TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064520
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174352
出願日
2023-10-06
発明の名称
装置、方法、コントローラ、細胞培養システム、およびプログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05B
13/02 20060101AFI20250410BHJP(制御;調整)
要約
【課題】本発明は、装置、方法、コントローラ、細胞培養システム、およびプログラムに関する。
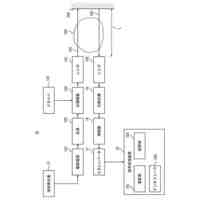
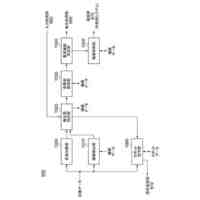
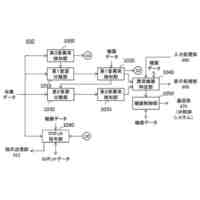
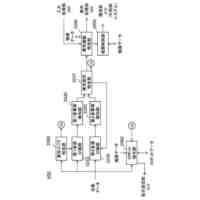
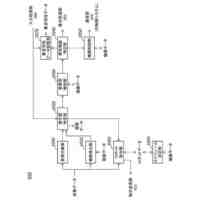
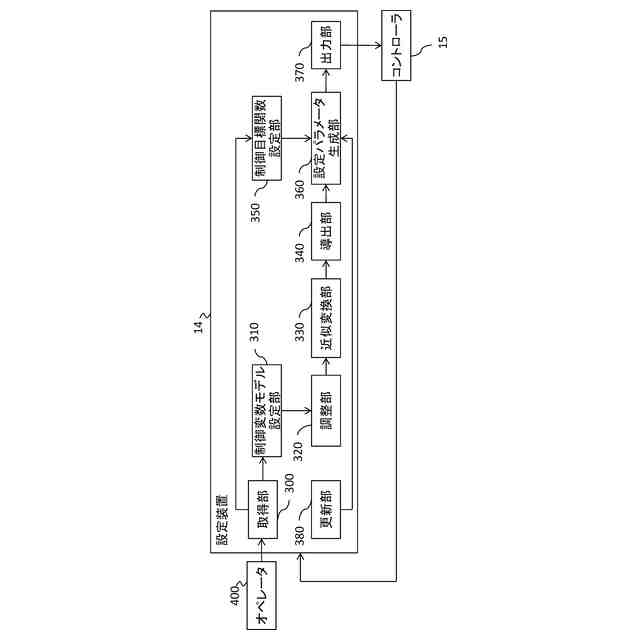
【解決手段】コントローラにより制御されるプロセスにおける制御対象の制御変数および制御目標を取得する取得部と、プロセスにおける制御変数の挙動を表す制御変数モデルと、コントローラの制御に用いられる制御関数とに基づいて、動作点近傍の閉ループ伝達関数を導出する導出部と、閉ループ伝達関数が制御目標から導出される制御目標関数に適合するように、コントローラの制御に用いる設定パラメータを生成する設定パラメータ生成部と、を備える装置が提供される。
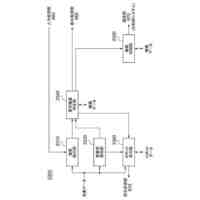
【選択図】図3
特許請求の範囲
【請求項1】
コントローラにより制御されるプロセスにおける制御対象の制御変数および制御目標を取得する取得部と、
前記プロセスにおける前記制御変数の挙動を表す制御変数モデルと、前記コントローラの制御に用いられる制御関数とに基づいて、前記プロセスの動作点近傍の閉ループ伝達関数を導出する導出部と、
前記閉ループ伝達関数が前記制御目標から設定される制御目標関数に適合するように、前記コントローラの制御に用いる設定パラメータを生成する設定パラメータ生成部と、を備える
装置。
続きを表示(約 890 文字)
【請求項2】
前記制御変数モデルを、前記プロセスの動作点近傍で線形に近似した近似制御変数モデルに変換する近似変換部を更に備え、
前記導出部は、前記近似制御変数モデルと前記制御関数とに基づいて、前記動作点近傍の閉ループ伝達関数を導出する
請求項1に記載の装置。
【請求項3】
前記制御変数モデルに、前記プロセスにおける少なくとも1つの変数を相殺するフィードフォワード調整量を設定する調整部を更に備える
請求項1に記載の装置。
【請求項4】
前記制御関数は、PID制御方式に対応する関数である
請求項1に記載の装置。
【請求項5】
前記設定パラメータを、前記プロセスの動作条件に基づいて更新する更新部を更に備える
請求項1に記載の装置。
【請求項6】
前記設定パラメータ生成部は、前記閉ループ伝達関数が前記制御目標関数に適合するように、部分的モデルマッチング法を用いて前記設定パラメータを生成する
請求項1に記載の装置。
【請求項7】
前記制御目標関数を、前記制御目標に基づいて設定する制御目標関数設定部を更に備える
請求項1に記載の装置。
【請求項8】
前記制御目標関数設定部は、二項係数標準形、バターワース標準形、またはITAE(Integral of Time multiplied by Absolute Error)最小標準形の前記制御目標関数を設定する
請求項7に記載の装置。
【請求項9】
コントローラが、請求項1に記載の装置によって生成された設定パラメータを用いて、細胞培養プロセスのプロセス値のうちの少なくとも1つを制御する
方法。
【請求項10】
請求項1に記載の装置によって生成された設定パラメータによって細胞培養プロセスのプロセス値のうちの少なくとも1つをフィードバック制御する
コントローラ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、装置、方法、コントローラ、細胞培養システム、およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1~12および非特許文献1~2には、「細胞培養プロセスの培養データからリアクタシステムにおける細胞培養プロセスのための最適化された細胞培養プロセス仕様を提供する方法であって、・前記細胞培養プロセスの培養データを取得するステップ;・請求項1から6のいずれか1項記載の方法により得られるデジタルツインを適用することにより、取得した培養データから少なくとも1つの最適化された細胞培養プロセス仕様を調整または生成するステップ;を有する方法」(特許文献4の請求項7)等と記載されている。
[先行技術文献]
[特許文献]
特許文献1 国際公開第2020/252442号
特許文献2 米国特許出願公開第2019/153381号明細書
特許文献3 国際公開第2020/238918号
特許文献4 特表2022-537799号公報
特許文献5 特開2019-041656号公報
特許文献6 国際公開第2020/039683号
特許文献7 国際公開第2021/166824号
特許文献8 特開2007-202500号公報
特許文献9 特開2018-117567号公報
特許文献10 特表2009-510606号公報
特許文献11 特開昭59-045872号公報
特許文献12 特開2012-141791号公報
[非特許文献]
非特許文献1 村上聖、「分科会2、培養工程連続化の現状と課題」、生物工学会誌、第97巻、第6号
非特許文献2 Kano, M., Tasaka, K., Ogawa, M., Takinami, A., Takahashi, S., & Yoshii, S. (2011). Extended fictitious reference iterative tuning and its application to chemical processes. Proceedings of the 2011 4th International Symposium on Advanced Control of Industrial Processes, 379-384
【発明の概要】
【0003】
本発明の第1の態様においては、コントローラにより制御されるプロセスにおける制御対象の制御変数および制御目標を取得する取得部と、プロセスにおける制御変数の挙動を表す制御変数モデルと、コントローラの制御に用いられる制御関数とに基づいて、動作点近傍の閉ループ伝達関数を導出する導出部と、閉ループ伝達関数が制御目標から導出される制御目標関数に適合するように、コントローラの制御に用いる設定パラメータを生成する設定パラメータ生成部と、を備える装置が提供される。
【0004】
上記の装置においては、制御変数モデルを、プロセスの動作点近傍で線形に近似した近似制御変数モデルに変換する近似変換部を更に備え、導出部は、近似制御変数モデルと制御関数とに基づいて、動作点近傍の閉ループ伝達関数を導出してよい。
【0005】
上記何れかの装置においては、制御変数モデルに、プロセスにおける少なくとも1つの変数を相殺するフィードフォワード調整量を設定する調整部を更に備えてよい。
【0006】
上記何れかの装置においては、制御関数は、PID制御方式に対応する関数であってよい。
【0007】
上記何れかの装置においては、設定パラメータを、プロセスの動作条件に基づいて更新する更新部を更に備えてよい。
【0008】
上記何れかの装置においては、設定パラメータ生成部は、閉ループ伝達関数が制御目標関数に適合するように、部分的モデルマッチング法を用いて設定パラメータを生成してよい。
【0009】
上記何れかの装置においては、制御目標関数を、制御目標に基づいて設定する制御目標関数設定部を更に備えてよい。
【0010】
上記の装置においては、制御目標関数設定部は、二項係数標準形、バターワース標準形、またはITAE(Integral of Time multiplied by Absolute Error)最小標準形の制御目標関数を設定してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
プラント運転支援装置
4日前
横河電機株式会社
装置、方法およびプログラム
4日前
横河電機株式会社
ガス分析計及びガス分析方法
19日前
横河電機株式会社
視点補正を伴う熱イメージング
1か月前
横河電機株式会社
分光分析装置及び分光分析方法
10日前
横河電機株式会社
光パルス試験器及びプログラム
1か月前
横河電機株式会社
ガス測定装置およびガス測定方法
27日前
横河電機株式会社
装置、システム、方法およびプログラム
1か月前
横河電機株式会社
分析装置、分析方法および分析プログラム
6日前
横河電機株式会社
制御装置
17日前
横河電機株式会社
情報処理装置、情報処理システム及び情報処理装置の制御方法
13日前
横河電機株式会社
検知装置、時刻同期方法、時刻同期プログラム、及び検知システム
12日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
横河電機株式会社
施設内で検出された音響データを処理する装置、方法、およびプログラム
5日前
株式会社FUJI
工作機械
5日前
エイブリック株式会社
基準電圧回路
2か月前
株式会社ダイヘン
移動体
10日前
ローム株式会社
半導体集積回路
20日前
エイブリック株式会社
ボルテージレギュレータ
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
5日前
三栄ハイテックス株式会社
基準電圧回路
23日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社オプトン
制御プログラム生成装置
3日前
株式会社鷺宮製作所
制御装置
4日前
株式会社ダイヘン
負荷時タップ切換器
10日前
株式会社やまびこ
走行制御装置
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ