TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025033439
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023139159
出願日
2023-08-29
発明の名称
回転数算出方法
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01D
5/20 20060101AFI20250306BHJP(測定;試験)
要約
【課題】モータの回転数を算出する手段に冗長性を持たせつつ、モータ制御装置のコスト上昇を抑制できる回転数算出方法を提供すること。
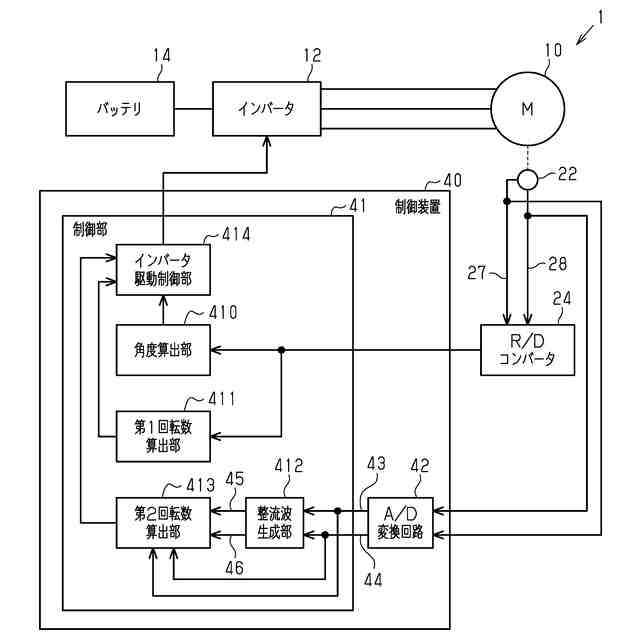
【解決手段】モータ制御装置1において、制御部41が実行するモータ10の回転数算出方法であって、回転数算出方法は、Sin信号43が閾値を跨いだ第1事象を検出することと、Cos信号44が閾値を跨いだ第2事象を検出することと、Sin信号43を整流したSin整流波信号45と、Cos信号44を整流したCos整流波信号46との大小関係が入れ替わった第3事象を検出することと、第1事象と、第2事象と、第3事象とが、所定時間内に検出された回数に基づいて、モータ10の回転数を算出することと、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
直流電力を出力するバッテリと、前記バッテリから出力される直流電力の供給を受けるインバータと、前記インバータから出力される交流電力が供給されるモータと、前記モータの回転子の回転角度に関するアナログ信号を出力するレゾルバと、前記アナログ信号をデジタル信号に変換するA/D変換回路と、前記A/D変換回路が変換したデジタル信号であって、前記回転子の回転角度に関する正弦波信号、及び余弦波信号に基づいて、前記インバータの動作を制御する制御部と、を備えるモータ制御装置において、前記制御部が実行する前記モータの回転数算出方法であって、
前記正弦波信号が閾値を跨いだ第1事象を検出することと、
前記余弦波信号が閾値を跨いだ第2事象を検出することと、
前記正弦波信号を整流した正弦整流波信号と、前記余弦波信号を整流した余弦整流波信号との大小関係が入れ替わった第3事象を検出することと、
前記第1事象と、前記第2事象と、前記第3事象とが、所定時間内に検出された回数に基づいて、前記モータの回転数を算出することと、
を含む回転数算出方法。
続きを表示(約 500 文字)
【請求項2】
前記閾値は、第1閾値と、第2閾値と、第3閾値とを含み、
前記第1閾値は、前記A/D変換回路の分解能の中央値であり、
前記第2閾値は、前記正弦波信号の最大値、又は前記余弦波信号の最大値と前記第1閾値との間の値であり、
前記第3閾値は、前記正弦波信号の最小値、又は前記余弦波信号の最小値と前記第1閾値との間の値であり、
前記第1事象は、前記正弦波信号が前記第1閾値、前記第2閾値、及び前記第3閾値のうち、いずれかの閾値を跨ぐことであり、
前記第2事象は、前記余弦波信号が前記第1閾値、前記第2閾値、及び前記第3閾値のうち、いずれかの閾値を跨ぐことである、
請求項1に記載の回転数算出方法。
【請求項3】
前記モータ制御装置は、前記アナログ信号に基づいて、前記モータの回転数を算出するR/Dコンバータを更に備え、
前記回数に基づいて算出した前記モータの回転数と、前記R/Dコンバータが算出した前記モータの回転数とが相違する場合、前記制御部が前記モータを停止させることと、
を含む請求項1に記載の回転数算出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転数算出方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、R/Dコンバータを用いたモータの回転数算出に関する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-259347号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、モータ制御装置において、モータの制御について安全性を担保するには、モータの回転数を算出する手段に冗長性が求められる。一方で、R/Dコンバータは、高価であるため、R/Dコンバータを二つ設ける場合には、モータ制御装置のコストが上昇してしまうことを抑制できなかった。
【課題を解決するための手段】
【0005】
上記目的を達成する回転数算出方法は、直流電力を出力するバッテリと、前記バッテリから出力される直流電力の供給を受けるインバータと、前記インバータから出力される交流電力が供給されるモータと、前記モータの回転子の回転角度に関するアナログ信号を出力するレゾルバと、前記アナログ信号をデジタル信号に変換するA/D変換回路と、前記A/D変換回路が変換したデジタル信号であって、前記回転子の回転角度に関する正弦波信号、及び余弦波信号に基づいて、前記インバータの動作を制御する制御部と、を備えるモータ制御装置において、前記制御部が実行する前記モータの回転数算出方法であって、前記正弦波信号が閾値を跨いだ第1事象を検出することと、前記余弦波信号が閾値を跨いだ第2事象を検出することと、前記正弦波信号を整流した正弦整流波信号と、前記余弦波信号を整流した余弦整流波信号との大小関係が入れ替わった第3事象を検出することと、前記第1事象と、前記第2事象と、前記第3事象とが、所定時間内に検出された回数に基づいて、前記モータの回転数を算出することと、を特徴とする。
【0006】
かかる構成によれば、モータの回転数を算出する手段に冗長性を持たせつつ、モータ制御装置のコスト上昇を抑制できる。
上記目的を達成する回転数算出方法において、前記閾値は、第1閾値と、第2閾値と、第3閾値とを含み、前記第1閾値は、前記A/D変換回路の分解能の中央値であり、前記第2閾値は、前記正弦波信号の最大値、又は前記余弦波信号の最大値と前記第1閾値との間の値であり、前記第3閾値は、前記正弦波信号の最小値、又は前記余弦波信号の最小値と前記第1閾値との間の値であり、前記第1事象は、前記正弦波信号が前記第1閾値、前記第2閾値、及び前記第3閾値のうち、いずれかの閾値を跨ぐことであり、前記第2事象は、前記余弦波信号が前記第1閾値、前記第2閾値、及び前記第3閾のうち、いずれかの値を跨ぐことであってもよい。かかる構成によれば、精度よくモータの回転数を算出することができる。
【0007】
上記目的を達成する回転数算出方法において、前記モータ制御装置は、前記アナログ信号に基づいて、前記モータの回転数を算出するR/Dコンバータを更に備え、前記回数に基づいて算出した前記モータの回転数と、前記R/Dコンバータが算出した前記モータの回転数とが相違する場合、前記モータを停止させることと、を特徴とする。かかる構成によれば、モータの制御に係る安全性を向上することができる。
【発明の効果】
【0008】
本発明によれば、モータの回転数を算出する手段に冗長性を持たせつつ、モータ制御装置のコスト上昇を抑制できる。
【図面の簡単な説明】
【0009】
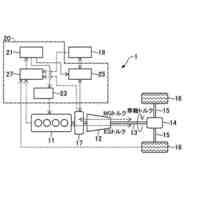
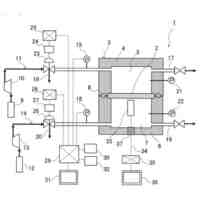
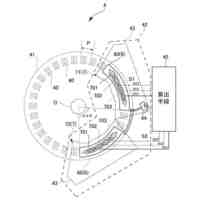
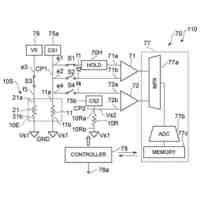
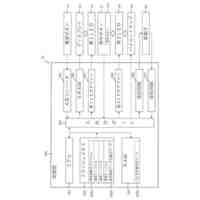
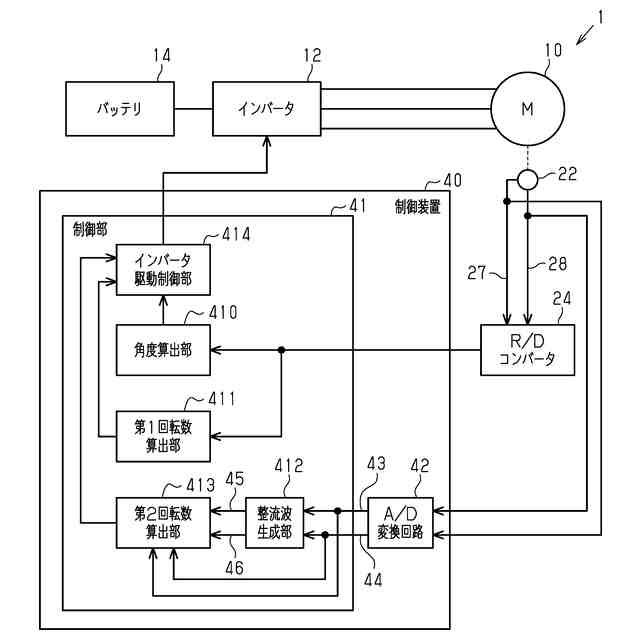
図1は、モータ制御装置1の説明に用いられる図である。
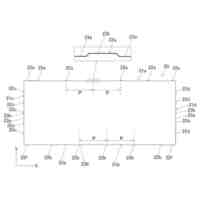
図2は、各種信号の説明に用いられる図である。
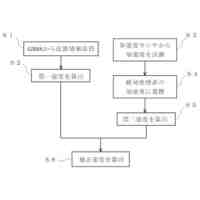
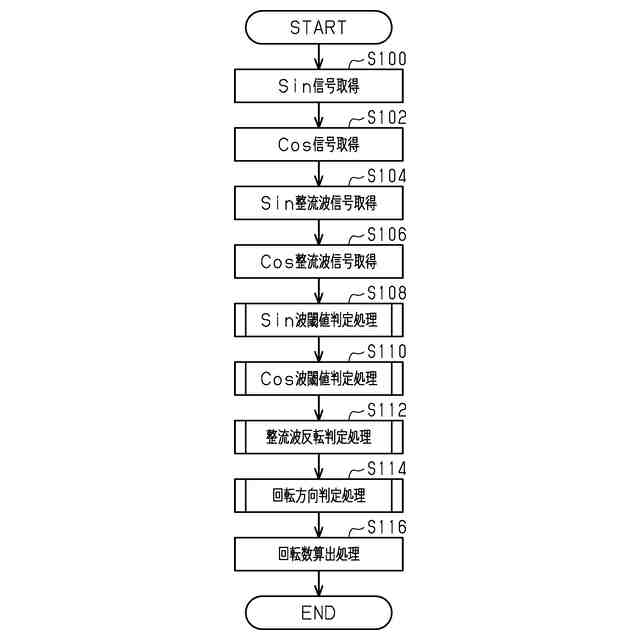
図3は、第2回転数算出部413の処理の説明に用いられるフローチャートである。
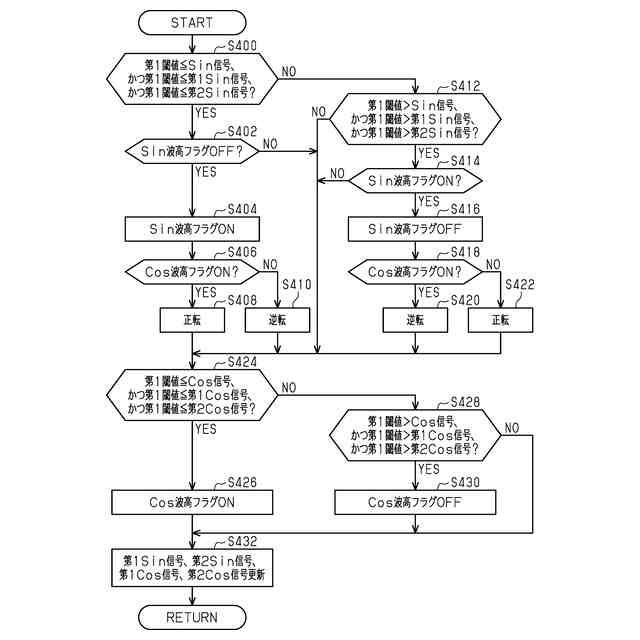
図4は、Sin波閾値判定処理の説明に用いられるフローチャートである。
図5は、整流波反転判定処理の説明に用いられるフローチャートである。
図6は、回転方向判定処理の説明に用いられるフローチャートである。
【発明を実施するための形態】
【0010】
<実施形態>
以下、回転数算出方法の一実施形態を図1~図6に従って説明する。
[全体構成]
図1に示すように、回転数算出方法を実現するモータ制御装置1は、例えば、モータ10と、インバータ12と、バッテリ14と、レゾルバ22と、R/Dコンバータ24と、制御装置40とを備える。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
自動倉庫
2日前
株式会社豊田自動織機
産業車両
2日前
株式会社豊田自動織機
回転数算出方法
2日前
株式会社豊田中央研究所
動力装置
2日前
株式会社豊田中央研究所
ハイブリッド車両の制御装置
2日前
株式会社大真空
センサ
15日前
東レ株式会社
液体展開用シート
1か月前
日本碍子株式会社
ガスセンサ
8日前
日本FC企画株式会社
特性試験装置
11日前
学校法人同志社
測位システム
3日前
日本精機株式会社
基板及び表示装置
3日前
アズビル株式会社
圧力センサ
8日前
株式会社トプコン
植物センサ
26日前
日本FC企画株式会社
特性試験装置
1日前
アズビル株式会社
湿度センサ
23日前
株式会社ミツトヨ
エンコーダ
9日前
株式会社ミツトヨ
変位測定装置
22日前
キヤノン電子株式会社
サーボ加速度計
1か月前
キヤノン電子株式会社
サーボ加速度計
1か月前
株式会社東芝
センサ
22日前
株式会社小野測器
回転計測装置
22日前
株式会社東芝
センサ
8日前
アズビル株式会社
濃度計測装置
2日前
株式会社ミツトヨ
自動測定装置
2日前
株式会社ミツトヨ
自動測定装置
2日前
キヤノン電子株式会社
サーボ加速度計
1か月前
本多電子株式会社
水中探知装置
2日前
株式会社クボタ
作業車両
29日前
エスペック株式会社
環境試験装置
8日前
アズビル株式会社
検査用プローブ
16日前
積水ハウス株式会社
測定治具
8日前
トヨタ自動車株式会社
異音解析方法
22日前
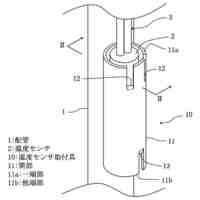
株式会社ノーリツ
温度センサ取付具
9日前
個人
レーザージャイロ応用重力場計測装置
10日前
古河電気工業株式会社
漏水検知構造
9日前
株式会社ノーリツ
温度センサ取付具
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ