TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025071619
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181939
出願日
2023-10-23
発明の名称
モータ制御方法及びモータ制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
H02P
21/22 20160101AFI20250428BHJP(電力の発電,変換,配電)
要約
【課題】暖機効率が向上したモータ制御方法及びモータ制御装置を提供する。
【解決手段】オープン巻線型のモータと、電力を変換して前記モータに供給するインバータとを備えるモータユニットにおけるモータ制御方法が提供される。このモータ制御方法は、モータ及びインバータの電力損失を増加させるように、モータに零相電流を通流させて、モータ及びインバータを暖機する。
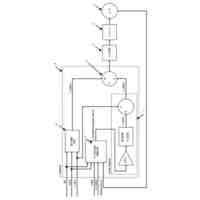
【選択図】図3
特許請求の範囲
【請求項1】
オープン巻線型のモータと、電力を変換して前記モータに供給するインバータとを備えるモータユニットにおけるモータ制御方法であって、
前記モータ及び前記インバータの電力損失を増加させるように、前記モータに零相電流を通流させて、前記モータ及び前記インバータを暖機する、
モータ制御方法。
続きを表示(約 2,800 文字)
【請求項2】
請求項1に記載のモータ制御方法であって、
前記モータに供給される電流のd軸成分とq軸成分からなるdq軸座標における動作点を、等トルク線上の別の動作点へ移動させ、前記モータ及び前記インバータの電力損失を増加させることで前記モータ及び前記インバータを暖機する第1暖機方法と、
前記モータ及び前記インバータの電力損失を増加させるように、前記モータに零相電流を通流させて、前記モータ及び前記インバータを暖機する第2暖機方法と、を併用する、
モータ制御方法。
【請求項3】
請求項2に記載のモータ制御方法であって、
前記モータは車両用モータであり、
前記車両が停止中の場合、前記第2暖機方法により前記モータ及び前記インバータを暖機する、
モータ制御方法。
【請求項4】
請求項2に記載のモータ制御方法であって、
前記第2暖機方法により前記モータ及び前記インバータを暖機する場合、前記モータに通流させる前記零相電流は直流電流である、
モータ制御方法。
【請求項5】
請求項2に記載のモータ制御方法であって、
前記モータのトルクまたは前記トルクに相関のあるパラメータに基づき、前記第1暖機方法及び前記第2暖機方法の一方、または両方を用いて前記モータ及び前記インバータを暖機する、
モータ制御方法。
【請求項6】
請求項5に記載のモータ制御方法であって、
前記モータのトルクが所定の第1トルク以下の場合、前記第2暖機方法により前記モータ及び前記インバータを暖機する、
モータ制御方法。
【請求項7】
請求項6に記載のモータ制御方法であって、
前記モータのトルクが所定の第1トルク以下の場合、前記モータの各相のうち、相電流が最も大きい相における相電流である相電流最大値の絶対値が、相電流が最も小さい相における相電流である相電流最小値の絶対値以上のときは、各相の相電流が負側にオフセットするように前記零相電流を通流させ、相電流最大値の絶対値が、相電流最小値の絶対値よりも小さいときは、各相の相電流が正側にオフセットするように前記零相電流を通流させる、
モータ制御方法。
【請求項8】
請求項5から7のいずれか一つに記載のモータ制御方法であって、
前記モータのトルクが所定の第2トルクより大きい場合、前記第1暖機方法と前記第2暖機方法の両方を用いて前記モータ及び前記インバータを暖機する、
モータ制御方法。
【請求項9】
請求項8に記載のモータ制御方法であって、
前記モータのトルクが所定の第2トルクより大きい場合、前記第1暖機方法と前記第2暖機方法の両方を用いて前記モータ及び前記インバータを暖機するときに、前記第2暖機方法よりも前記第1暖機方法の方が、暖機への寄与率が大きい、
モータ制御方法。
【請求項10】
請求項8に記載のモータ制御方法であって、
前記モータに流れる電流が前記モータ及び前記インバータの暖機に必要な電流量となるような、必要電流量に応じた零相電流値を算出し、
前記モータに通流させる零相電流の指令値をi
z
*
、前記モータの各相のうち、相電流が最も大きい相における相電流である相電流最大値をi
heat_max
、相電流が最も小さい相における相電流である相電流最小値をi
heat_min
、前記モータの許容電流値をi
INV
、前記必要電流量に応じた零相電流値をi
z_heat_map
とした場合に、
前記モータのトルクが所定の第1トルク以下であって、前記相電流最大値i
heat_max
の絶対値が前記相電流最小値i
heat_min
の絶対値以上の場合、
前記必要電流量に応じた零相電流値i
z_heat_map
と前記相電流の最小値i
heat_min
との差の絶対値が、前記モータの許容電流値i
INV
を超えるときは、前記零相電流の指令値をi
z
*
を以下の式(1)により算出し、算出した前記零相電流の指令値i
z
*
に基づき零相電流を前記モータに通流させ、
TIFF
2025071619000013.tif
8
170
前記必要電流量に応じた零相電流値i
z_heat_map
と前記相電流の最小値i
heat_min
との差の絶対値が、前記モータの許容電流値i
INV
以下のときは、前記零相電流の指令値i
z
*
を以下の式(2)により算出し、算出した前記零相電流の指令値i
z
*
に基づき零相電流を前記モータに通流させ、
TIFF
2025071619000014.tif
6
170
前記モータのトルクが前記所定の第1トルク以下であって、前記相電流最大値i
heat_max
の絶対値が前記相電流最小値i
heat_min
の絶対値よりも小さい場合、
前記必要電流量に応じた零相電流値i
z_heat_map
に前記相電流の最大値i
heat_max
を加算した値の絶対値が、前記モータの許容電流値i
INV
を超えるときは、前記零相電流の指令値i
z
*
を以下の式(3)により算出し、算出した前記零相電流の指令値をi
z
*
に基づき零相電流を前記モータに通流させ、
TIFF
2025071619000015.tif
8
170
前記必要電流量に応じた零相電流値i
z_heat_map
に前記相電流の最大値i
heat_max
を加算した値の絶対値が、前記モータの許容電流値i
INV
以下のときは、前記零相電流の指令値i
z
*
を以下の式(4)により算出し、算出した前記零相電流の指令値をi
z
*
に基づき零相電流を前記モータに通流させる、
TIFF
2025071619000016.tif
6
170
モータ制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御方法及びモータ制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、モータ駆動制御をベクトル制御にて行うモータ制御装置が開示されている。このモータ制御装置では、バッテリの暖機が必要な場合、バッテリの温度が低いほどモータに流すd軸電流を増加させることで、暖機速度を上昇させている。
【先行技術文献】
【特許文献】
【0003】
特開2012-165526号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のモータ制御装置では、暖機が必要な場合、バッテリ温度に応じて、d軸電流を流すため、モータの各相に通流する電流量が不均衡な状態となる。このため、電流量が最大となっている相の電流値が、モータや周辺機器の電流制限値に達してしまうと、他の相に通流する電流量が低い状態であっても、それ以上電流を流せなくなり、暖機効率が低下する虞がある。
【0005】
本発明は上記課題に鑑みたものであり、暖機効率が向上したモータ制御方法及びモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、オープン巻線型のモータと、電力を変換して前記モータに供給するインバータとを備えるモータユニットにおけるモータ制御方法が提供される。このモータ制御方法は、モータ及びインバータの電力損失を増加させるように、モータに零相電流を通流させて、モータ及びインバータを暖機する。
【発明の効果】
【0007】
本発明によれば、モータ及びインバータの電力損失を増加させるように、モータに零相電流を通流させて、モータ及びインバータを暖機する。このように、モータ及びインバータの暖機において、モータの各相に共通に流れる零相電流を通流させて、零相電流を増大させるため、電流制限値の範囲内で、モータに流れる電流を最大化することができる。従って、暖機時にモータ及びインバータの発熱量が最大化され、暖機効率が向上する。
【図面の簡単な説明】
【0008】
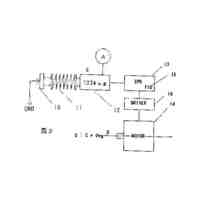
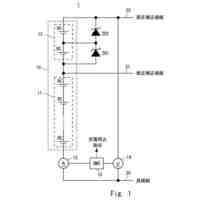
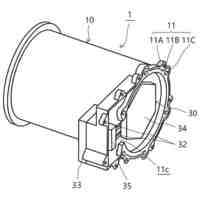
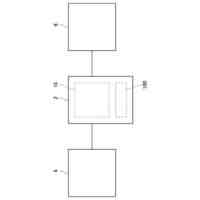
図1は、本発明の実施形態によるモータ制御方法を適用したモータユニットを搭載した車両の概略構成図である。
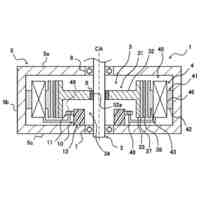
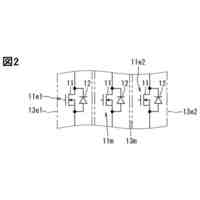
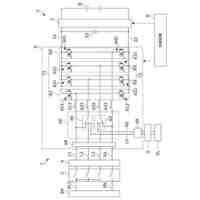
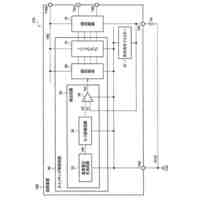
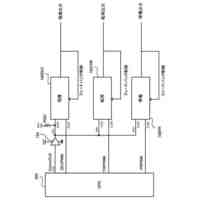
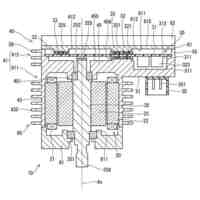
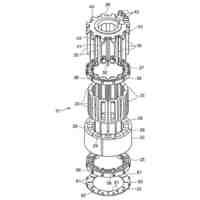
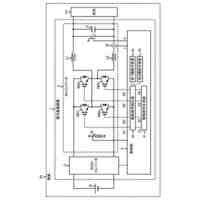
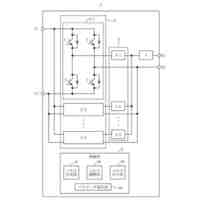
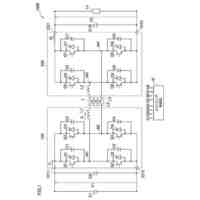
図2は、モータユニットの概略構成図である。
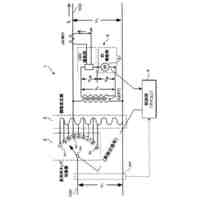
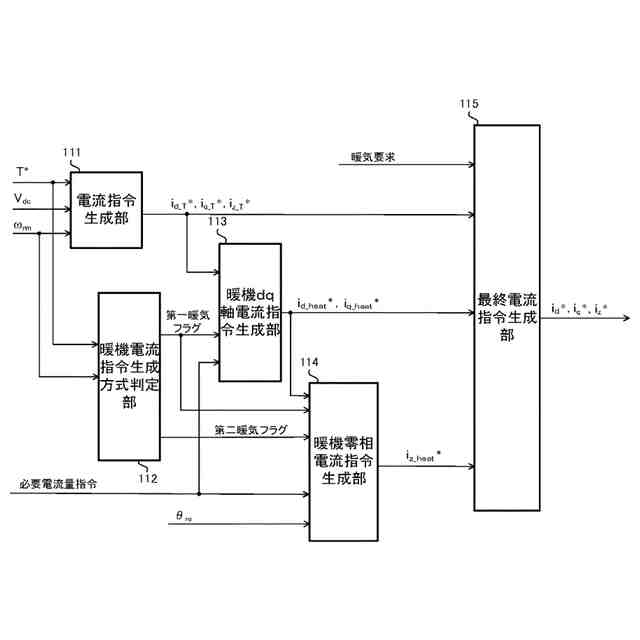
図3は、電流指令値演算部の詳細構成を示す図である。
図4は、第1暖機方法を説明する図である。
図5は、零相電流重畳前の相電流波形を示す図である。
図6は、零相電流重畳後の相電流波形を示す図である。
図7は、暖機電流指令生成方式の選択方法を示す図である。
図8は、d軸電流通流時のモータ角度に対する相電流値を示す図である。
図9は、暖機dq軸電流指令値の算出方法を説明する図である。
図10は、UVW相電流指令値を示す図である。
図11は、UVW相電流指令値を示す図である。
図12は、暖機制御を説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面等を参照しながら、本発明の実施形態について説明する。
【0010】
[実施形態]
図1は、本発明の実施形態によるモータ制御方法を適用したモータユニット100を搭載した車両1の概略構成図である。図1に示すように、車両1は、モータユニット100と、減速機101と、ディファレンシャルギア102と、ドライブシャフト103と、駆動輪104と、バッテリ105と、BMS106と、VCM107と、により構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニデック株式会社
モータ
8日前
株式会社アイドゥス企画
負荷追従電動モータ
2日前
ダイハツ工業株式会社
モータ製造装置
1日前
株式会社ダイヘン
電圧調整装置
8日前
株式会社アイシン
回転電機用ステータ製造方法
3日前
株式会社アイドゥス企画
磁力トルクコンバータ
2日前
株式会社アイシン
回転電機用ステータ製造方法
3日前
トヨタ紡織株式会社
磁石挿入装置
8日前
株式会社ゲットクリーンエナジー
発電機
9日前
株式会社ダイヘン
無線給電システム
8日前
株式会社TMEIC
電力変換装置
1日前
株式会社デンソー
電力変換装置
9日前
株式会社豊田自動織機
回転電機
8日前
トヨタバッテリー株式会社
二次電池システム
8日前
株式会社豊田自動織機
回転電機
8日前
三相電機株式会社
キャンドポンプ
1日前
トヨタ自動車株式会社
回転電機のステータ
2日前
本田技研工業株式会社
電源システム
1日前
本田技研工業株式会社
電源システム
1日前
セイコーエプソン株式会社
回路装置
1日前
日産自動車株式会社
インバータ内蔵モータ
2日前
パナソニックIPマネジメント株式会社
充放電装置
8日前
キヤノン株式会社
電源装置及び画像形成装置
8日前
トヨタ自動車株式会社
モータ制御方法
9日前
トヨタ自動車株式会社
導線製造方法及び導線製造装置
1日前
豊田合成株式会社
無線給電システム及び作動体
1日前
株式会社デンソー
駆動装置
9日前
サンデン株式会社
モータ及びそれを備えた電動圧縮機
9日前
サンデン株式会社
モータ及びそれを備えた電動圧縮機
2日前
株式会社豊田自動織機
電力変換装置
2日前
愛三工業株式会社
充電装置
8日前
グローブライド株式会社
アキシャルギャップモータ
2日前
ニチコン株式会社
インバータ装置
8日前
山洋電気株式会社
DC/DCコンバータ
8日前
株式会社プロテリアル
配線部材
8日前
豊田合成株式会社
ボタン型電池
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ