TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034442
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023140830
出願日
2023-08-31
発明の名称
モータ制御装置および制御方法
出願人
日立Astemo株式会社
代理人
弁理士法人開知
主分類
H02P
21/14 20160101AFI20250306BHJP(電力の発電,変換,配電)
要約
【課題】磁石温度または磁石磁束推定の際に、過渡成分を正確に算出することにより、d軸電流またはq軸電流が変動している過渡状態においても、推定精度を高めることができるモータ制御装置および制御方法を提供すること。
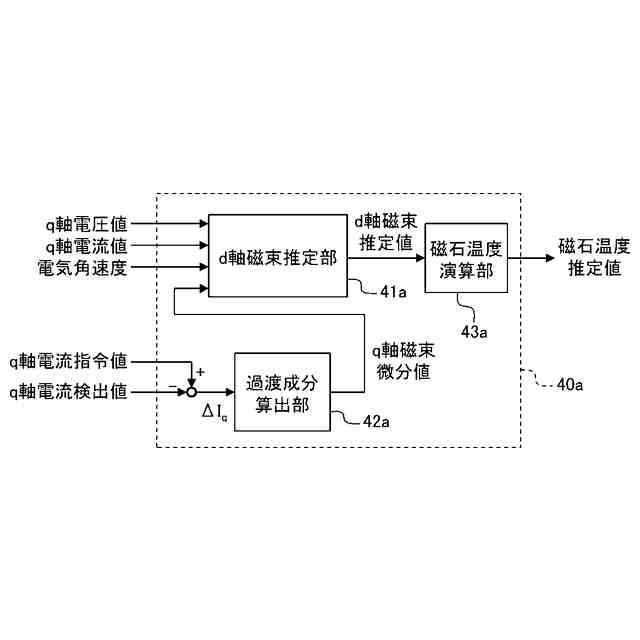
【解決手段】モータをインバータにより駆動するモータ制御装置であって、q軸磁束指令値とq軸磁束検出値との差分、または、q軸電流指令値とq軸電流検出値との差分に基づいて、q軸磁束微分値を算出する過渡成分算出部と、q軸電圧値とq軸電流と電気角速度とq軸磁束微分値とに基づいて、d軸磁束推定値を算出するd軸磁束推定部と、d軸磁束推定値に基づいて、磁石温度推定値を算出する磁石温度演算部と、を備える。
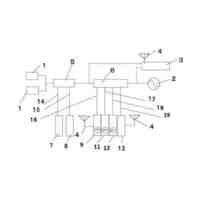
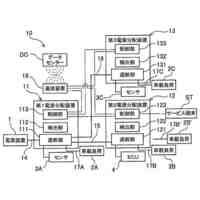
【選択図】 図1
特許請求の範囲
【請求項1】
モータをインバータにより駆動するモータ制御装置であって、
q軸磁束指令値とq軸磁束検出値との差分、または、q軸電流指令値とq軸電流検出値との差分に基づいて、q軸磁束微分値を算出する過渡成分算出部と、
q軸電圧値とq軸電流と電気角速度と前記q軸磁束微分値とに基づいて、d軸磁束推定値を算出するd軸磁束推定部と、
前記d軸磁束推定値に基づいて、磁石温度推定値を算出する磁石温度演算部と、
を備えることを特徴とするモータ制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1記載のモータ制御装置において、
前記過渡成分算出部は、前記q軸磁束指令値と前記q軸磁束検出値との差分に前記q軸磁束指令値に対する前記q軸磁束検出値の応答時定数の逆数を乗じた値、または、前記q軸電流指令値と前記q軸電流検出値との差分に前記q軸電流指令値に対する前記q軸電流検出値の応答時定数の逆数を乗じた値に基づいて、前記q軸磁束微分値を算出することを特徴とするモータ制御装置。
【請求項3】
請求項1または2に記載のモータ制御装置において、
d軸電流指令値と前記q軸電流指令値とに基づいて、前記q軸磁束指令値を算出するq軸磁束指令値演算部と、
d軸電流検出値と前記q軸電流検出値とに基づいて、前記q軸磁束検出値を算出するq軸磁束検出値演算部と、
を備えることを特徴とするモータ制御装置。
【請求項4】
モータをインバータにより駆動するモータ制御装置であって、
d軸電流検出値、q軸電流検出値、q軸電流指令値、または、q軸磁束検出値に基づいて、前記モータの磁気飽和を考慮してq軸磁束微分値を算出する過渡成分算出部と、
q軸電圧値とq軸電流と電気角速度と前記q軸磁束微分値とに基づいて、d軸磁束推定値を算出するd軸磁束推定部と、
前記d軸磁束推定値に基づいて、磁石温度推定値を算出する磁石温度演算部と、
を備えることを特徴とするモータ制御装置。
【請求項5】
請求項4記載のモータ制御装置において、
前記過渡成分算出部は、
前記q軸電流指令値と前記q軸電流検出値の差分からq軸電流微分値を算出する算出手段、または、q軸電流検出値を微分してq軸電流微分値を算出するq軸電流微分器と、
前記d軸電流検出値と前記q軸電流検出値とに基づいて、q軸インダクタンスを算出するq軸インダクタンス算出部とを備え、
前記q軸電流微分値と前記q軸インダクタンスとの積により前記q軸磁束微分値を算出するか、又は、前記q軸磁束検出値を微分するq軸磁束微分器により前記q軸磁束微分値を算出することを特徴とするモータ制御装置。
【請求項6】
請求項4または5に記載のモータ制御装置において、
前記d軸電流検出値と前記q軸電流検出値とに基づいて、前記q軸磁束検出値を算出するq軸磁束検出値演算部を備えることを特徴とするモータ制御装置。
【請求項7】
インバータにより駆動されるモータの制御方法であって、
q軸磁束指令値とq軸磁束検出値との差分、または、q軸電流指令値とq軸電流検出値との差分に基づいて、q軸磁束微分値を算出する過渡成分算出部と、
q軸電圧値とq軸電流と電気角速度と前記q軸磁束微分値とに基づいて、d軸磁束推定値を算出する手順と、
前記d軸磁束推定値に基づいて、磁石温度推定値を算出する手順と、
を有することを特徴とする制御方法。
【請求項8】
インバータにより駆動されるモータの制御方法であって、
d軸電流検出値、q軸電流検出値、q軸電流指令値、または、q軸磁束検出値に基づいて、前記モータの磁気飽和を考慮してq軸磁束微分値を算出する手順と、
q軸電圧値とq軸電流と電気角速度と前記q軸磁束微分値とに基づいて、d軸磁束推定値を算出する手順と、
前記d軸磁束推定値に基づいて、磁石温度推定値を算出する手順と、
を有することを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置および制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
モータの制御に係る従来技術としては、例えば、特許文献1及び特許文献2に記載のものが知られている。特許文献1には、電圧指令値、および永久磁石同期電動機の回転速度情報に基づき、永久磁石同期電動機が有する磁石の磁束量または磁石の温度を推定する永久磁石同期電動機の駆動装置が開示されている。また、特許文献2には、回転子位置と、推定した総電機子鎖交磁束の発生方向であるγ軸とに基づいて、電機子電流をγ軸とその直交方向であるδ軸からなるγ-δ軸上の電流へ座標変換し、同期機に対する制御指令とγ-δ軸上の電流とに基づいて、永久磁石の温度または磁束を推定する推定方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6978602号公報
特開2013―198340号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の従来技術においては、磁石磁束推定演算部により、q軸電圧から、抵抗値とq軸電流の積、q軸インダクタンスとq軸電流微分値の積、電気角速度とd軸インダクタンスとd軸電流の積を減算し、電気角速度で割ることにより、磁石磁束を推定している。一方、d軸電流またはq軸電流が変動している過渡状態においても磁石磁束を高精度に推定するためには、上記推定演算において過渡時に変動する成分(過渡成分)であるq軸インダクタンスとq軸電流微分値の積を正確に算出する必要がある。電流検出値に存在するノイズの影響に起因して、微分値には大きなノイズが現れるため、過渡成分の正確な算出は困難である。しかしながら、特許文献1においては、過渡成分の算出については何ら開示されておらず、過渡状態における磁石磁束推定値に誤差の発生が予想されるため、改善の余地があると考えられる。
【0005】
特許文献2に記載の従来技術においては、磁石磁束と、d軸インダクタンスとd軸電流の積の和であるd軸磁束を、q軸電圧から、抵抗値とq軸電流の積、q軸インダクタンスとq軸電流微分値の積を減算し、電気角速度で割ることにより推定している。また、演算したd軸磁束に基づき総電機子鎖交磁束の発生方向であるγ軸を推定し、電機子電流をγ軸とその直交方向であるδ軸からなるγ-δ軸上の電流へ座標変換し、同期機に対する制御指令とγ-δ軸上の電流とに基づいて、磁石温度または磁石磁束をしている。しかしながら、特許文献2においても、過渡成分であるq軸インダクタンスとq軸電流微分値の算出については何ら開示されていない。すなわち、特許文献2においては、過渡状態ではd軸磁束の推定値に誤差が発生し、磁石温度または磁石磁束の推定値にも誤差が発生することが予想されるため、改善の余地があると考えられる。
【0006】
本発明は上記に鑑みてなされたものであり、磁石温度または磁石磁束推定の際に、過渡成分を正確に算出することにより、d軸電流またはq軸電流が変動している過渡状態においても、推定精度を高めることができるモータ制御装置および制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
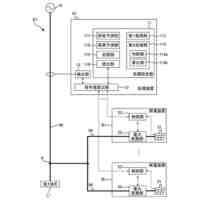
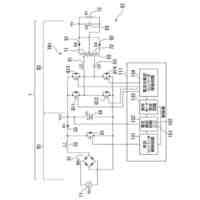
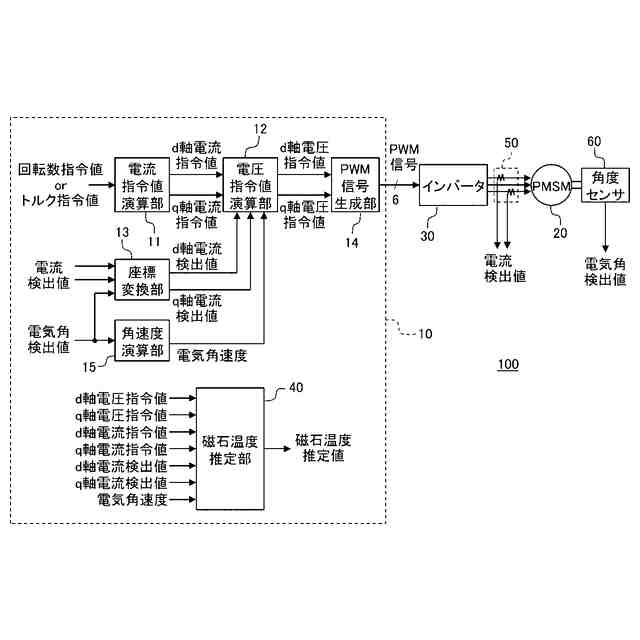
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、モータをインバータにより駆動するモータ制御装置であって、q軸磁束指令値とq軸磁束検出値との差分、または、q軸電流指令値とq軸電流検出値との差分に基づいて、q軸磁束微分値を算出する過渡成分算出部と、q軸電圧値とq軸電流と電気角速度と前記q軸磁束微分値とに基づいて、d軸磁束推定値を算出するd軸磁束推定部と、前記d軸磁束推定値に基づいて、磁石温度推定値を算出する磁石温度演算部と、を備えるものとする。
【発明の効果】
【0008】
本発明によれば、磁石温度または磁石磁束推定の際に、過渡成分を正確に算出することにより、d軸電流またはq軸電流が変動している過渡状態においても、推定精度を高めることができる。
【図面の簡単な説明】
【0009】
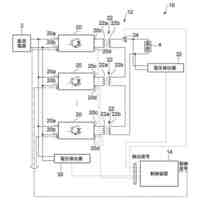
モータ制御装置の構成を概略的に示す図である。
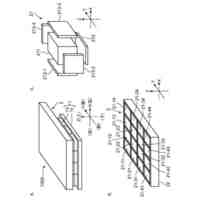
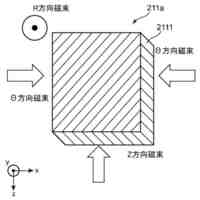
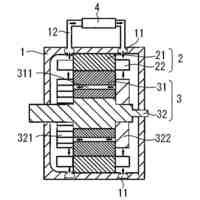
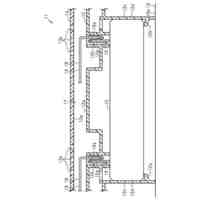
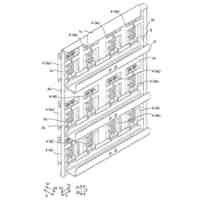
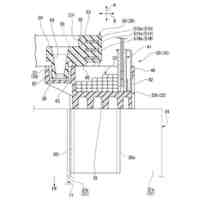
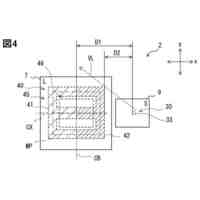
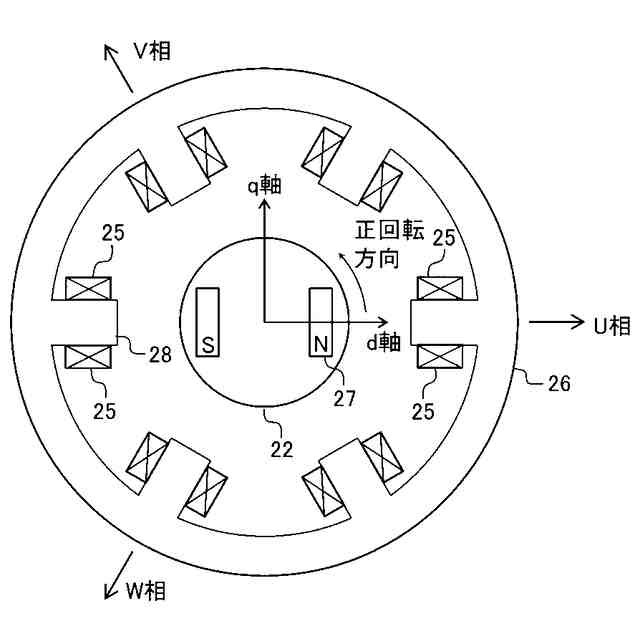
PMモータの構造を模式的に示す図である。
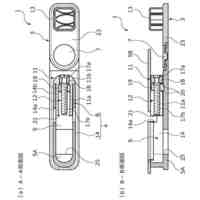
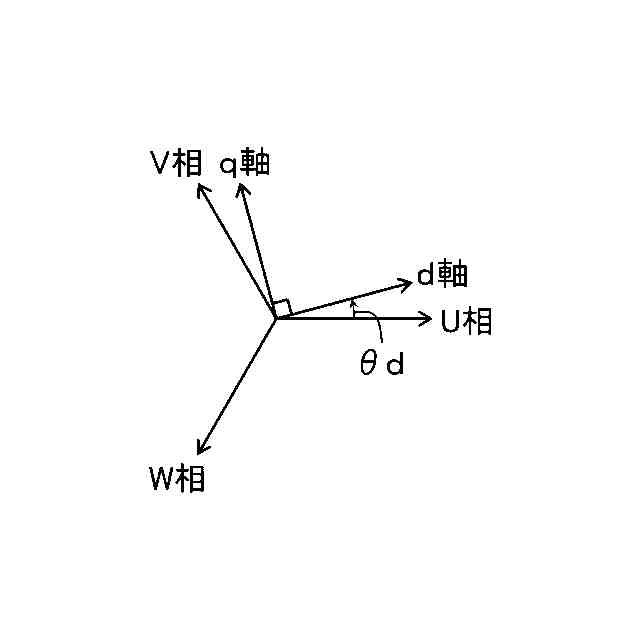
回転子位置と固定子の各巻線の相との関係を示す図である。
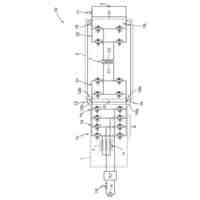
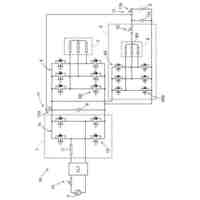
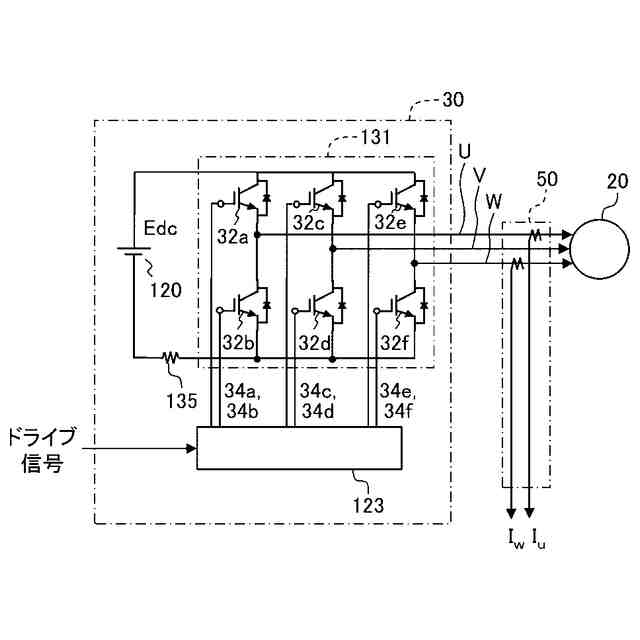
インバータおよび電流検出部の構成を示す図である。
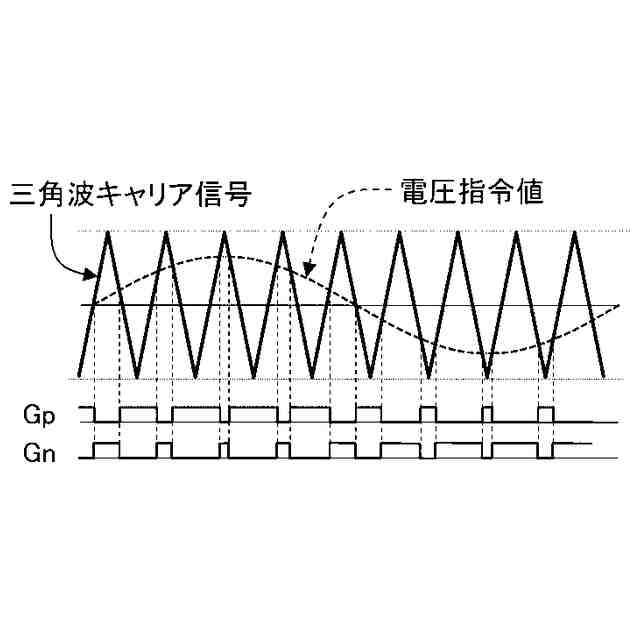
PWMキャリア信号と電圧指令値との関係を示す図である。
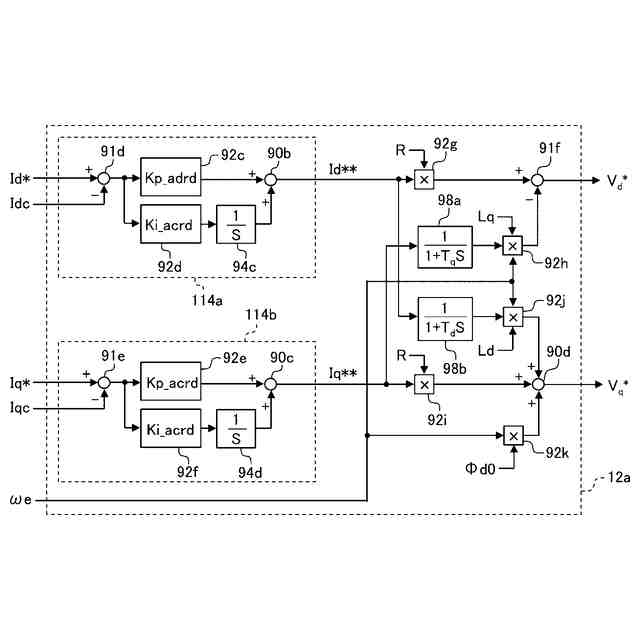
電圧指令値演算部の構成例を示す図である。
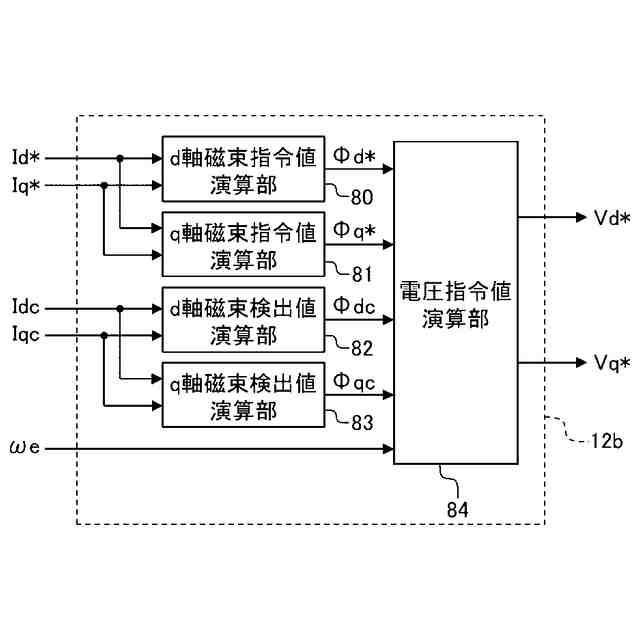
電圧指令値演算部の他の構成例を示す図である。
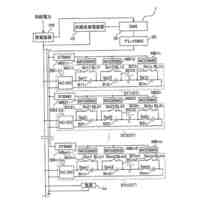
磁石温度推定部の処理内容を示す機能ブロック図である。
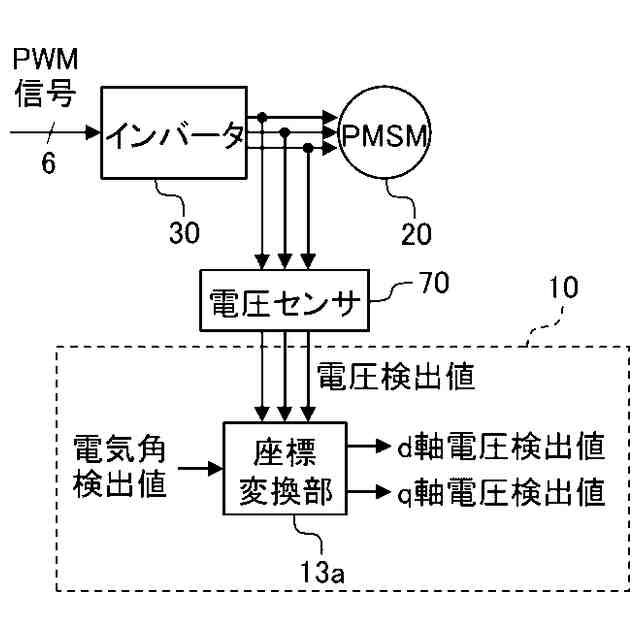
電圧検出部の処理内容の一例を示す機能ブロック図である。
過渡成分算出部の構成例を示す図である。
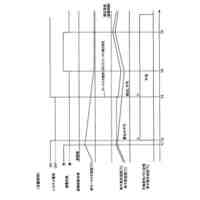
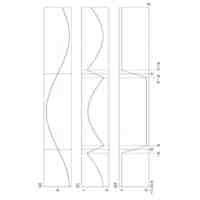
過渡成分を無視した場合における磁石温度推定値の波形例を示す図である。
q軸電流検出値から差分法に基づいて過渡成分であるq軸磁束微分値を算出した場合における磁石温度推定値の波形例を示す図である。
第1の実施の形態に係る磁石温度推定値の波形例を示す図である。
第2の実施の形態に係る磁石温度推定部の処理内容を示す機能ブロック図である。
過渡成分算出部の構成例を示す機能ブロック図である。
q軸電流値に対するq軸磁束値とq軸インダクタンスの特性例を示す図である。
第3の実施の形態に係る磁石温度推定部の処理内容を示す機能ブロック図である。
過渡成分算出部の処理内容を示す機能ブロック図である。
過渡成分算出部の他の構成例を示す機能ブロック図である。
磁石温度推定部の他の構成例を示す機能ブロック図である。
磁石温度推定部の他の構成例における過渡成分算出部の処理内容を示す機能ブロック図である。
過渡成分を無視した場合における磁石温度推定値の波形例を示す図である。
過渡成分の算出において磁気飽和の影響を考慮しない場合における磁石温度推定値の波形例を示す図である。
第3の実施の形態に係る磁石温度推定値の波形例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について図面を参照しつつ詳細に説明する。なお、以下に示す本発明の実施の形態において、各種の構成要素は、必ずしも個々に独立した存在である必要はなく、複数の構成要素が一個の部材として形成されている場合、一つの構成要素が複数の部材で形成されている場合、ある構成要素が他の構成要素の一部である場合、或いは、ある構成要素の一部と他の構成要素の一部とが重複している場合などを許容するものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
モータ
21日前
個人
総反回転復動発電器
10日前
個人
多目的CMモーター
1日前
個人
回転装置のハルバッハ磁石配列
8日前
キヤノン株式会社
無線送電装置
1日前
神保電器株式会社
配線器具取付枠
21日前
株式会社神戸製鋼所
電動機
7日前
株式会社神戸製鋼所
電動機
22日前
日産自動車株式会社
回転電機
1日前
個人
太陽光発電電力活用プラットフォーム
21日前
個人
路面走行車両を利用した発電システム
22日前
住友電装株式会社
電気接続箱
21日前
株式会社ダイヘン
電力システム
21日前
株式会社ダイヘン
電力システム
7日前
矢崎総業株式会社
電源分配装置
1日前
富士電機株式会社
電力変換装置
21日前
ダイハツ工業株式会社
車両用制御装置
2日前
矢崎総業株式会社
蓄電システム
22日前
矢崎総業株式会社
クランプ
2日前
株式会社シマノ
釣竿
1日前
矢崎総業株式会社
クランプ
2日前
株式会社豊田自動織機
電動圧縮機
7日前
株式会社ミツバ
電動モータ
14日前
矢崎総業株式会社
ブラケット
今日
株式会社ダイヘン
無効電力補償装置
7日前
ダイヤゼブラ電機株式会社
インバータ回路
1日前
システムカワバタ有限会社
コード収納装置
15日前
TDK株式会社
電力変換装置
7日前
株式会社アイシン
車載充電装置
1日前
株式会社デンソー
電力変換装置
今日
株式会社TMEIC
電力変換装置
1日前
大阪瓦斯株式会社
電力調達装置
21日前
株式会社アイシン
車載充電装置
2日前
株式会社デンソー
電力制御装置
8日前
株式会社デンソー
電力変換装置
21日前
株式会社アイシン
車両用駆動装置
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ