社シマノ
人力駆動車用の制御装置
18日前
株式会社シマノ
人力駆動車制御装置、人力駆動車制御方法、およびコンピュータプログラム
19日前
株式会社シマノ
人力駆動車用のアシスト装置、人力駆動車用の変速装置、および、人力駆動車用の制御システム
9日前
株式会社シマノ
人力駆動車用の制御装置および動力伝達システム
16日前
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
4か月前
個人
前輪キャスター
1か月前
個人
警告装置
5か月前
個人
ホイルのボルト締結
2か月前
個人
タイヤ脱落防止構造
1か月前
個人
車輪清掃装置
4か月前
個人
ルーフ付きトライク
1か月前
日本精機株式会社
表示装置
1か月前
個人
マスタシリンダ
1日前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
車両通過構造物
2か月前
個人
キャンピングトライク
3か月前
日本精機株式会社
表示装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ