TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025057782
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167523
出願日
2023-09-28
発明の名称
ふらつき判定装置、ふらつき判定方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/08 20120101AFI20250402BHJP(車両一般)
要約
【課題】走行中の自車両のふらつきの有無を適切に判定する。
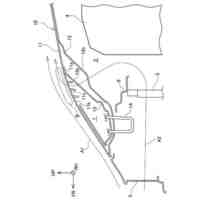
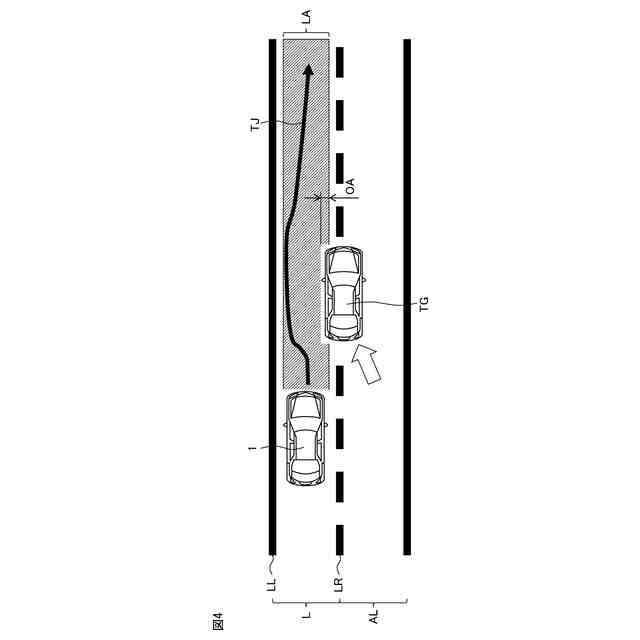
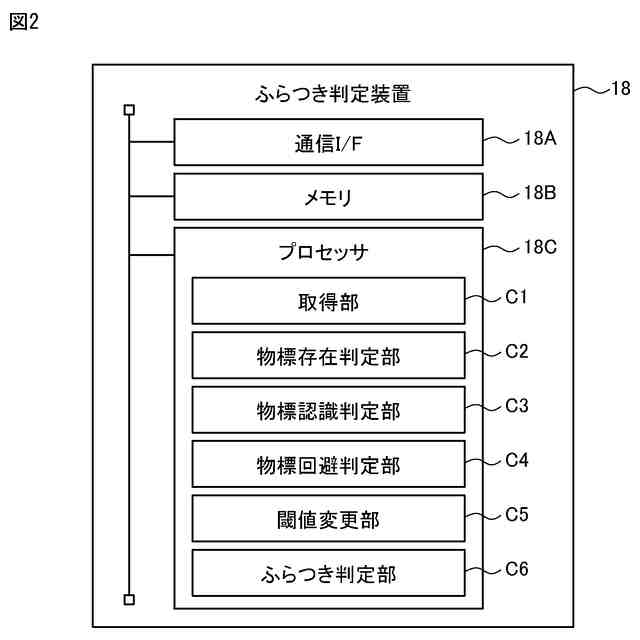
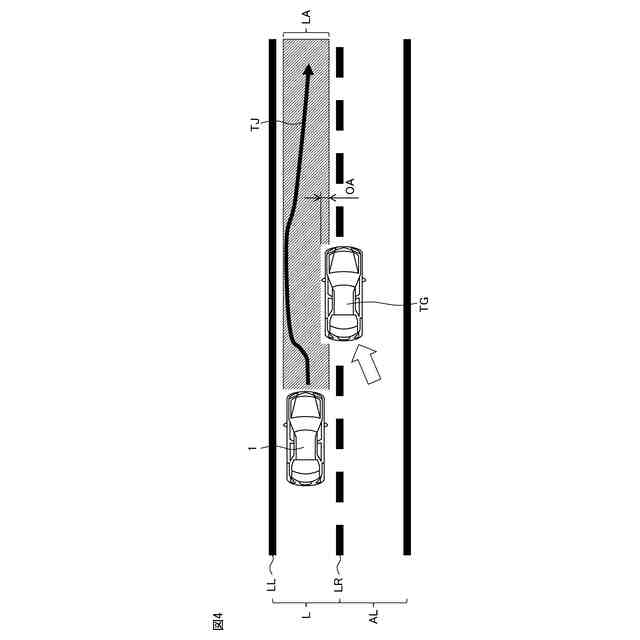
【解決手段】ふらつき判定装置18は、自車両1の走行中のふらつきの有無を判定するふらつき判定部C6を備え、走行中の自車両1の周辺に物標TGが存在する場合であって、自車両1の運転者の顔又は視線が物標TGに向けられている場合に、自車両1と物標TGとの位置関係に応じて、閾値変更部C5が自車両1の走行中のふらつきの有無の判定に用いられるふらつき判定用閾値を変更するか、あるいは、ふらつき判定部C6が自車両1の走行中のふらつきの有無の判定を停止する。
【選択図】図4
特許請求の範囲
【請求項1】
自車両の走行中のふらつきの有無を判定するふらつき判定部を備え、
走行中の前記自車両の周辺に物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記自車両と前記物標との位置関係に応じて、閾値変更部が前記自車両の走行中のふらつきの有無の判定に用いられるふらつき判定用閾値を変更するか、あるいは、前記ふらつき判定部が前記自車両の走行中のふらつきの有無の判定を停止する、ふらつき判定装置。
続きを表示(約 800 文字)
【請求項2】
前記閾値変更部は、走行中の前記自車両の周辺に前記物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記自車両の走行予定領域への前記物標の侵入量であるオーバーラップ量に応じて前記ふらつき判定用閾値を変更する、請求項1に記載のふらつき判定装置。
【請求項3】
前記閾値変更部は、走行中の前記自車両の周辺に前記物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記オーバーラップ量が大きいほど前記自車両の走行中のふらつきが無いと前記ふらつき判定部が判定し易くなるように前記ふらつき判定用閾値を変更する、請求項2に記載のふらつき判定装置。
【請求項4】
ふらつき判定装置が、自車両の走行中のふらつきの有無を判定するステップと、
走行中の前記自車両の周辺に物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記ふらつき判定装置が、前記自車両と前記物標との位置関係に応じて、前記自車両の走行中のふらつきの有無の判定に用いられるふらつき判定用閾値を変更するか、あるいは、前記自車両の走行中のふらつきの有無の判定を停止するステップとを備えるふらつき判定方法。
【請求項5】
プロセッサに、
自車両の走行中のふらつきの有無を判定するステップと、
走行中の前記自車両の周辺に物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記自車両と前記物標との位置関係に応じて、前記自車両の走行中のふらつきの有無の判定に用いられるふらつき判定用閾値を変更するか、あるいは、前記自車両の走行中のふらつきの有無の判定を停止するステップとを実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ふらつき判定装置、ふらつき判定方法及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、車両のふらつきを判定する技術について記載されている。特許文献1に記載された技術では、車両の走行シーン毎にふらつき挙動の学習が行われ、その学習結果を用いて車両のふらつき判定が実施される。
【先行技術文献】
【特許文献】
【0003】
特開2017-107299号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載された技術では、レーンチェンジ又はレーンチェンジ前後の追抜き時、自車両に隣接する大型車による自車両への幅寄せ時、工事や障害物による車線幅の減少区間の走行時等に、車両のふらつき挙動の学習が行われない。つまり、これらのシーンが、学習除外シーンに設定されている。すなわち、特許文献1に記載された技術では、レーンチェンジ前後の追抜き時(つまり、レーンチェンジの前後に自車両の周辺に存在する物標としての先行車両を自車両が追い抜く時)、自車両に隣接する大型車による自車両への幅寄せ時(つまり、自車両の周辺に存在する物標としての大型車が、走行中の自車両に幅寄せする時)、走行可能な車線幅が減少する区間であって物標としての工事看板等が設置されている区間を自車両が走行する時、及び、走行可能な車線幅が減少する区間であって物標としての障害物が存在している区間を自車両が走行する時に、車両のふらつき挙動の学習が行われない。そのため、特許文献1に記載された技術では、そのような時(つまり、走行中の自車両の周辺に物標が存在する時であって、学習が行われていないシーンを自車両が走行する時)に、走行中の自車両のふらつきの有無を適切に判定できないおそれがある。
【0005】
上述した点に鑑み、本開示は、走行中の自車両のふらつきの有無を適切に判定することができるふらつき判定装置、ふらつき判定方法及びプログラムを提供することを目的とする。詳細には、本開示は、走行中の自車両の周辺に存在する物標を回避するための自車両の運転者による操作に伴う自車両の挙動が自車両のふらつきと誤って判定されるおそれを抑制することができるふらつき判定装置、ふらつき判定方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様は、自車両の走行中のふらつきの有無を判定するふらつき判定部を備え、走行中の前記自車両の周辺に物標が存在する場合であって、前記自車両の運転者の顔又は視線が前記物標に向けられている場合に、前記自車両と前記物標との位置関係に応じて、閾値変更部が前記自車両の走行中のふらつきの有無の判定に用いられるふらつき判定用閾値を変更するか、あるいは、前記ふらつき判定部が前記自車両の走行中のふらつきの有無の判定を停止する、ふらつき判定装置である。
【発明の効果】
【0007】
本開示によれば、走行中の自車両のふらつきの有無を適切に判定することができる。
【図面の簡単な説明】
【0008】
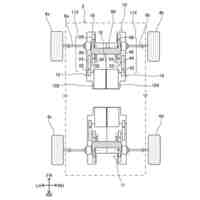
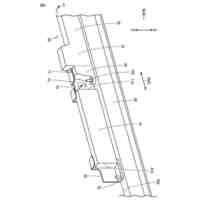
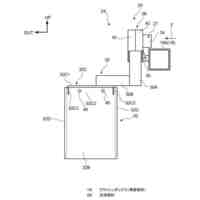
第1実施形態のふらつき判定装置18が適用された自車両1の一例を示す図である。
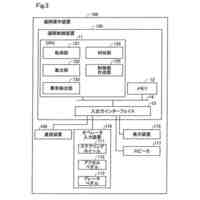
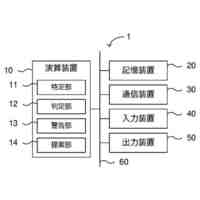
図1に示すふらつき判定装置18の具体的な構成の一例を示す図である。
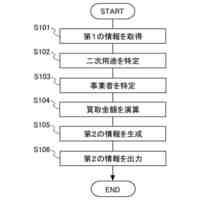
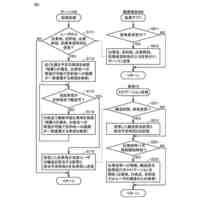
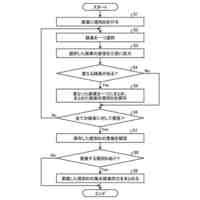
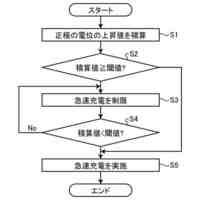
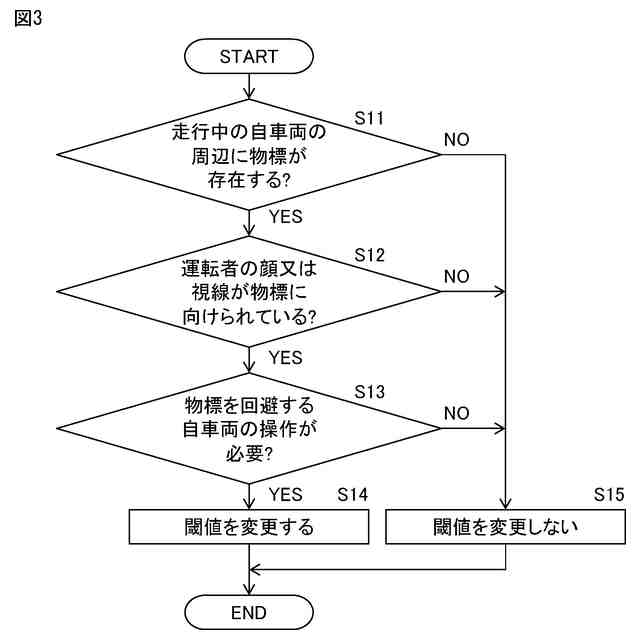
第1実施形態のふらつき判定装置18のプロセッサ18Cによって実行される処理の一例を説明するためのフローチャートである。
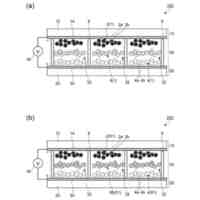
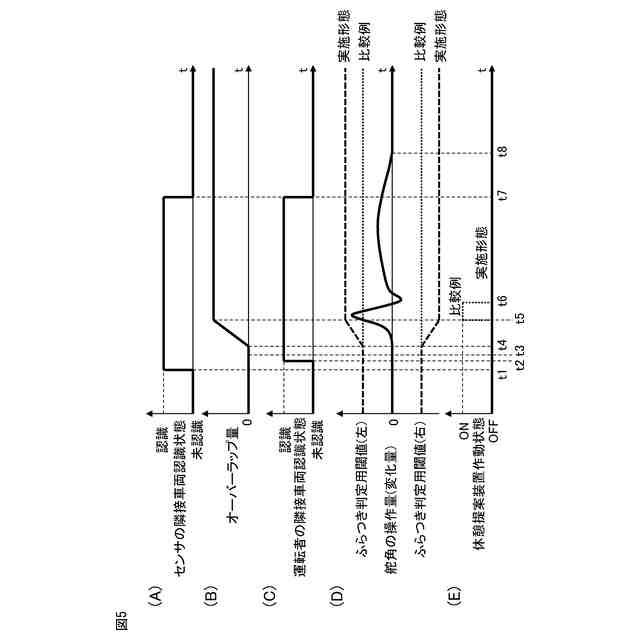
閾値変更部C5がふらつき判定用閾値を変更する具体例を説明するための図である。
閾値変更部C5がふらつき判定用閾値を変更する具体例を説明するための図である。
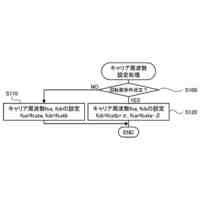
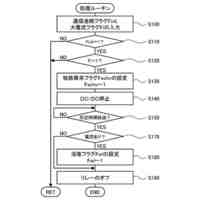
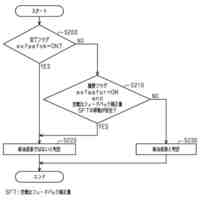
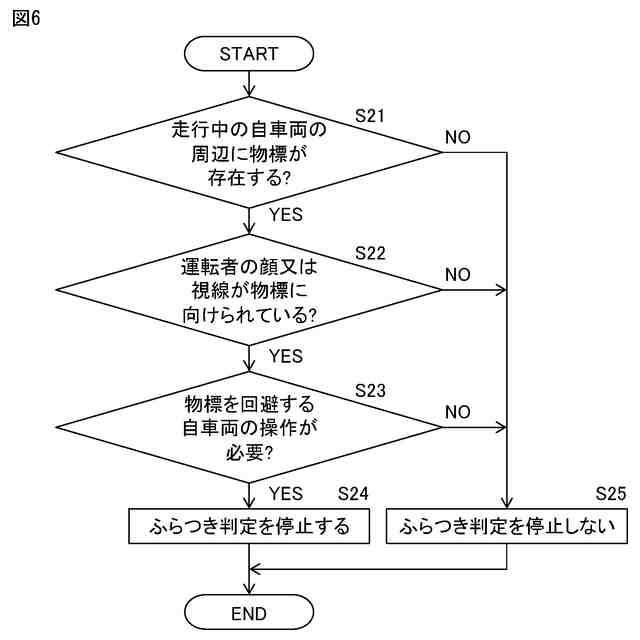
第2実施形態のふらつき判定装置18のプロセッサ18Cによって実行される処理の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0009】
以下、図面を参照し、本開示のふらつき判定装置、ふらつき判定方法及びプログラムの実施形態について説明する。
【0010】
<第1実施形態>
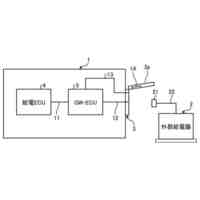
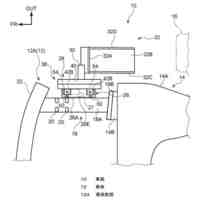
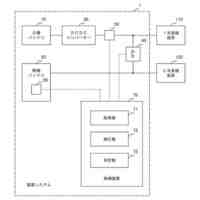
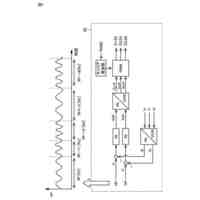
図1は第1実施形態のふらつき判定装置18が適用された自車両1の一例を示す図である。図2は図1に示すふらつき判定装置18の具体的な構成の一例を示す図である。
図1及び図2に示す例では、自車両1が、車両状態センサ11と、周辺状況センサ12と、位置情報取得装置13と、地図情報取得装置14と、ふらつき判定装置18とを備えている。
車両状態センサ11は、自車両1の状態を検出する。車両状態センサ11には、例えば車速センサ、ヨーレートセンサ、加速度センサ、舵角センサ、ステアトルクを検出するトルクセンサ等が含まれる。車両状態センサ11は、自車両1の状態の検出結果をふらつき判定装置18等に送信する。
周辺状況センサ12は、自車両1の周辺に存在する物標TG(図4参照)等を検出する。物標TGには、例えば周辺車両(例えば先行車両、隣接車両等)、落下物、ガードレール、障害物(例えば工事看板、事故処理車両等)、歩行者、走行路L(図4参照)内に設置された電柱、走行路Lの路面に設置された区画線(白線)LL、LR(図4参照)、路側物等が含まれる。周辺状況センサ12には、例えばカメラ、ライダー(LIDAR:Laser Imaging Detection and Ranging)、レーダー、ソナー等が含まれる。周辺状況センサ12は、自車両1の周辺に存在する物標TG等の検出結果をふらつき判定装置18等に送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
二次電池
今日
トヨタ自動車株式会社
接合方法
1日前
トヨタ自動車株式会社
二次電池
今日
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
プロテクタ
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
車両前部構造
今日
トヨタ自動車株式会社
配車システム
1日前
トヨタ自動車株式会社
電子ペーパー
今日
トヨタ自動車株式会社
車両用フード
今日
トヨタ自動車株式会社
車両前部構造
今日
トヨタ自動車株式会社
排気システム
3日前
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
画像処理方法
今日
トヨタ自動車株式会社
給油判定装置
今日
トヨタ自動車株式会社
電源システム
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
充電システム
2日前
トヨタ自動車株式会社
遊星歯車機構
今日
トヨタ自動車株式会社
電池システム
1日前
トヨタ自動車株式会社
パワーユニット
今日
トヨタ自動車株式会社
電極体及び電池
今日
トヨタ自動車株式会社
タンク固定構造
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ