TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034797
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141419
出願日
2023-08-31
発明の名称
積込機械の制御システム、積込機械の制御方法および積込機械の遠隔操作システム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
3/43 20060101AFI20250306BHJP(水工;基礎;土砂の移送)
要約
【課題】自動制御においてオペレータが混乱することを防ぐ。
【解決手段】姿勢特定部は作業具の位置を特定する。排土点決定部は、積込対象の位置に基づいて、荷を積込対象に積み込むための排土点を決定する。自動制御判定部は、作業具の位置と排土点の位置とに基づいて、作業具を排土点まで移動させる自動制御を開始するか否かを判定する。
【選択図】図7
特許請求の範囲
【請求項1】
旋回中心回りに旋回する旋回体と、前記旋回体を支持する支持部と、前記旋回体に取り付けられた作業具を含む作業機とを備える積込機械を制御する積込機械の制御システムであって、
前記作業具の位置を特定する姿勢特定部と、
積込対象の位置に基づいて、荷を前記積込対象に積み込むための排土点を決定する排土点決定部と、
前記作業具の位置と前記排土点の位置とに基づいて、前記作業具を前記排土点まで移動させる自動制御を開始するか否かを判定する自動制御判定部と、
を備える積込機械の制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記自動制御判定部は、前記作業具が向く方位によって前記自動制御を開始するか否かを判定する
請求項1に記載の積込機械の制御システム。
【請求項3】
前記自動制御判定部は、前記旋回体の旋回中心から前記排土点が向く方位と、前記旋回体の旋回中心から前記作業具が向く方位との相対角度によって前記自動制御を開始するか否かを判定する
請求項2に記載の積込機械の制御システム。
【請求項4】
前記自動制御判定部は、前記旋回体の旋回中心から前記排土点を向く方位と、前記旋回体の旋回中心から前記作業具が向く方位との相対角度が第1閾値より小さい場合に前記自動制御を開始しない
請求項3に記載の積込機械の制御システム。
【請求項5】
前記自動制御判定部は、前記旋回体の旋回中心から前記排土点を向く方位と、前記旋回体の旋回中心から前記作業具が向く方位との相対角度が第2閾値より大きい場合に前記自動制御を開始しない
請求項3に記載の積込機械の制御システム。
【請求項6】
前記作業具を前記排土点へ移動させるための前記旋回体が旋回する方向を決定する旋回方向決定部を備える
請求項1に記載の積込機械の制御システム。
【請求項7】
前記旋回方向決定部は、上方からの平面視で被積込機械の運転室と作業具が重ならない方向に前記旋回する方向を決定する
請求項6に記載の積込機械の制御システム。
【請求項8】
前記旋回方向決定部は、前記作業具が向く方位と前記排土点が向く方位とがなす角度が最小となる方向に前記旋回する方向を決定する
請求項6に記載の積込機械の制御システム。
【請求項9】
旋回体と、前記旋回体に取り付けられ作業具を含む作業機とを備える積込機械を制御する積込機械の制御方法であって、
前記作業具の位置を特定するステップと、
積込対象の位置に基づいて、荷を前記積込対象に積み込むための排土点を特定するステップと、
前記作業具の位置と前記排土点の位置とに基づいて、前記作業具を前記排土点まで移動させる自動制御を開始するか否かを判定するステップと、
を備える積込機械の制御方法。
【請求項10】
請求項1から請求項8のいずれか一項に記載の積込機械の制御システムと、
前記積込機械の制御システムから遠隔に設けられた表示装置および操作装置と、
を備える、
積込機械の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、積込機械の制御システム、積込機械の制御方法および積込機械の遠隔操作システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、積込機械の自動制御において、積込対象である運搬車両との接触が生じないように、作業具を干渉回避点まで移動させた後、旋回体の旋回のみによって作業具を排土点まで移動させる技術が開示されている。特許文献1における干渉回避点は、排土点と同じ高さを有し、かつ旋回体の旋回中心からの距離が、旋回中心から排土点までの距離と等しく、かつ下方に積込対象が存在しない位置である。
【先行技術文献】
【特許文献】
【0003】
特開2022-079773号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、運搬車両が停まる位置や掘削のために積込機械が向く方位は、毎回同じではなく変化していく。そのため、運搬車両と積込機械との位置関係によって荷を運搬車両の上まで移動させる自動制御の挙動が変化し得る。このとき、自動制御による積込機械の挙動がオペレータの想定と異なる場合に、オペレータが混乱してしまう可能性がある。
本開示の目的は、自動制御においてオペレータが混乱することを防ぐことができる積込機械の制御システム、積込機械の制御方法および積込機械の遠隔操作システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、積込機械の制御システムは、旋回中心回りに旋回する旋回体と、前記旋回体を支持する支持部と、前記旋回体に取り付けられ作業具を含む作業機とを備える積込機械を制御する積込機械の制御システムであって、前記作業具の位置を特定する姿勢特定部と、積込対象の位置に基づいて、荷を前記積込対象に積み込むための排土点を決定する排土点決定部と、前記作業具の位置と前記排土点の位置とに基づいて、前記作業具を前記排土点まで移動させる自動制御を開始するか否かを判定する自動制御判定部と、を備える。
【発明の効果】
【0006】
上記態様によれば、積込機械の制御システムは自動制御においてオペレータが混乱することを防ぐことができる。
【図面の簡単な説明】
【0007】
第一実施形態に係る遠隔操作システムの構成を示す概略図である。
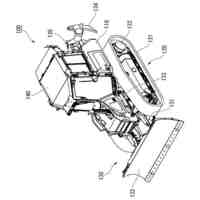
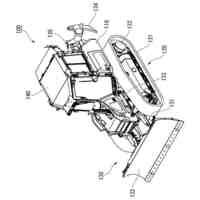
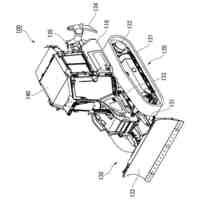
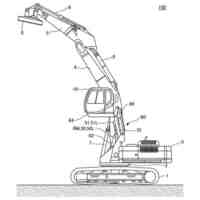
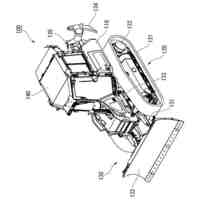
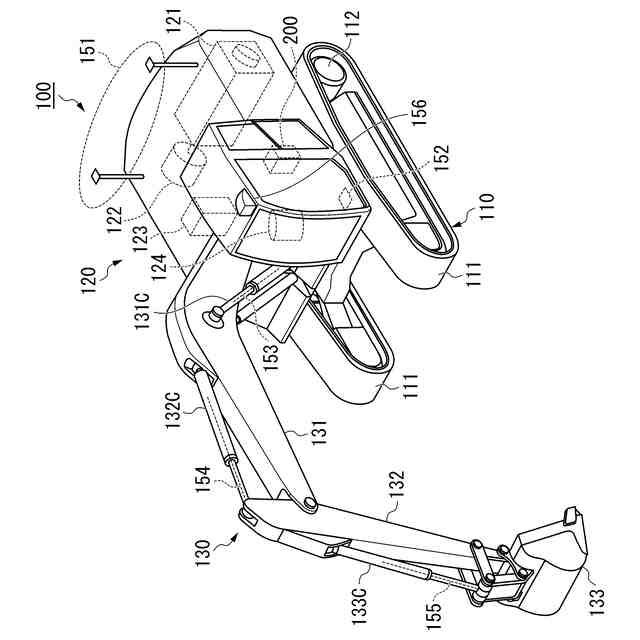
第一実施形態に係る積込機械の構成を示す概略図である。
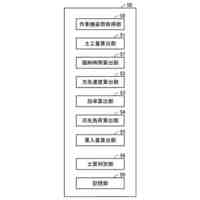
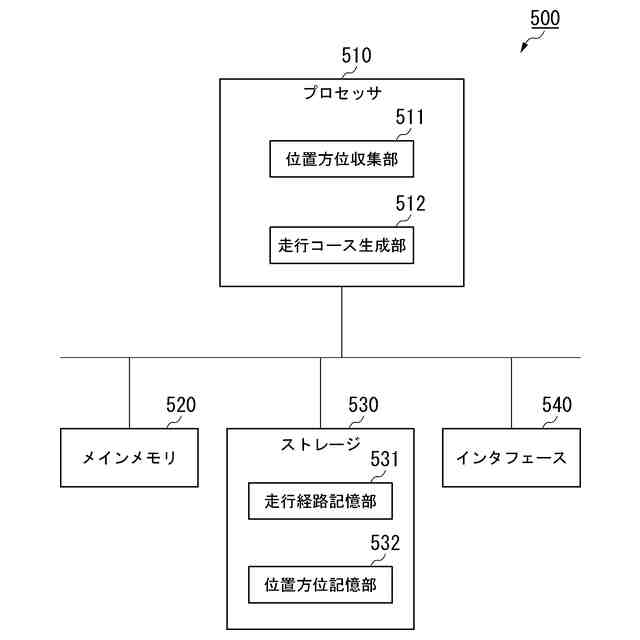
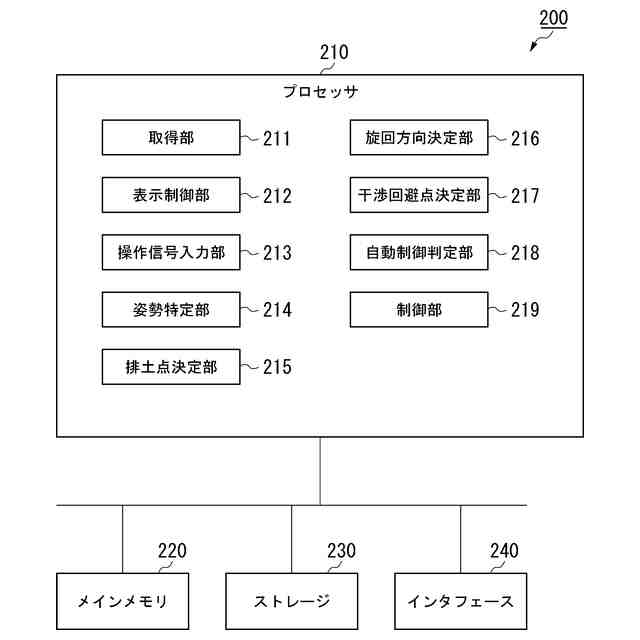
第一実施形態に係る管制装置の構成を示す概略ブロック図である。
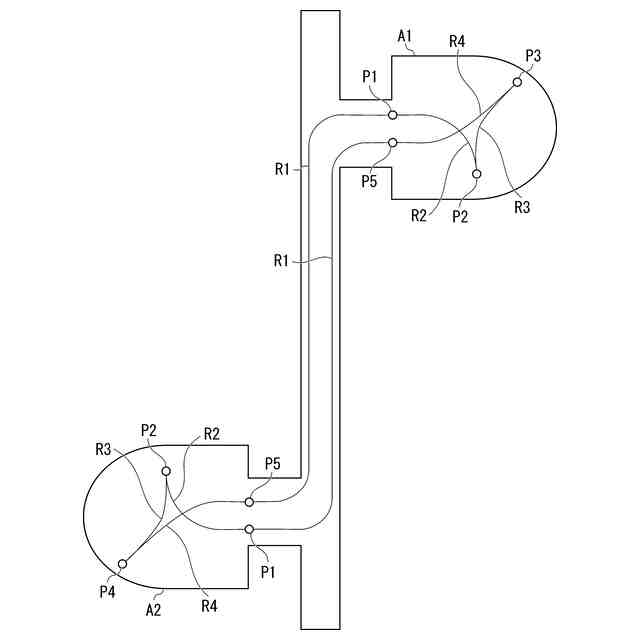
第一実施形態に係る走行経路の例を表す図である。
第一実施形態に係る積込機械の制御装置の構成を示す概略ブロック図である。
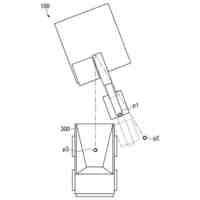
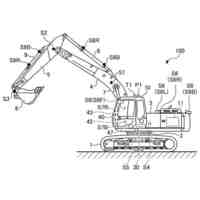
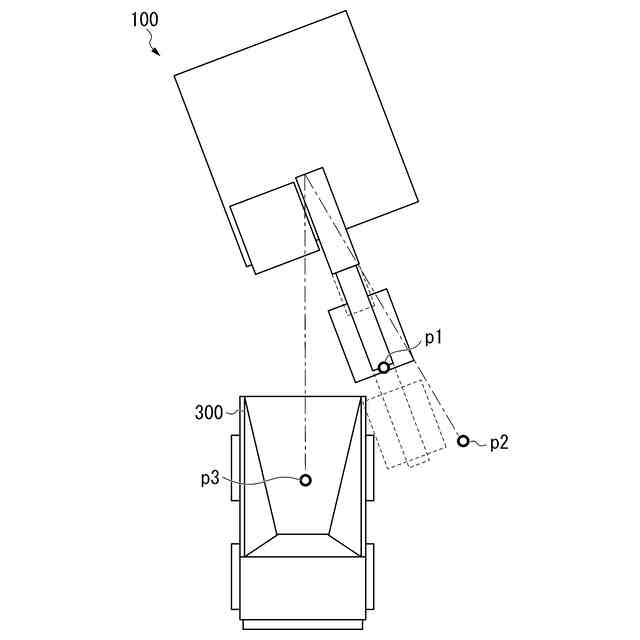
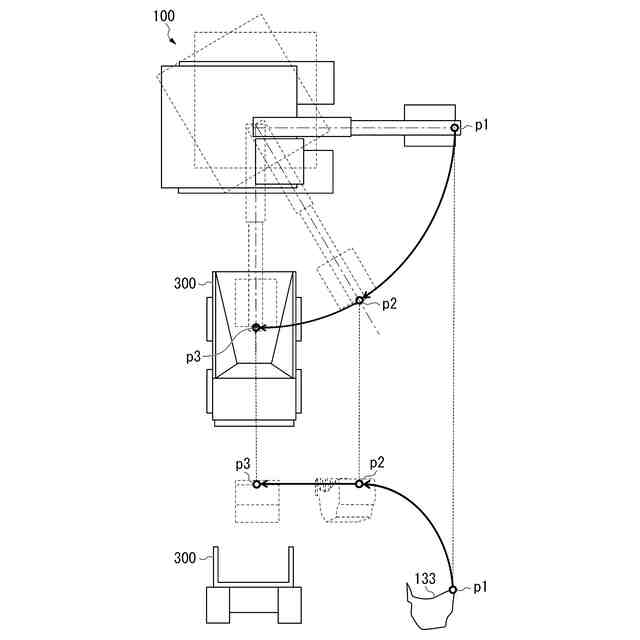
第一実施形態に係る自動制御における積込機械の動きの例を示す図である。
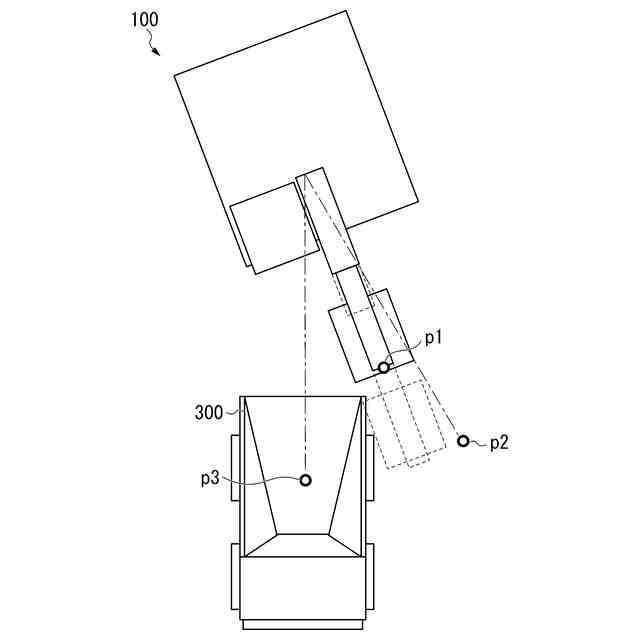
第一の実施形態において自動制御を開始しない第一の例を示す図である。
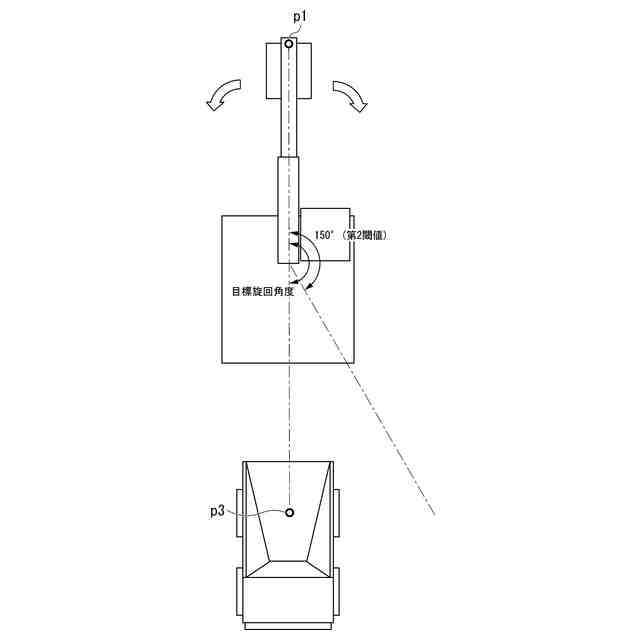
第一の実施形態において自動制御を開始しない第二の例を示す図である。
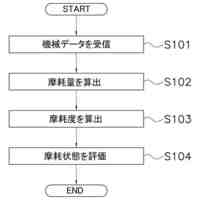
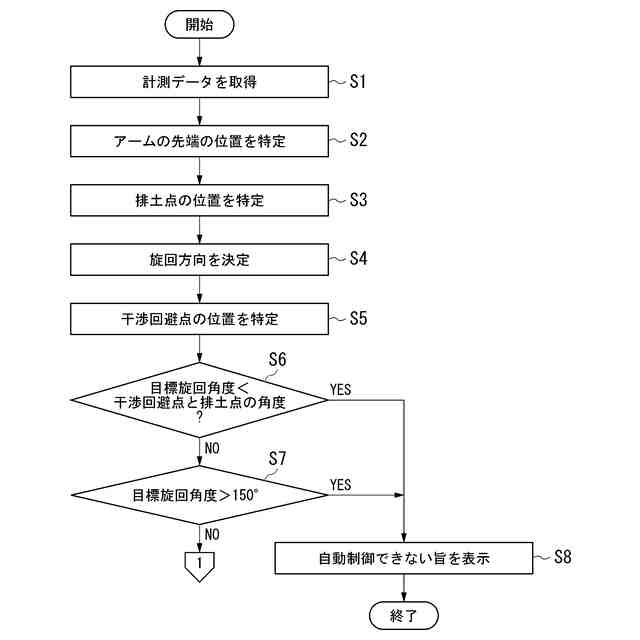
第一実施形態に係る作業システムの自動制御方法を示すフローチャート(パート1)である。
第一実施形態に係る作業システムの自動制御方法を示すフローチャート(パート2)である。
【発明を実施するための形態】
【0008】
〈第一実施形態〉
《作業システム》
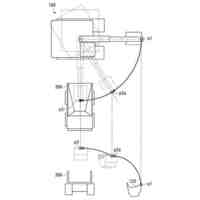
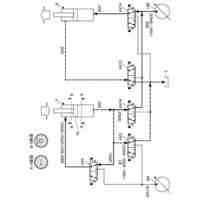
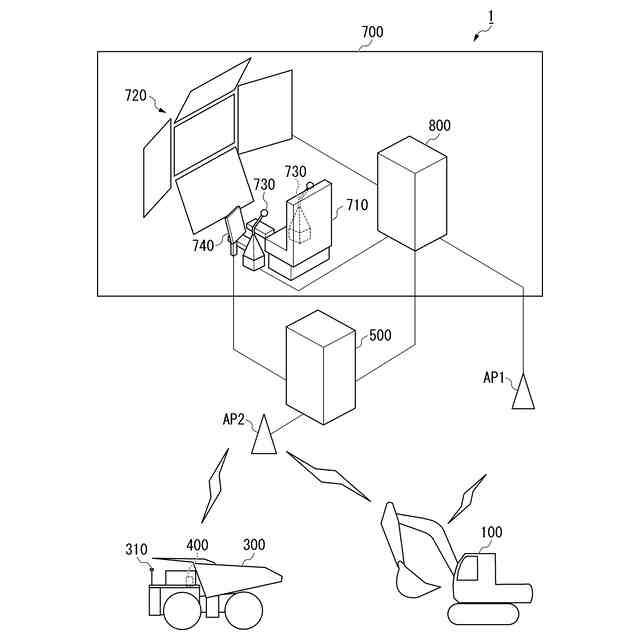
図1は、第一実施形態に係る遠隔操作システムの構成を示す概略図である。
作業システム1は、積込機械100と、積込対象である1または複数の運搬車両300と、管制装置500と、遠隔運転室700とを備える。積込機械100および運搬車両300は、作業現場(例えば、鉱山、採石場)で稼働する。遠隔運転室700は、作業現場から離れた地点(例えば、市街、作業現場内)に設けられる。
【0009】
積込機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、荷として運搬車両300の荷台に積み込む。積込機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また積込機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る積込機械100は、バックホウショベルである。
積込機械100は、遠隔運転室700から送信される操作信号に基づいて遠隔操作される。積込機械100と遠隔運転室700とは、アクセスポイントAP1を介した通信により接続される。遠隔運転室700の操作装置730は、オペレータの操作により、積込機械100の操作を受け付け、遠隔制御装置800は、操作信号を管制装置500に送信する。積込機械100は、遠隔運転室700から受信した操作信号に基づいて動作する。つまり、作業システム1は、積込機械100と遠隔運転室700とから構成される遠隔運転システムを備える。アクセスポイントAP1は、遠隔運転システムの通信に用いられる。
【0010】
運搬車両300は、管制装置500から受信する制御情報に基づいて無人走行する。運搬車両300と管制装置500とはアクセスポイントAP2を介した通信により接続される。管制装置500は、運搬車両300から運搬車両300の位置及び方位を取得し、これらに基づいて運搬車両300の走行に用いるコース情報を生成する。管制装置500は、コース情報を運搬車両300に送信する。運搬車両300は、受信したコース情報に基づいて無人走行する。つまり、作業システム1は、運搬車両300と管制装置500とを含む無人搬送システムを備える。アクセスポイントAP2は、無人搬送システムの通信に用いられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
作業機械
28日前
株式会社小松製作所
伸縮機構
7日前
株式会社小松製作所
トランスミッション
1日前
株式会社小松製作所
判定システムおよび判定方法
1日前
株式会社小松製作所
カメラシステム及び作業車両
7日前
株式会社小松製作所
寿命予測システム及び寿命予測方法
7日前
株式会社小松製作所
モータ装置及びモータ装置の製造方法
21日前
株式会社小松製作所
土質判別システムおよび土質判別方法
1日前
株式会社小松製作所
識別システム、較正方法及び作業車両
1日前
株式会社小松製作所
作業機械の管理システム及び作業機械の管理方法
7日前
株式会社小松製作所
作業車両の計測システムおよび作業車両の計測方法
1日前
株式会社小松製作所
作業車両の計測システムおよび作業車両の計測方法
1日前
株式会社小松製作所
トランスミッションを制御するための方法およびシステム
1日前
株式会社小松製作所
すべり軸受の摩耗状態を評価するためのシステムおよび方法
7日前
株式会社小松製作所
作業機械の表示システム、作業機械、及び作業機械の表示方法
7日前
株式会社小松製作所
作業機械の物体検知センサ校正システム及び物体検知センサ校正方法
7日前
株式会社小松製作所
積込機械の制御システム、積込機械の制御方法および積込機械の遠隔操作システム
1日前
株式会社小松製作所
積込機械の制御システム、積込機械の制御方法および積込機械の遠隔操作システム
1日前
株式会社小松製作所
作業車両の移動量推定モデルの生成方法および作業車両の移動量推定モデルの生成装置
1日前
個人
砂堆積ネット
今日
株式会社高橋監理
不同沈下修正機
21日前
株式会社エスイー
防災構造物
2日前
個人
一種の新型水力発電装置
今日
個人
潜水式土運船と土砂降ろし方法
21日前
ヨシモトポール株式会社
鋼管杭
1日前
住友建機株式会社
作業機械
1日前
株式会社大林組
建築物の基礎構造及び方法
7日前
カナデビア株式会社
サクション基礎
21日前
大和ハウス工業株式会社
建物
1日前
株式会社遠藤工業
地中障害物撤去方法
1日前
住友重機械工業株式会社
作業機械
1日前
住友重機械工業株式会社
ショベル
1日前
住友重機械工業株式会社
ショベル
1日前
株式会社オーイケ
擁壁および基礎ブロック
21日前
埼玉八栄工業株式会社
地盤撹拌装置
14日前
株式会社竹内製作所
作業用車両
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ