TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042166
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149017
出願日
2023-09-14
発明の名称
移動機の移動制御システム及び移動機の移動制御方法
出願人
住友重機械プロセス機器株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250319BHJP(制御;調整)
要約
【課題】本開示は、停止位置の誤差を低減することが可能な移動機の移動制御システムを提供することを目的の一つとしている。
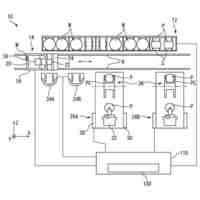
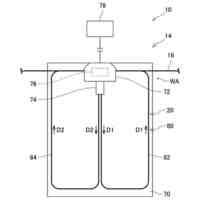
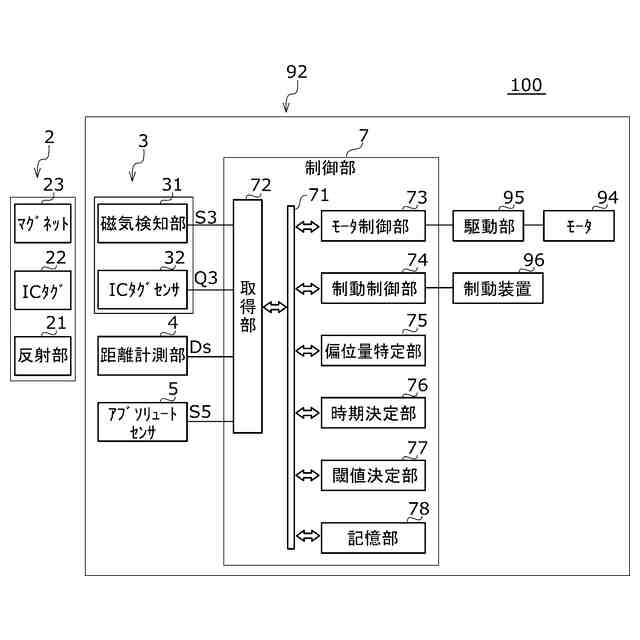
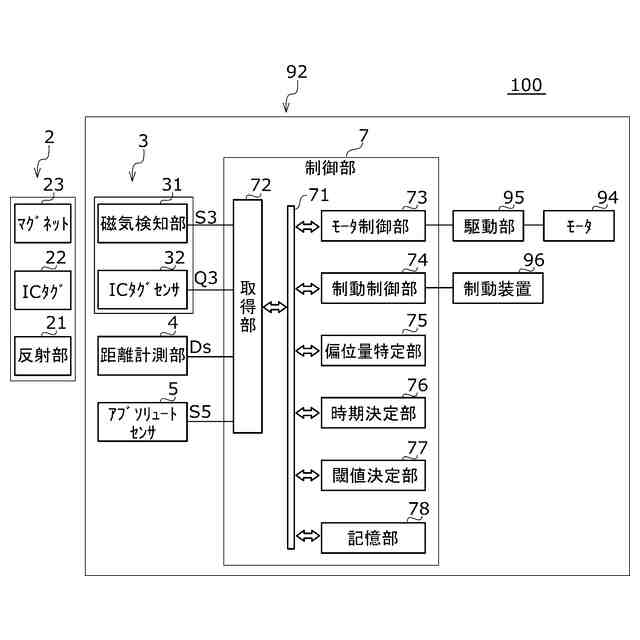
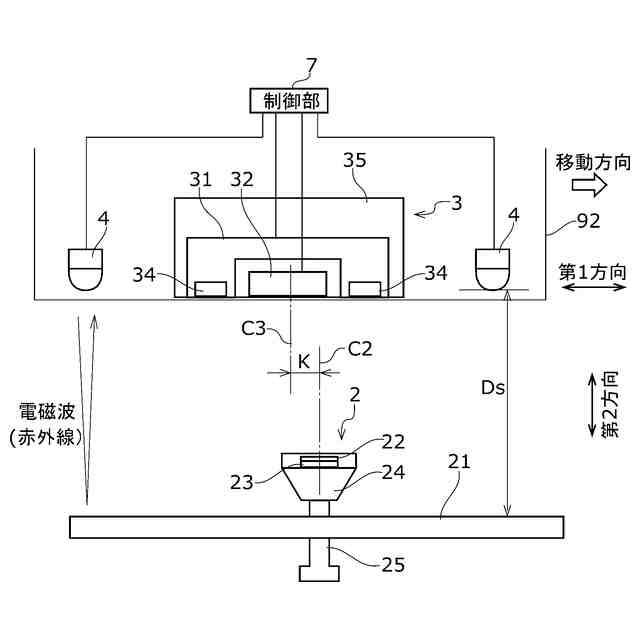
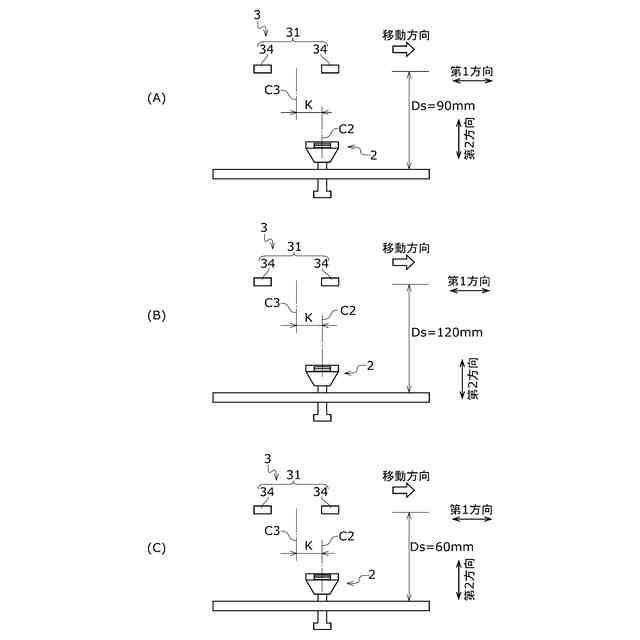
【解決手段】本開示の移動制御システム100は、複数の窯90に沿って第1方向に延びる移動路91を移動する移動機92を制御する移動制御システムであって、第1方向に所定の間隔で設置される複数の被検知体2と、移動機92に搭載され、被検知体2を検知する検知ユニット3と、被検知体2と検知ユニット3の間の離隔距離Dsを計測する距離計測部4と、検知ユニット3の検知結果と、距離計測部4の計測結果と、を用いて移動機92を停止させるための制動開始時期Tsを定める制御部7と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
複数の窯に沿って第1方向に延びる移動路を移動する移動機を制御する移動制御システムであって、
前記第1方向に所定の間隔で設置される複数の被検知体と、
前記移動機に搭載され、前記被検知体を検知する検知ユニットと、
前記被検知体と前記検知ユニットの間の離隔距離を計測する距離計測部と、
前記検知ユニットの検知結果と、前記距離計測部の計測結果と、を用いて前記移動機を停止させるための制動開始時期を定める制御部と、
を備える移動制御システム。
続きを表示(約 690 文字)
【請求項2】
前記検知ユニットは、前記被検知体の検知状態に応じた検知信号を提供し、
前記制御部は、前記検知信号と、前記距離計測部で計測された前記離隔距離と、閾値とを用いて前記制動開始時期を定める、請求項1に記載の移動制御システム。
【請求項3】
前記制御部は、被検知体に対応する修正値を記憶する記憶部を有し、前記記憶部に記憶された前記修正値に応じて前記閾値を変更する、請求項2に記載の移動制御システム。
【請求項4】
前記被検知体は反射部を有し、
前記距離計測部は、前記反射部で反射された電磁波を検知し、その検知結果に応じて前記離隔距離を特定する、請求項1に記載の移動制御システム。
【請求項5】
前記距離計測部は、前記第1方向に間隔をあけて複数配置される、請求項4に記載の移動制御システム。
【請求項6】
前記複数の距離計測部は、前記検知ユニットを前記第1方向に挟んで配置される、請求項5に記載の移動制御システム。
【請求項7】
複数の窯に沿って第1方向に延びる移動路を移動する移動機の移動制御方法であって、
前記移動機に搭載される検知ユニットによって、前記第1方向に所定の間隔で設置される複数の被検知体を検知する検知ステップと、
前記被検知体と前記検知ユニットの間の距離を計測する計測ステップと、
前記検知ステップの検知結果と、前記計測ステップの計測結果と、を用いて前記移動機を停止させるための制動開始時期を定めるステップと、
を含む移動制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、コークス炉用の移動機の移動制御システム及び移動機の移動制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
コークス炉において複数の窯に沿って設けられるレール上を走行する移動機が知られている。本出願人は、特許文献1により、コークス炉の移動機械の移動制御装置を開示した。この制御装置は、位置センサによって移動機械の走行方向での位置を検出する位置検出部と、移動機械を目的位置に停止させる停止指令部とを備え、移動機械の離接方向ずれ量に応じて停止位置を補正する。
【先行技術文献】
【特許文献】
【0003】
特開2014-219935号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動機の移動制御システムは、移動機をレール上に左右方向に移動させるとともに、目標の窯前の窯芯位置(目標位置)に停止させるように制御する。移動機は制動開始から停止するまでの間に一定の制動距離を移動するため、システムは目標位置よりも手前で制動を開始するように制御する。このため、システムは目標位置を予測し、その予測結果に基づいて制動を開始する。しかし、経年変化等によりシステムの特性が変化すると、目標位置の予測精度が低下し、停止位置の誤差が増大する。
【0005】
本発明は、このような課題に鑑みてなされたもので、停止位置の誤差を低減することが可能な移動機の移動制御システムを提供することを目的の一つとしている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の移動制御システムは、複数の窯に沿って第1方向に延びる移動路を移動する移動機を制御する移動制御システムであって、第1方向に所定の間隔で設置される複数の被検知体と、移動機に搭載され、被検知体を検知する検知ユニットと、被検知体と検知ユニットの間の離隔距離を計測する距離計測部と、検知ユニットの検知結果と、距離計測部の計測結果と、を用いて移動機を停止させるための制動開始時期を定める制御部と、を備える。
【0007】
本発明の別の態様は、移動制御方法である。この方法は、複数の窯に沿って第1方向に延びる移動路を移動する移動機の移動制御方法であって、移動機に搭載される検知ユニットによって、第1方向に所定の間隔で設置される複数の被検知体を検知する検知ステップと、被検知体と検知ユニットの間の距離を計測する計測ステップと、検知ステップの検知結果と、計測ステップの計測結果と、を用いて移動機を停止させるための制動開始時期を定めるステップと、を含む。
【0008】
なお、以上の構成要素の任意の組み合わせや、本発明の構成要素や表現を方法、システムなどの間で相互に置換したものもまた、本発明の態様として有効である。
【発明の効果】
【0009】
本発明によれば、停止位置の誤差を低減することが可能な移動機の移動制御システムを提供できる。
【図面の簡単な説明】
【0010】
実施形態に係る移動制御システムを模式的に示す平面図である。
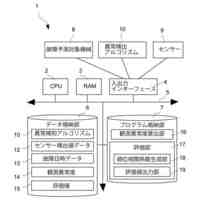
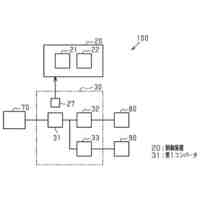
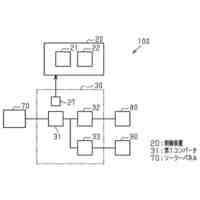
図1の移動制御システムを示すブロック図である。
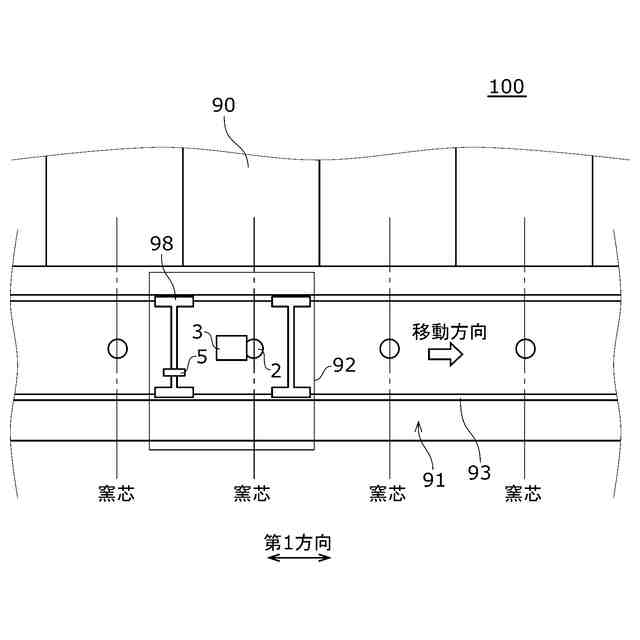
被検知体、検知ユニット及び距離計測部の一例を示す側面図である。
被検知体と磁気検知ユニットの位置関係を示す図である。
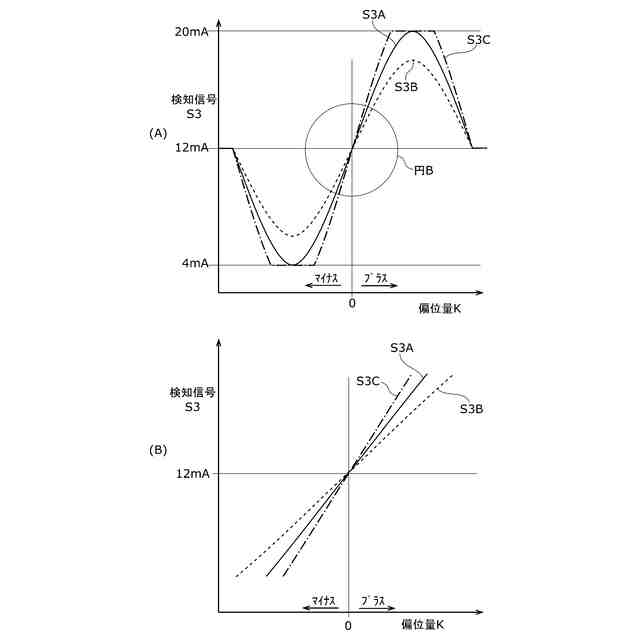
被検知体の偏位量と検知信号の関係を示す図である。
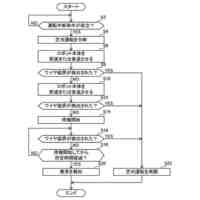
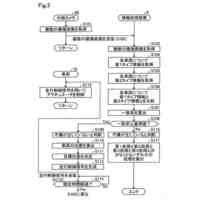
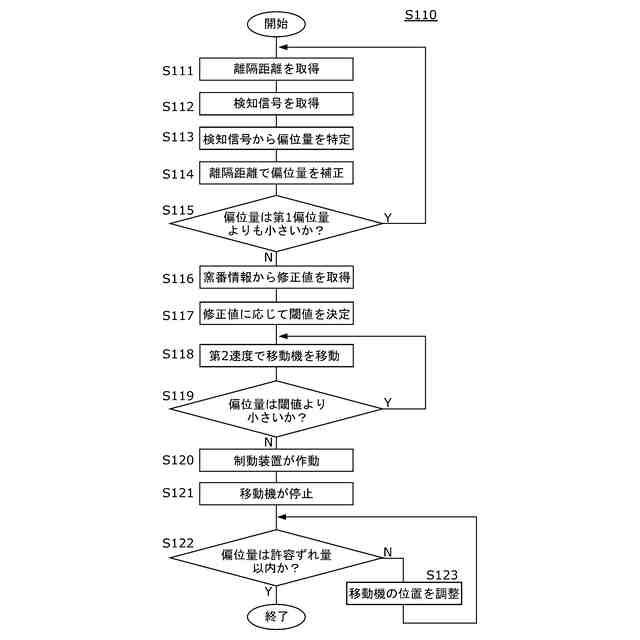
図1の移動制御システムの動作の一例を示すフローチャートである。
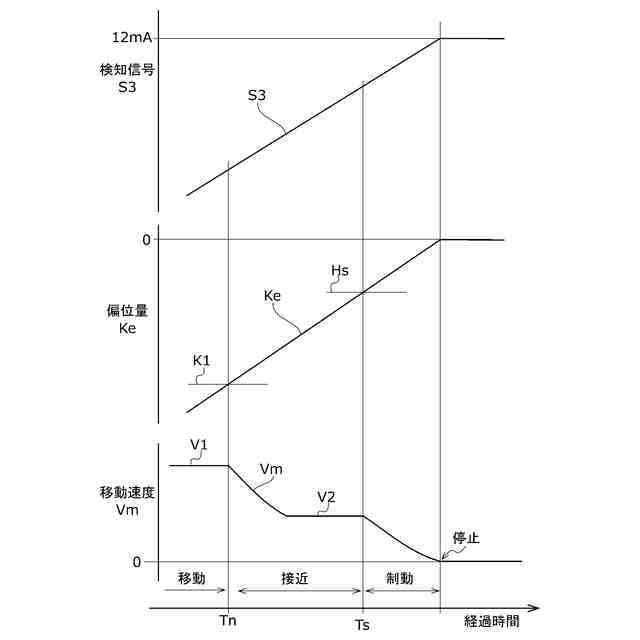
移動制御システムの動作の一例を示すタイムチャートである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
7日前
スター精密株式会社
工作機械
23日前
ローム株式会社
半導体集積回路
2日前
愛知機械テクノシステム株式会社
無人搬送車
16日前
国立大学法人広島大学
モデル誤差抑制補償器
28日前
アズビル株式会社
制御システムおよび制御方法
8日前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
8日前
トヨタ自動車株式会社
自律走行装置
28日前
日本精工株式会社
制御装置および制御方法
14日前
チームラボ株式会社
走行システム及び走行路
21日前
ミツミ電機株式会社
電源回路及びその起動方法
28日前
村田機械株式会社
稼働監視システム及び稼働監視方法
17日前
日本精工株式会社
制御システムおよび制御方法
28日前
ローム株式会社
半導体装置
28日前
トヨタ自動車株式会社
群制御システム及び群制御方法
16日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
今日
ミツミ電機株式会社
多方向入力装置
今日
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
今日
ミツミ電機株式会社
多方向入力装置
今日
ミツミ電機株式会社
多方向入力装置
今日
HEROZ株式会社
異常検知アルゴリズムの評価システム
16日前
株式会社マキタ
作業ロボット
22日前
ローム株式会社
レギュレータ回路
1日前
株式会社TMEIC
リモートI/Oステーション
8日前
岩井ファルマテック株式会社
監査証跡の管理システム
3日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
22日前
株式会社牧野フライス製作所
生産システム
9日前
トヨタ自動車株式会社
情報処理装置
18日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
18日前
株式会社マキタ
自律移動システム
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ