TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025041787
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2024226263,2022150582
出願日
2024-12-23,2022-09-21
発明の名称
車両用制御装置及び車両用制御方法
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
B60W
30/09 20120101AFI20250318BHJP(車両一般)
要約
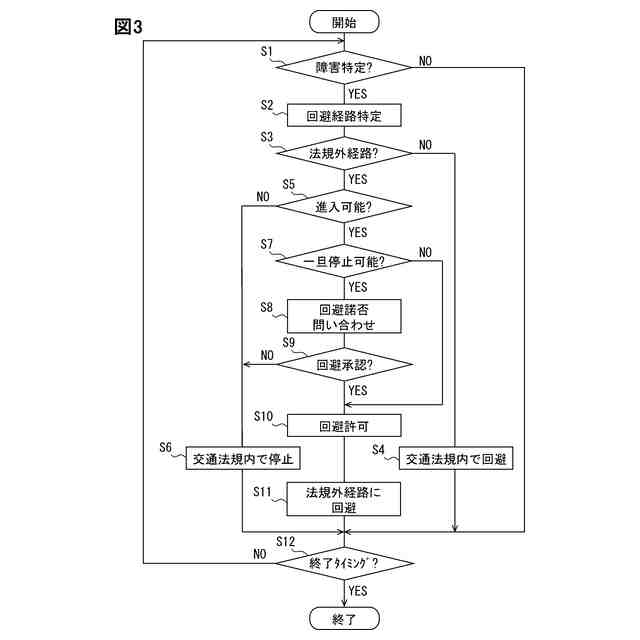
【課題】自動運転中に障害の回避が必要な場合であって、且つ、交通法規内の行動では回避が困難な場合であっても、障害の回避を自動でより円滑に行わせることを可能にする。
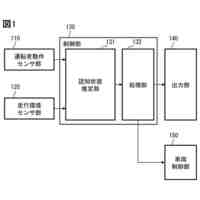
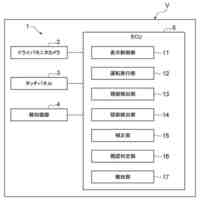
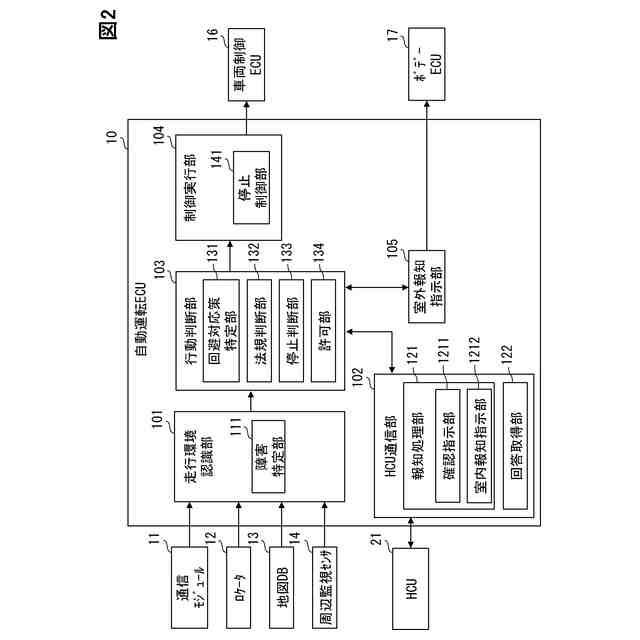
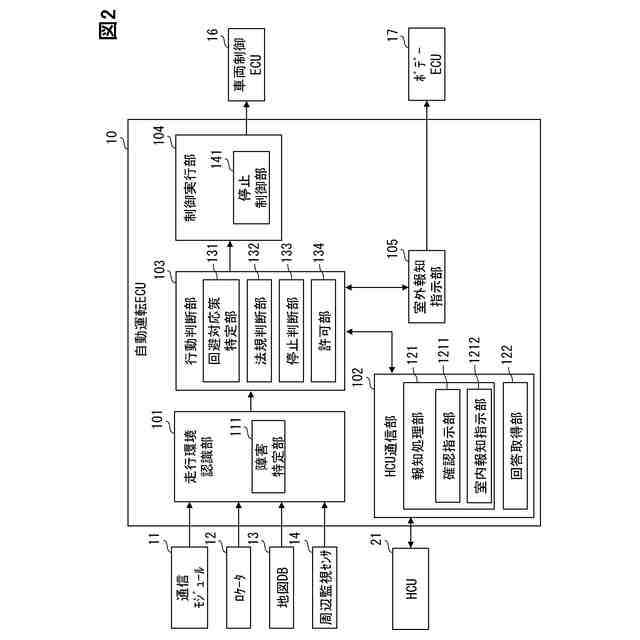
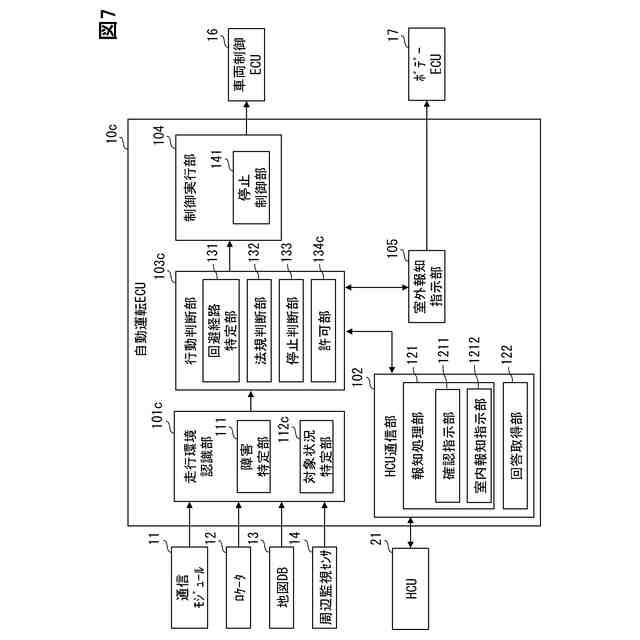
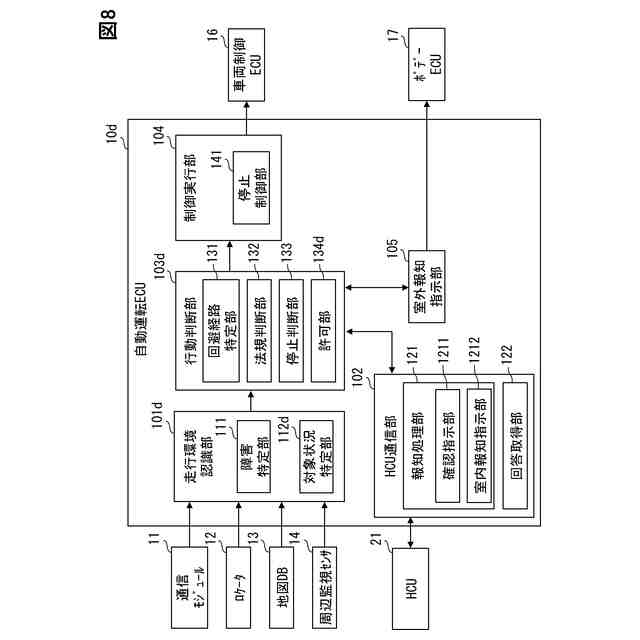
【解決手段】監視義務なし自動運転を実施する車両で用いることが可能な自動運転ECU10であって、自車の走行を妨げる障害を特定する障害特定部111と、障害特定部111で障害を特定した場合に、障害を回避可能な自車の経路である回避経路を特定する回避対応策特定部131と、監視義務なし自動運転中に、回避対応策特定部131で特定する回避経路が交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する許可部134とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行を妨げる障害を特定する障害特定部(111,111a)と、
前記障害特定部で前記障害を特定した場合に、前記障害を回避可能な前記車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、
前記監視義務なし自動運転中に、前記回避対応策特定部で特定する前記回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)とを備え、
前記回避対応策特定部(131)は、前記障害特定部で前記障害を特定した場合に、前記回避対応策として、前記障害を回避可能な前記車両の経路である回避経路を特定するものであり、
前記第1許可部(134)は、前記監視義務なし自動運転中に、前記回避対応策特定部で特定する前記回避経路が、前記逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、
前記回避対応策特定部で特定する前記回避経路が前記法規外経路である場合であって、且つ、前記車両の一旦停止が可能な場合に、前記車両を一旦停止させる停止制御部(141)と、
前記回避対応策特定部で特定する前記回避経路が前記法規外経路である場合であって、且つ、前記車両の一旦停止が可能な場合に、前記車両の運転者に向けて前記法規外経路への回避の諾否を問い合わせさせる確認指示部(1211)と、
前記確認指示部で問い合わせさせた前記諾否に対する前記運転者からの回答を取得する回答取得部(122)とを備え、
前記第1許可部は、前記回避対応策特定部で特定する前記回避経路が前記法規外経路である場合であって、且つ、前記車両の一旦停止が可能な場合には、前記回答取得部で前記法規外経路への回避を承諾する回答を取得した場合に、その法規外経路への回避を許可する車両用制御装置。
続きを表示(約 2,800 文字)
【請求項2】
請求項1に記載の車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(101)を備え、
前記第1許可部は、前記回避対応策特定部で特定する前記回避経路が前記法規外経路であって、且つ、前記車両の走行車線の対向車線若しくは道路端への進入が必要な経路である場合には、前記走行環境特定部でその進入先に他車両及び歩行者が存在しないことを特定していることをもとに、その法規外経路への回避を許可する車両用制御装置。
【請求項3】
請求項1に記載の車両用制御装置であって、
前記第1許可部は、前記回避対応策特定部で特定する前記回避経路が交通法規の範囲を外れる法規外経路である場合であって、且つ、前記車両の一旦停止が可能でない場合には、前記確認指示部での前記諾否の問い合わせなしに、その法規外経路への回避を許可する車両用制御装置。
【請求項4】
請求項1に記載の車両用制御装置であって、
前記監視義務なし自動運転のうちの前記車両の運転者の睡眠が許可される睡眠許可自動運転を実施する車両で用いることが可能であり、
前記第1許可部は、前記睡眠許可自動運転中に、前記回避対応策特定部で特定する前記回避経路が前記法規外経路であることをもとに、その法規外経路への回避を許可する車両用制御装置。
【請求項5】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行を妨げる障害を特定する障害特定部(111,111a)と、
前記障害特定部で前記障害を特定した場合に、前記障害を回避可能な前記車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、
前記監視義務なし自動運転中に、前記回避対応策特定部で特定する前記回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)とを備え、
前記回避対応策特定部(131)は、前記障害特定部で前記障害を特定した場合に、前記回避対応策として、前記障害を回避可能な前記車両の経路である回避経路を特定するものであり、
前記第1許可部(134)は、前記監視義務なし自動運転中に、前記回避対応策特定部で特定する前記回避経路が、前記逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、
前記監視義務なし自動運転のうちの前記車両の運転者の睡眠が許可される睡眠許可自動運転と前記運転者の睡眠が許可されない睡眠不許可自動運転とを少なくとも実施する車両で用いることが可能であり、
睡眠許可自動運転と睡眠不許可自動運転との自動化レベルの違いで交通法の範囲を外れる領域が異なるものであり、
前記第1許可部は、前記睡眠許可自動運転中の場合には、前記回避対応策特定部で特定する前記回避経路が、前記睡眠許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する一方、前記睡眠不許可自動運転中の場合には、前記回避対応策特定部で特定する前記回避経路が、前記睡眠不許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する車両用制御装置。
【請求項6】
請求項5に記載の車両用制御装置であって、
前記車両の走行環境を特定する走行環境特定部(101)を備え、
前記第1許可部は、前記回避対応策特定部で特定する前記回避経路が前記法規外経路であって、且つ、前記車両の走行車線の対向車線若しくは道路端への進入が必要な経路である場合には、前記走行環境特定部でその進入先に他車両及び歩行者が存在しないことを特定していることをもとに、その法規外経路への回避を許可する車両用制御装置。
【請求項7】
周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、
前記車両の走行を妨げる障害を特定する障害特定部(111,111a)と、
前記障害特定部で前記障害を特定した場合に、前記障害を回避可能な前記車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、
前記監視義務なし自動運転中に、前記回避対応策特定部で特定する前記回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)と、
前記車両の走行環境を特定する走行環境特定部(101a)とを備え、
前記回避対応策特定部(131a)は、前記障害特定部で前記障害を特定した場合に、前記回避対応策として、停止線での停止なしでの通過を特定し、
前記第1許可部(134a)は、前記回避対応策特定部で特定する前記回避対応策が、停止線での停止なしでの通過である場合には、前記走行環境特定部でその停止線から所定範囲内に障害物が存在しないことを特定していることをもとに、その停止線での停止なしでの通過を許可する車両用制御装置。
【請求項8】
請求項7に記載の車両用制御装置であって、
前記第1許可部で前記停止線での停止なしでの通過を許可する場合に、その停止線に前記車両が到達するまでに前記車両の速度を規定値以下となるように制御し、前記車両がその停止線を跨いでいる間、前記規定値以下の速度で前記車両を走行させる通過制御部(142)を備える車両用制御装置。
【請求項9】
請求項7に記載の車両用制御装置であって、
前記障害特定部(111a)は、緊急車両の前記車両への接近を、前記車両の走行を妨げる障害として特定し、
前記回避対応策特定部は、前記障害特定部で前記緊急車両の前記車両への接近を特定した場合に、前記回避対応策として、停止線での停止なしでの通過を特定し、
前記第1許可部は、前記回避対応策特定部で特定する前記回避対応策が、停止線での停止なしでの通過である場合に、前記走行環境特定部でその停止線から所定範囲内に障害物が存在しないことを特定していることをもとに、その停止線での停止なしでの通過を許可する車両用制御装置。
【請求項10】
請求項7に記載の車両用制御装置であって、
前記第1許可部で前記停止線での停止なしでの通過を許可する場合に、前記車両の運転者に向けて周辺監視を促す報知を行わせる監視促進部(1213)を備える車両用制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両用制御装置及び車両用制御方法に関するものである。
続きを表示(約 5,500 文字)
【背景技術】
【0002】
特許文献1には、レベル0の手動運転機能以外にレベル1からレベル5までの自動運転機能を備える自動運転用コントロールユニットが開示されている。
【0003】
自動化レベルとしては、例えばSAEが定義しているレベル0~5に区分された自動化レベルが知られている。レベル0は、システムが介入せずに運転者が全ての運転タスクを実施するレベルである。レベル0は、いわゆる手動運転に相当する。レベル1は、システムが操舵と加減速とのいずれかを支援するレベルである。レベル2は、システムが操舵と加減速とのいずれをも支援するレベルである。レベル1~2の自動運転は、安全運転に係る監視義務(以下、単に監視義務)が運転者にある自動運転である。レベル3は、高速道路等の特定の場所ではシステムが全ての運転タスクを実施可能なレベルである。レベル4は、対応不可能な道路,極限環境等の特定状況下を除き、システムが全ての運転タスクを実施可能なレベルである。レベル5は、あらゆる環境下でシステムが全ての運転タスクを実施可能なレベルである。レベル3以上の自動運転は、監視義務が運転者にない自動運転である。レベル4以上の自動運転は、運転者の睡眠が許可される自動運転である。
【先行技術文献】
【特許文献】
【0004】
特開2019-101453号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、監視義務が運転者にない自動運転,運転者の睡眠が許可される自動運転といった高度な自動化レベルでの自動運転を行う技術が開示されているが、交通法規内の行動で障害の回避が困難な場合は想定されていない。よって、特許文献1に開示の技術では、自動運転中に障害を回避する場合であって、且つ、交通法規内の行動では回避が困難な場合に、自動での障害の回避が難しくなるおそれがある。このように、交通法規若しくは交通マナーに囚われすぎた自動運転を継続し続けることが好ましくない状況もあり得る。
【0006】
この開示の1つの目的は、自動運転中に交通法規若しくは交通マナーの範囲内での運転が好ましくない場合に、交通法規若しくは交通マナーの範囲を外れた運転を可能にする車両用制御装置及び車両用制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は、開示の更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、1つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本開示の技術的範囲を限定するものではない。
【0008】
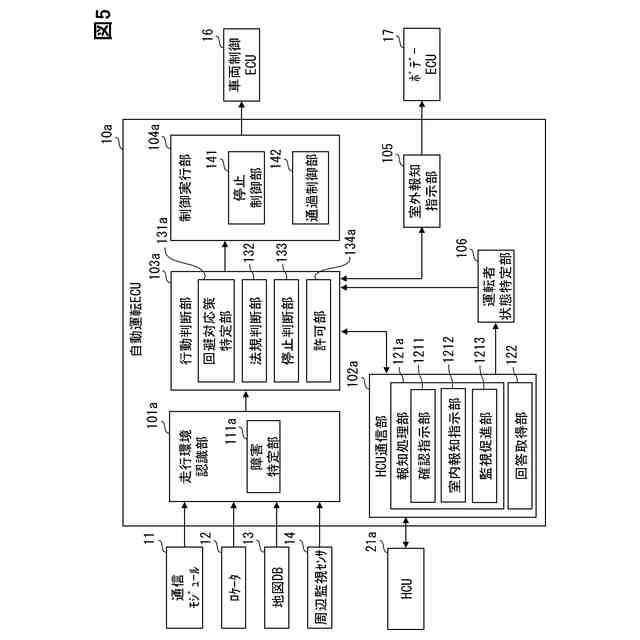
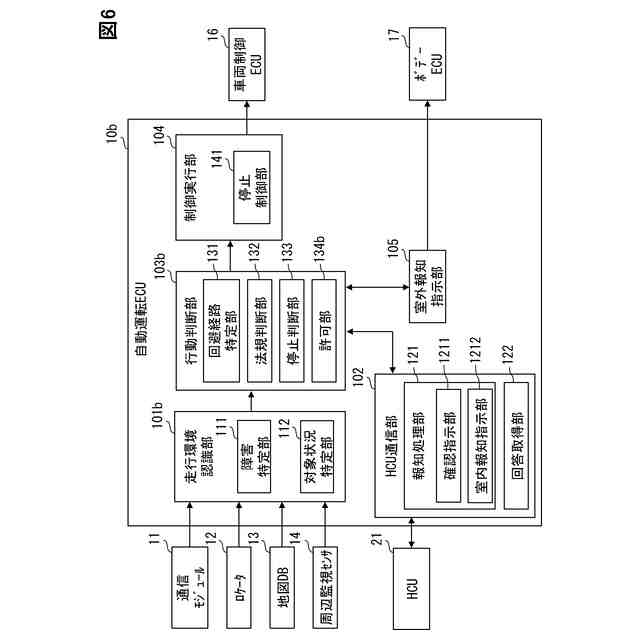
上記目的を達成するために、本開示の第1の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行を妨げる障害を特定する障害特定部(111,111a)と、障害特定部で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、監視義務なし自動運転中に、回避対応策特定部で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)とを備え、回避対応策特定部(131)は、障害特定部で障害を特定した場合に、回避対応策として、障害を回避可能な車両の経路である回避経路を特定するものであり、第1許可部(134)は、監視義務なし自動運転中に、回避対応策特定部で特定する回避経路が、逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、回避対応策特定部で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合に、車両を一旦停止させる停止制御部(141)と、回避対応策特定部で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合に、車両の運転者に向けて法規外経路への回避の諾否を問い合わせさせる確認指示部(1211)と、確認指示部で問い合わせさせた諾否に対する運転者からの回答を取得する回答取得部(122)とを備え、第1許可部は、回避対応策特定部で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合には、回答取得部で法規外経路への回避を承諾する回答を取得した場合に、その法規外経路への回避を許可する。
上記目的を達成するために、本開示の第2の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行を妨げる障害を特定する障害特定部(111,111a)と、障害特定部で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、監視義務なし自動運転中に、回避対応策特定部で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)とを備え、回避対応策特定部(131)は、障害特定部で障害を特定した場合に、回避対応策として、障害を回避可能な車両の経路である回避経路を特定するものであり、第1許可部(134)は、監視義務なし自動運転中に、回避対応策特定部で特定する回避経路が、逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、監視義務なし自動運転のうちの車両の運転者の睡眠が許可される睡眠許可自動運転と運転者の睡眠が許可されない睡眠不許可自動運転とを少なくとも実施する車両で用いることが可能であり、睡眠許可自動運転と睡眠不許可自動運転との自動化レベルの違いで交通法の範囲を外れる領域が異なるものであり、第1許可部は、睡眠許可自動運転中の場合には、回避対応策特定部で特定する回避経路が、睡眠許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する一方、睡眠不許可自動運転中の場合には、回避対応策特定部で特定する回避経路が、睡眠不許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する。
上記目的を達成するために、本開示の第3の車両用制御装置は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御装置であって、車両の走行を妨げる障害を特定する障害特定部(111,111a)と、障害特定部で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定部(131,131a)と、監視義務なし自動運転中に、回避対応策特定部で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可部(134,134a)と、車両の走行環境を特定する走行環境特定部(101a)とを備え、回避対応策特定部(131a)は、障害特定部で障害を特定した場合に、回避対応策として、停止線での停止なしでの通過を特定し、第1許可部(134a)は、回避対応策特定部で特定する回避対応策が、停止線での停止なしでの通過である場合には、走行環境特定部でその停止線から所定範囲内に障害物が存在しないことを特定していることをもとに、その停止線での停止なしでの通過を許可する。
【0009】
上記目的を達成するために、本開示の第1の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行を妨げる障害を特定する障害特定工程と、障害特定工程で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定工程と、監視義務なし自動運転中に、回避対応策特定工程で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可工程とを含み、回避対応策特定工程では、障害特定工程で障害を特定した場合に、回避対応策として、障害を回避可能な車両の経路である回避経路を特定するものであり、第1許可工程では、監視義務なし自動運転中に、回避対応策特定工程で特定する回避経路が、逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、回避対応策特定工程で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合に、車両を一旦停止させる停止制御工程と、回避対応策特定工程で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合に、車両の運転者に向けて法規外経路への回避の諾否を問い合わせさせる確認指示工程と、確認指示工程で問い合わせさせた諾否に対する運転者からの回答を取得する回答取得工程とを備え、第1許可工程では、回避対応策特定工程で特定する回避経路が法規外経路である場合であって、且つ、車両の一旦停止が可能な場合には、回答取得工程で法規外経路への回避を承諾する回答を取得した場合に、その法規外経路への回避を許可する。
上記目的を達成するために、本開示の第2の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行を妨げる障害を特定する障害特定工程と、障害特定工程で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定工程と、監視義務なし自動運転中に、回避対応策特定工程で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可工程とを含み、回避対応策特定工程では、障害特定工程で障害を特定した場合に、回避対応策として、障害を回避可能な車両の経路である回避経路を特定するものであり、第1許可工程では、監視義務なし自動運転中に、回避対応策特定工程で特定する回避経路が、逸脱対応策のうちの交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可するものであり、監視義務なし自動運転のうちの車両の運転者の睡眠が許可される睡眠許可自動運転と運転者の睡眠が許可されない睡眠不許可自動運転とを少なくとも実施する車両で用いることが可能であり、睡眠許可自動運転と睡眠不許可自動運転との自動化レベルの違いで交通法の範囲を外れる領域が異なるものであり、第1許可工程では、睡眠許可自動運転中の場合には、回避対応策特定工程で特定する回避経路が、睡眠許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する一方、睡眠不許可自動運転中の場合には、回避対応策特定工程で特定する回避経路が、睡眠不許可自動運転に応じた交通法規の範囲を外れる法規外経路であることをもとに、その法規外経路への回避を許可する。
上記目的を達成するために、本開示の第3の車両用制御方法は、周辺監視義務のない自動運転である監視義務なし自動運転を実施する車両で用いることが可能な車両用制御方法であって、少なくとも1つのプロセッサにより実行される、車両の走行を妨げる障害を特定する障害特定工程と、障害特定工程で障害を特定した場合に、障害を回避可能な車両の対応策である回避対応策を特定する回避対応策特定工程と、監視義務なし自動運転中に、回避対応策特定工程で特定する回避対応策が交通法規の範囲を外れる逸脱対応策であることをもとに、その逸脱対応策での回避を許可する第1許可工程と、車両の走行環境を特定する走行環境特定工程とを含み、回避対応策特定工程では、障害特定工程で障害を特定した場合に、回避対応策として、停止線での停止なしでの通過を特定し、第1許可工程では、回避対応策特定工程で特定する回避対応策が、停止線での停止なしでの通過である場合には、走行環境特定工程でその停止線から所定範囲内に障害物が存在しないことを特定していることをもとに、その停止線での停止なしでの通過を許可する。
【0010】
以上の構成によれば、監視義務なし自動運転中に、車両の走行を妨げる障害を回避可能な回避対応策が交通法規の範囲を外れる逸脱対応策であっても、その逸脱対応策での回避が可能になる。よって、自動運転中に交通法規若しくは交通マナーの範囲内での運転が好ましくない場合に、交通法規若しくは交通マナーの範囲を外れた運転が可能になる。また、自動運転中に障害の回避が必要な場合であって、且つ、交通法規内の行動では回避が困難な場合であっても、障害の回避を自動でより円滑に行わせることが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
操縦桿
7日前
株式会社デンソー
半導体装置
6日前
株式会社デンソー
情報処理方法
今日
株式会社デンソー
運転支援装置
7日前
株式会社デンソー
アクチュエータ
6日前
株式会社デンソー
冷凍サイクル装置
1日前
株式会社デンソー
エネルギー予測装置
7日前
株式会社デンソー
発光ユニット、光学センサ
6日前
株式会社デンソー
無線装置、及び電源ユニット
今日
株式会社デンソーウェーブ
認証システムおよび認証方法
今日
株式会社デンソー
潅水システムおよび制御装置
1日前
株式会社デンソー
潅水システムおよび制御装置
1日前
株式会社デンソー
作業装置および作業プログラム
7日前
株式会社デンソー
解体装置および解体プログラム
7日前
株式会社デンソーテン
制御装置、制御方法、およびプログラム
7日前
トヨタ自動車株式会社
自動駐車システム
今日
株式会社デンソー
制御装置、光学センサ、制御方法、制御プログラム
今日
トヨタ自動車株式会社
熱管理システムおよび切替装置
7日前
株式会社デンソーウェーブ
リング状部材の装着システム、リング状部材の装着方法
今日
株式会社デンソー
電子制御装置、制御システム、制御方法及びコンピュータプログラム
1日前
株式会社デンソー
シナリオ抽出方法、シナリオ抽出装置およびシナリオ抽出プログラム
1日前
株式会社デンソー
炭化珪素単結晶製造装置、その演算機および炭化珪素単結晶の製造方法
2日前
株式会社デンソー
半導体装置およびインバータ
8日前
株式会社デンソー
データ収集システム、自動化作業システム、データ収集プログラム及び自動化作業プログラム生成プログラム
7日前
個人
飛行自動車
1か月前
個人
眼科手術車
2か月前
個人
授乳用車両
2か月前
日本精機株式会社
表示装置
21日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
22日前
日本精機株式会社
表示装置
2日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
照明装置
21日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2日前
日本精機株式会社
表示装置
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ