TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025047743
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156421
出願日
2023-09-21
発明の名称
車両制御装置、制御方法、及び車両制御システム
出願人
日立Astemo株式会社
代理人
藤央弁理士法人
主分類
G08G
1/09 20060101AFI20250326BHJP(信号)
要約
【課題】遠隔制御が困難な場合であっても、確実に、車両の走行を制御する
【解決手段】車両制御装置は、所定の車両制御を実現するための制御情報を生成する制御アプリケーションを複数格納し、制御情報を生成する生成処理を実行可能な遠隔制御システムと通信可能に接続し、車両制御の種別ごとに、遠隔制御システムが生成処理を実行できるか否かを判定し、判定の結果を格納し、任意の車両制御の実行契機を検知した場合又は実行周期に達した場合、判定の結果に基づいて、遠隔制御システムが当該車両制御に対応する生成処理を実行できるか否かを判定し、遠隔制御システムが生成処理を実行できる場合、遠隔制御システムに生成処理の実行要求を送信し、遠隔制御システムが生成処理を実行できない場合、当該車両制御に対応する制御アプリケーションを実行する。
【選択図】 図6
特許請求の範囲
【請求項1】
プロセッサ及び前記プロセッサに接続されるメモリを備える車両制御装置であって、
前記メモリは、所定の車両制御を実現するための制御情報を生成する制御アプリケーションを複数格納し、
前記車両制御装置は、前記制御情報を生成する生成処理を実行可能な遠隔制御システムと通信可能に接続し、
前記プロセッサは、
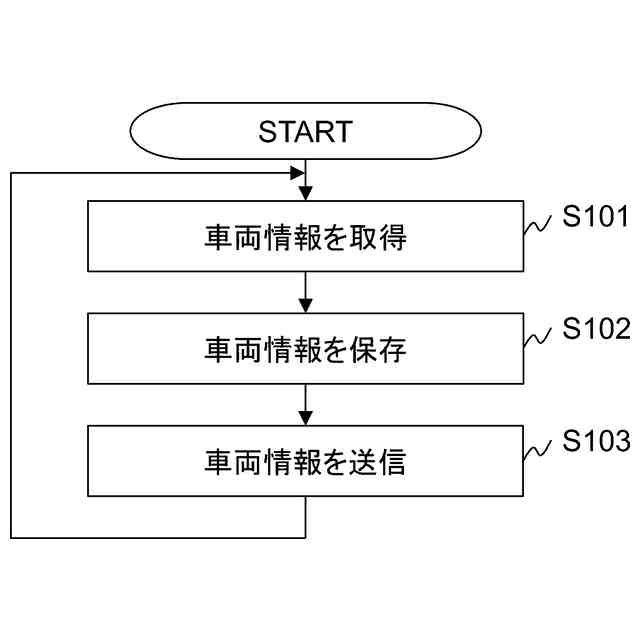
前記車両制御装置が搭載される車両の状態に関する値を含む車両情報を取得し、前記メモリに前記車両情報を格納し、
前記車両情報を前記遠隔制御システムに送信し、
前記車両制御の種別ごとに、前記遠隔制御システムが前記生成処理を実行できるか否かを判定し、前記メモリに前記判定の結果を格納し、
任意の前記車両制御の実行契機を検知した場合又は任意の前記車両制御の実行周期に達した場合、前記判定の結果に基づいて、前記遠隔制御システムが当該車両制御に対応する前記生成処理を実行できるか否かを判定し、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できる場合、前記遠隔制御システムに前記生成処理の実行要求を送信し、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できない場合、当該車両制御に対応する前記制御アプリケーションを実行することを特徴とする車両制御装置。
続きを表示(約 3,800 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記プロセッサは、前記遠隔制御システムに前記実行要求を送信した後、前記遠隔制御システムから一定期間内に前記制御情報を受信できない場合、実行契機が検知された又は実行周期に達した前記車両制御に対応する前記制御アプリケーションを実行することを特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置であって、
前記プロセッサは、前記メモリから、前記制御アプリケーションが用いる前記車両情報を取得することを特徴とする車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記メモリは、前記車両制御の種別ごとに、前記生成処理の制限時間を管理するための情報を格納し、
前記プロセッサは、
前記遠隔制御システムが前記生成処理を実行可能な状態であるか否かを判定し、
前記遠隔制御システムが前記生成処理を実行可能な状態でない場合、前記遠隔制御システムが前記生成処理を実行できないと判定し、
前記遠隔制御システムが前記生成処理を実行可能な状態である場合、前記生成処理の処理時間を特定し、
前記処理時間が前記制限時間より大きいか否かを判定し、
前記処理時間が前記制限時間より大きい場合、前記遠隔制御システムが前記生成処理を実行できないと判定し、
前記処理時間が前記制限時間以下の場合、前記遠隔制御システムが前記生成処理を実行できると判定することを特徴とする車両制御装置。
【請求項5】
請求項1に記載の車両制御装置であって、
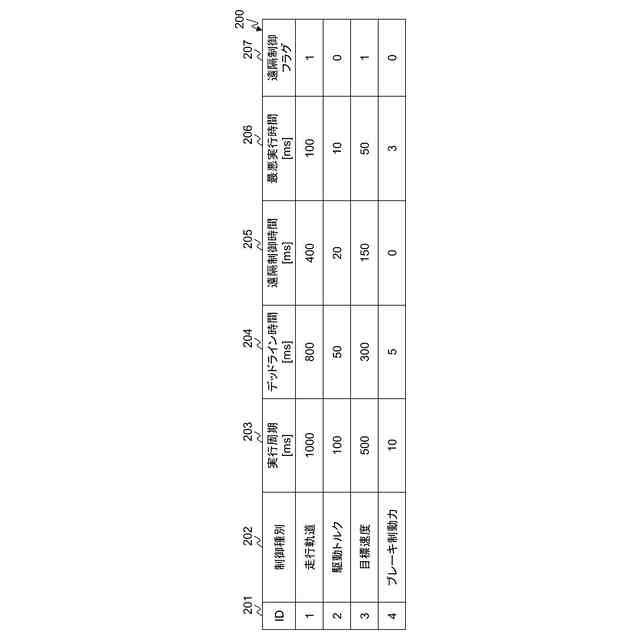
前記メモリは、前記車両制御の種別ごとに、前記車両制御を完了すべき時間を示すデッドライン時間と、前記生成処理の制限時間と、を関連付けて管理するための情報を格納し、
前記プロセッサは、
前記遠隔制御システムが前記生成処理を実行可能な状態であるか否かを判定し、
前記遠隔制御システムが前記生成処理を実行可能な状態でない場合、前記遠隔制御システムが前記生成処理を実行できないと判定し、
前記遠隔制御システムが前記生成処理を実行可能な状態である場合、前記生成処理の処理時間を特定し、
前記処理時間が、前記制限時間より大きいか否かを判定し、
前記処理時間が前記制限時間より大きい場合、前記遠隔制御システムが前記生成処理を実行できないと判定し、
前記処理時間が前記制限時間以下の場合、前記実行要求の送信後、前記車両制御に対応する前記制御アプリケーションを実行した場合の前記制御情報の生成に要する予測終了時間が前記デッドライン時間より大きいか否かを判定し、
前記予測終了時間が前記デッドライン時間より大きい場合、前記遠隔制御システムが前記生成処理を実行できないと判定し、
前記予測終了時間が前記デッドライン時間以下の場合、前記遠隔制御システムが前記生成処理を実行できると判定することを特徴とする車両制御装置。
【請求項6】
請求項1に記載の車両制御装置であって、
前記プロセッサは、前記車両制御の種別ごとに、異なる実行周期で、前記遠隔制御システムが前記生成処理を実行できるか否かを判定することを特徴とする車両制御装置。
【請求項7】
プロセッサ及び前記プロセッサに接続されるメモリを有する車両制御装置が実行する制御方法であって、
前記メモリは、所定の車両制御を実現するための制御情報を生成する制御アプリケーションを複数格納し、
前記車両制御装置は、前記制御情報を生成する生成処理を実行可能な遠隔制御システムと通信可能に接続し、
前記制御方法は、
前記プロセッサが、前記車両制御装置が搭載される車両の状態に関する値を含む車両情報を取得し、前記メモリに前記車両情報を格納する第1のステップと、
前記プロセッサが、前記車両情報を前記遠隔制御システムに送信する第2のステップと、
前記プロセッサが、前記車両制御の種別ごとに、前記遠隔制御システムが前記生成処理を実行できるか否かを判定し、前記メモリに前記判定の結果を格納する第3のステップと、
任意の前記車両制御の実行契機を検知された場合又は任意の前記車両制御の実行周期に達した場合、前記プロセッサが、前記判定の結果に基づいて、前記遠隔制御システムが当該車両制御に対応する前記生成処理を実行できるか否かを判定する第4のステップと、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できる場合、前記プロセッサが、前記遠隔制御システムに前記生成処理の実行要求を送信する第5のステップと、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できない場合、前記プロセッサが、当該車両制御に対応する前記制御アプリケーションを実行する第6のステップと、
を含むことを特徴とする制御方法。
【請求項8】
請求項7に記載の制御方法であって、
前記第5のステップは、前記プロセッサが、前記遠隔制御システムに前記実行要求を送信した後、前記遠隔制御システムから一定期間内に前記制御情報を受信できない場合、実行契機が検知された又は実行周期に達した前記車両制御に対応する前記制御アプリケーションを実行する第7のステップを含むことを特徴とする制御方法。
【請求項9】
請求項7に記載の制御方法であって、
前記メモリは、前記車両制御の種別ごとに、前記車両制御を完了すべき時間を示すデッドライン時間と、前記生成処理の制限時間と、を関連付けて管理するための情報を格納し、
前記第4のステップは、
前記プロセッサが、前記遠隔制御システムが前記生成処理を実行可能な状態であるか否かを判定するステップと、
前記遠隔制御システムが前記生成処理を実行可能な状態でない場合、前記プロセッサが、前記遠隔制御システムが前記生成処理を実行できないと判定するステップと、
前記遠隔制御システムが前記生成処理を実行可能な状態である場合、前記プロセッサが、前記生成処理の処理時間を特定するステップと、
前記プロセッサが、前記処理時間が前記制限時間より大きいか否かを判定するステップと、
前記処理時間が前記制限時間より大きい場合、前記プロセッサが、前記遠隔制御システムが前記生成処理を実行できないと判定するステップと、
前記処理時間が前記制限時間以下の場合、前記プロセッサが、前記実行要求の送信後、前記車両制御に対応する前記制御アプリケーションを実行した場合の前記制御情報の生成に要する予測終了時間が前記デッドライン時間より大きいか否かを判定するステップと、
前記予測終了時間が前記デッドライン時間より大きい場合、前記プロセッサが、前記遠隔制御システムが前記生成処理を実行できないと判定するステップと、
前記予測終了時間が前記デッドライン時間以下の場合、前記プロセッサが、前記遠隔制御システムが前記生成処理を実行できると判定するステップと、を含むことを特徴とする制御方法。
【請求項10】
車両制御装置及び遠隔制御システムを備える車両制御システムであって、
前記車両制御装置は、プロセッサ及び前記プロセッサに接続されるメモリを有し、
前記メモリは、所定の車両制御を実現するための制御情報を生成する制御アプリケーションを複数格納し、
前記遠隔制御システムは、前記制御情報を生成する生成処理を実行可能であって、
前記車両制御装置は、
前記車両制御装置が搭載される車両の状態に関する値を含む車両情報を取得し、前記メモリに前記車両情報を格納し、
前記車両情報を前記遠隔制御システムに送信し、
前記車両制御の種別ごとに、前記遠隔制御システムが前記生成処理を実行できるか否かを判定し、前記メモリに前記判定の結果を格納し、
任意の前記車両制御の実行契機を検知した場合又は任意の前記車両制御の実行周期に達した場合、前記判定の結果に基づいて、前記遠隔制御システムが当該車両制御に対応する前記生成処理を実行できるか否かを判定し、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できる場合、前記遠隔制御システムに前記生成処理の実行要求を送信し、
実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できない場合、当該車両制御に対応する前記制御アプリケーションを実行し、
前記遠隔制御システムは、
前記実行要求を受信した場合、実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を実行することによって、前記制御情報を生成し、
前記車両制御装置に前記制御情報を送信することを特徴とする車両制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
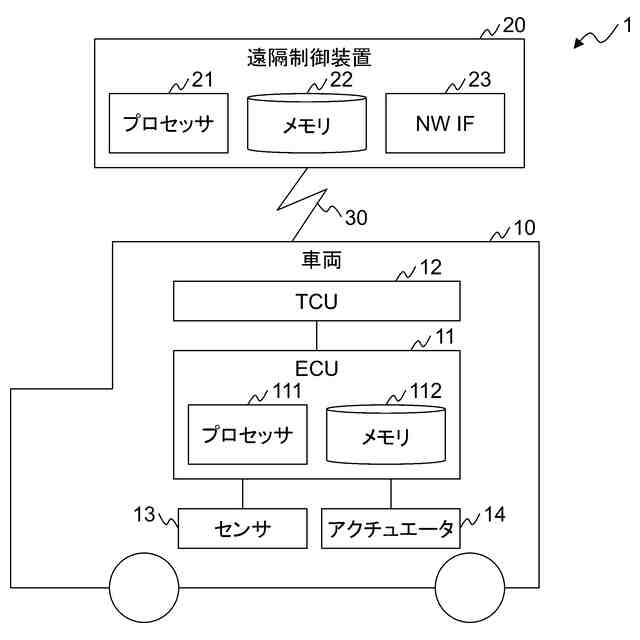
本発明は、遠隔制御装置から送信された制御情報に基づいて車両を制御する車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
自動車分野において、車両の走行状態を管理するためのセンサ及びアクチュエータなどの制御を行う電子制御装置が広く用いられている。近年の自動運転技術、動力の電動化などの技術の発展に伴い電子制御装置に求められる機能が増大しており、車両外部の遠隔制御装置を用いた高機能化のニーズが高まっている。
【0003】
例えば、特許文献1には、自動運転車両から遠隔指示装置に対して遠隔指示要求を送信し、遠隔指示装置から送信された遠隔指示に基づいて自動運転車両の走行を制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-33612号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、遠隔指示装置及び自動運転車両の間の通信に遅延が生じている場合、自動運転車両は遠隔指示を拒絶することによって、適切ではない遠隔指示に基づく自動運転車両の走行制御を抑制している。
【0006】
しかし、遠隔指示を拒絶した場合、外界の情報を含む車両情報に基づいた車両制御が実施されないことになる。そのため、周辺の道路状況など、外界の変化に対応できない場合がある。
【0007】
本発明は、遠隔制御が困難な場合であっても、確実に、車両の走行を制御する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、プロセッサ及び前記プロセッサに接続されるメモリを備える車両制御装置であって、前記メモリは、所定の車両制御を実現するための制御情報を生成する制御アプリケーションを複数格納し、前記車両制御装置は、前記制御情報を生成する生成処理を実行可能な遠隔制御システムと通信可能に接続し、前記プロセッサは、前記車両制御装置が搭載される車両の状態に関する値を含む車両情報を取得し、前記メモリに前記車両情報を格納し、前記車両情報を前記遠隔制御システムに送信し、前記車両制御の種別ごとに、前記遠隔制御システムが前記生成処理を実行できるか否かを判定し、前記メモリに前記判定の結果を格納し、任意の前記車両制御の実行契機を検知した場合又は任意の前記車両制御の実行周期に達した場合、前記判定の結果に基づいて、前記遠隔制御システムが当該車両制御に対応する前記生成処理を実行できるか否かを判定し、実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できる場合、前記遠隔制御システムに前記生成処理の実行要求を送信し、実行契機が検知された又は実行周期に達した前記車両制御に対応する前記生成処理を前記遠隔制御システムが実行できない場合、当該車両制御に対応する前記制御アプリケーションを実行する。
【発明の効果】
【0009】
本発明によれば、遠遠隔制御が困難な場合であっても、確実に、車両の走行を制御できる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
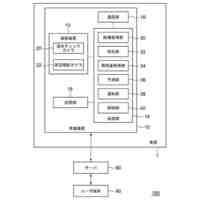
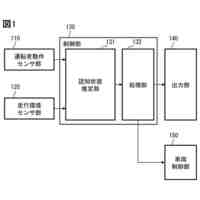
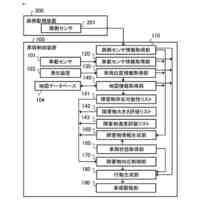
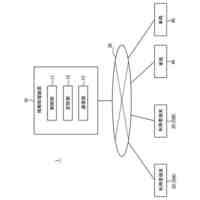
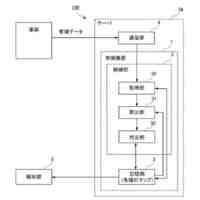
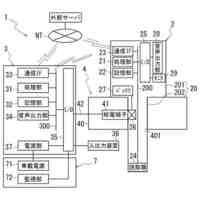
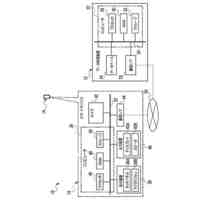
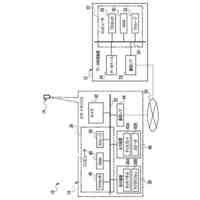
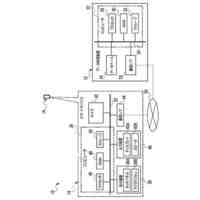
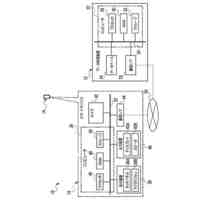
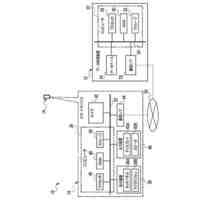
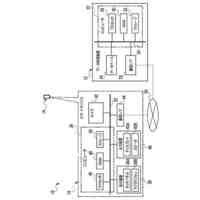
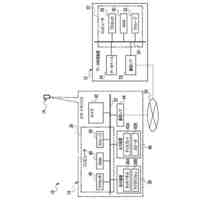
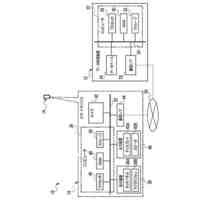
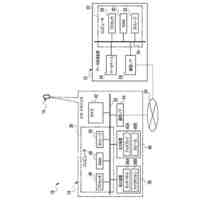
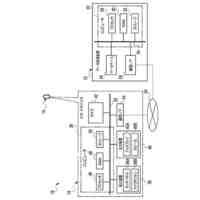
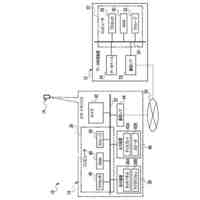
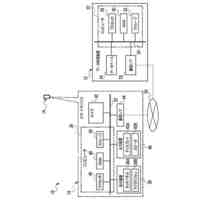
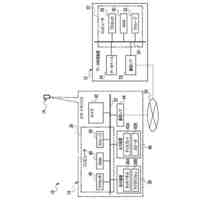
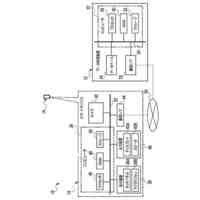
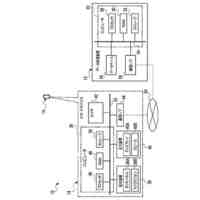
実施例1の車両制御システムの構成の一例を示す図である。
実施例1の車両制御管理情報のデータ構造の一例を示す図である。
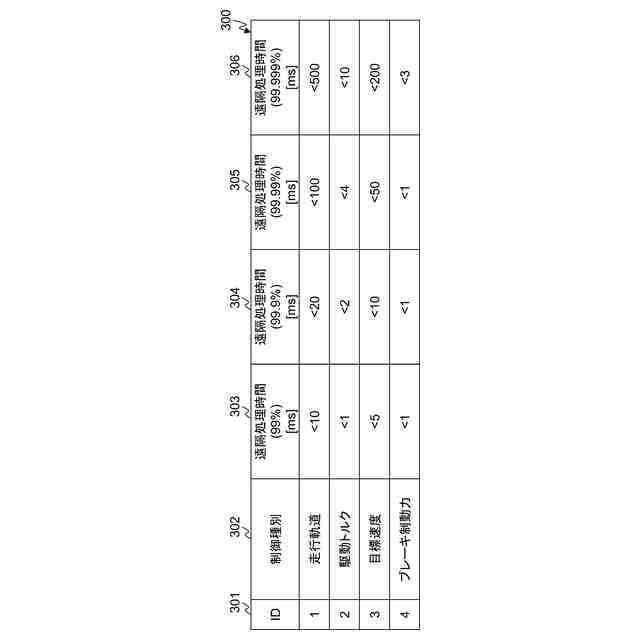
実施例1の遠隔処理時間情報のデータ構造の一例を示す図である。
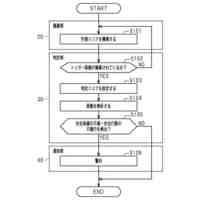
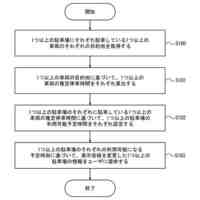
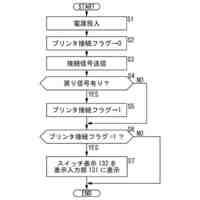
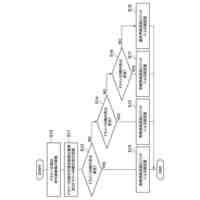
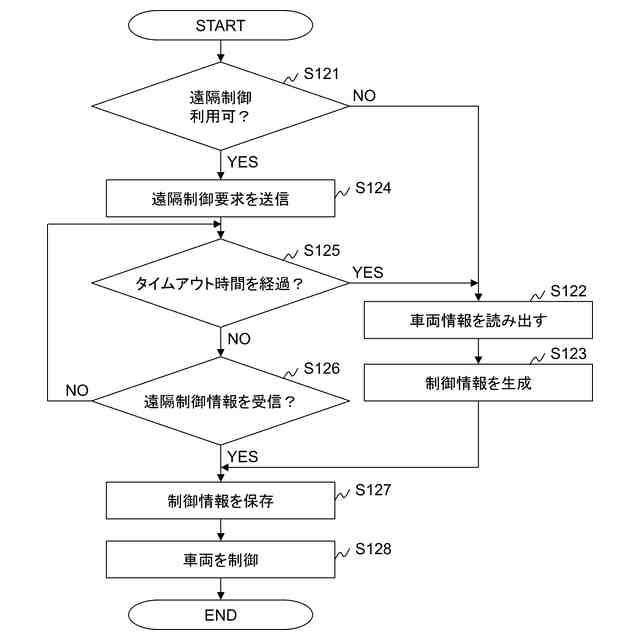
実施例1のECUが実行する処理の一例を説明するフローチャートである。
実施例1のECUが実行する処理の一例を説明するフローチャートである。
実施例1のECUが実行する処理の一例を説明するフローチャートである。
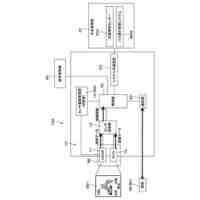
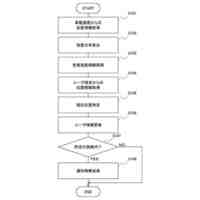
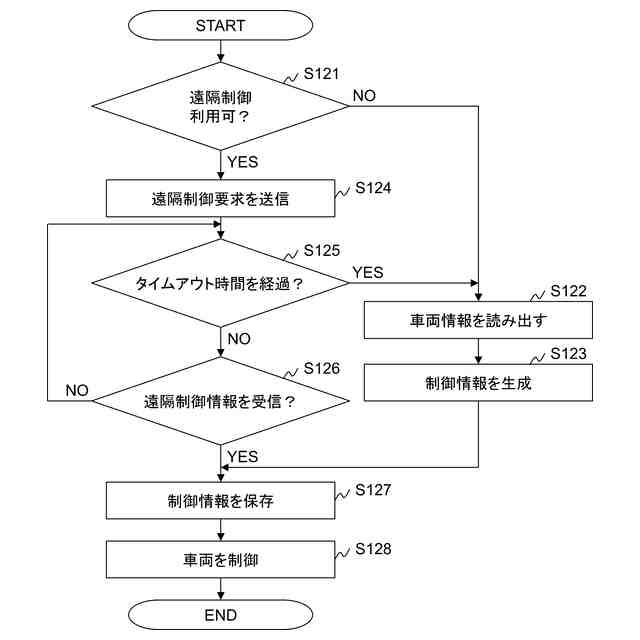
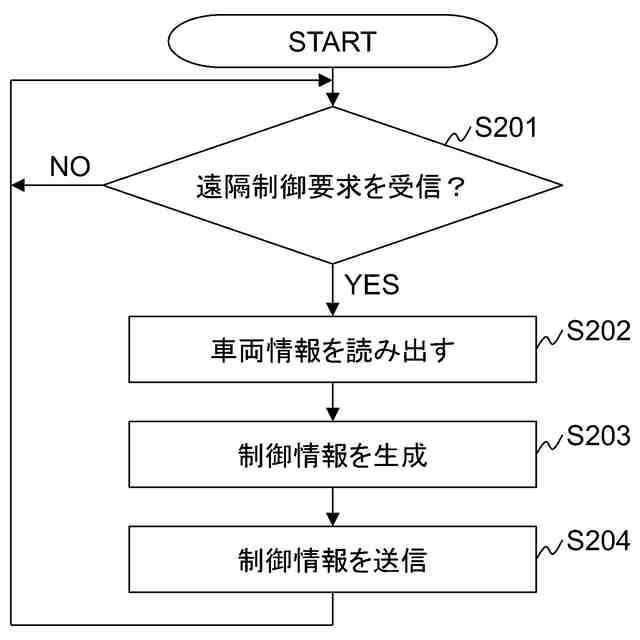
実施例1の遠隔制御装置が実行する遠隔制御処理の一例を説明するフローチャートである。
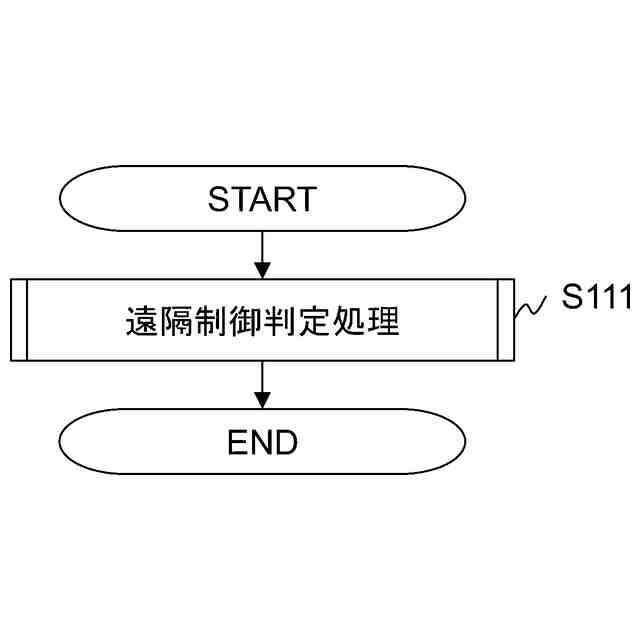
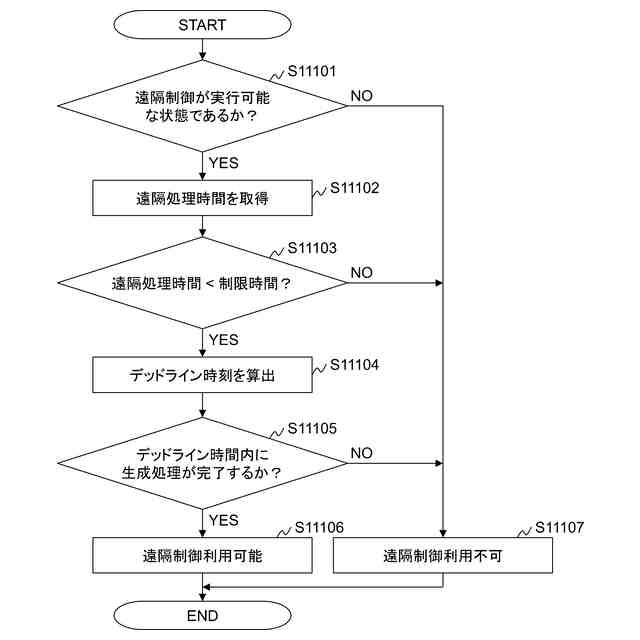
実施例1のECUが実行する遠隔制御判定処理の一例を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ホーチキ株式会社
監視システム
4日前
株式会社JVCケンウッド
通知システム
2日前
タック株式会社
安全監視システム
2日前
日本信号株式会社
路側装置及びセンサ装置
5日前
株式会社デンソー
運転支援装置
10日前
トヨタ自動車株式会社
方法
9日前
エムケー精工株式会社
信号機および信号機の発光制御方法
10日前
三菱電機株式会社
車両制御装置
13日前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
2日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
4日前
いすゞ自動車株式会社
システム
2日前
能美防災株式会社
火災受信機
9日前
トヨタ自動車株式会社
情報処理装置
5日前
トヨタ自動車株式会社
情報処理装置
2日前
株式会社JVCケンウッド
情報処理装置及び情報処理方法
2日前
トヨタ自動車株式会社
認識支援システム
5日前
ジヤトコ株式会社
置き去り防止装置
9日前
日産自動車株式会社
情報処理装置及び情報処理方法
9日前
トヨタ自動車株式会社
ドライバ監視システム
11日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
4日前
ソフトバンクグループ株式会社
システム
5日前
ソフトバンクグループ株式会社
システム
5日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
2日前
ソフトバンクグループ株式会社
システム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ