TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025028560
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2023133460
出願日
2023-08-18
発明の名称
移動体の制御装置、移動体、移動体の制御方法、およびプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
11/36 20060101AFI20250221BHJP(制御;調整)
要約
【課題】移動体に搭載された磁気ギヤードモータの脱調を抑制することができる制御装置を提供する。
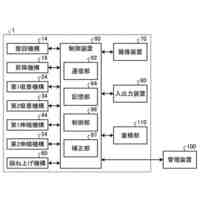
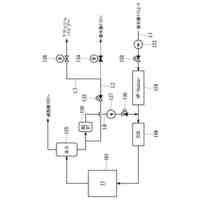
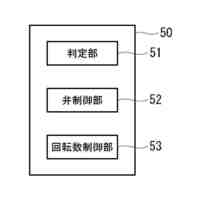
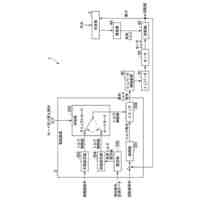
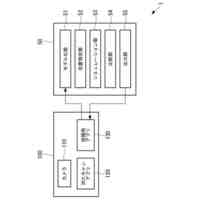
【解決手段】移動体の制御装置は、トルク制限値を操作者が手動で設定するマニュアルモードと、前記トルク制限値を自動で設定するオートモードとを切り替える切替部と、前記マニュアルモードに切り替えられた場合に、前記トルク制限値を前記操作者が指定した値に設定する手動設定部と、前記オートモードに切り替えられた場合に、前記推進器から前記磁気ギヤードモータに伝達される負荷トルク、および前記移動体の状態を表す計測データの少なくとも一方に基づいて前記トルク制限値を設定する自動設定部と、前記推進器の回転数を指定する回転数指令と前記推進器の回転数の計測データとの差に基づき前記磁気ギヤードモータの電気トルクを調整するトルク指令を、前記トルク制限値で制限するリミッタと、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
磁気ギヤードモータに回転駆動される推進器を有する移動体の制御装置であって、
前記磁気ギヤードモータの電気トルクを制限するトルク制限値を操作者が手動で設定するマニュアルモードと、前記トルク制限値を自動で設定するオートモードとを切り替える切替部と、
前記マニュアルモードに切り替えられた場合に、前記トルク制限値を前記操作者が指定した値に設定する手動設定部と、
前記オートモードに切り替えられた場合に、前記推進器から前記磁気ギヤードモータに伝達される負荷トルク、および前記移動体の状態を表す計測データの少なくとも一方に基づいて前記トルク制限値を設定する自動設定部と、
前記推進器の回転数を指定する回転数指令と前記推進器の回転数の計測データとの差に基づき前記磁気ギヤードモータの電気トルクを調整するトルク指令を、前記トルク制限値で制限するリミッタと、
を備える移動体の制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記自動設定部は、前記移動体の状態と前記トルク制限値との関係を予め定めた第1制限値情報を参照して、前記移動体の状態に応じた第1トルク制限値を前記トルク制限値として設定する、
請求項1に記載の移動体の制御装置。
【請求項3】
前記移動体の状態を表す計測データを含む状態変数に基づいて、前記負荷トルクを推定する推定部をさらに備え、
前記自動設定部は、前記負荷トルクと前記トルク制限値との関係を予め定めた第2制限値情報を参照して、推定した前記負荷トルクに応じた第2トルク制限値を前記トルク制限値として設定する、
請求項1に記載の移動体の制御装置。
【請求項4】
前記移動体の状態を表す計測データを含む状態変数に基づいて、前記負荷トルクを推定する推定部をさらに備え、
前記自動設定部は、
前記移動体の状態と前記トルク制限値との関係を予め定めた第1制限値情報を参照して、前記移動体の状態に応じた第1トルク制限値を決定し、
前記負荷トルクと前記トルク制限値との関係を予め定めた第2制限値情報を参照して、推定した前記負荷トルクに応じた第2トルク制限値を決定し、
前記第1トルク制限値および前記第2トルク制限値のうち、値が小さい方を前記トルク制限値として設定する、
請求項1に記載の移動体の制御装置。
【請求項5】
前記推定部は、前記状態変数に基づいて所定時刻先の将来の前記負荷トルクおよび前記電気トルクを推定し、
前記自動設定部は、推定した将来の前記負荷トルクおよび前記電気トルクに基づいて、前記トルク制限値を設定する、
請求項3に記載の移動体の制御装置。
【請求項6】
前記推定部は、前記状態変数に基づいて所定時刻先の将来の前記負荷トルクおよび前記電気トルクを推定し、
前記自動設定部は、推定した将来の前記負荷トルクおよび前記電気トルクに基づいて、前記トルク制限値を設定する、
請求項4に記載の移動体の制御装置。
【請求項7】
磁気ギヤードモータに回転駆動される推進器を有する移動体の制御装置であって、
前記磁気ギヤードモータの電気トルクを制限するトルク制限値を操作者が手動で設定するマニュアルモードと、前記トルク制限値を自動で設定するオートモードとを切り替える切替部と、
前記マニュアルモードに切り替えられた場合に、前記トルク制限値を前記操作者が指定した値に設定する手動設定部と、
前記オートモードに切り替えられた場合に、前記推進器から前記磁気ギヤードモータに伝達される負荷トルク、および前記移動体の状態を表す計測データの少なくとも一方に基づいて前記トルク制限値を設定する自動設定部と、
前記トルク制限値に基づいて、前記推進器の回転数を指定する回転数指令、および前記移動体の舵角を指定する舵角指令の少なくとも一方を制限する制限値を演算する制限値演算部と、
前記回転数指令および前記舵角指令の少なくとも一方を前記制限値で制限するリミッタと、
を備える移動体の制御装置。
【請求項8】
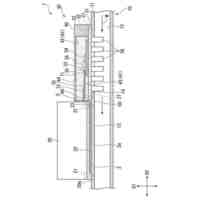
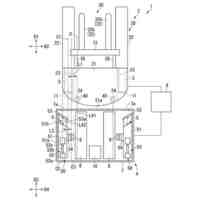
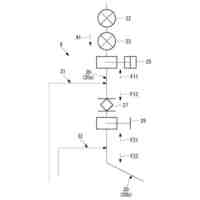
低速ロータおよび高速ロータを有する磁気ギヤードモータと、
前記磁気ギヤードモータに回転駆動される推進器と、
進行方向を変更する舵取機と、
請求項1から7のいずれか一項に記載の制御装置と、
を備える移動体。
【請求項9】
前記低速ロータと前記推進器との間に設けられ、前記高速ロータおよび前記低速ロータの最大伝達トルクを超えないように、前記推進器および前記低速ロータの間で伝達されるトルクを制限するトルク制限機構をさらに備える、
請求項8に記載の移動体。
【請求項10】
前記低速ロータと前記推進器との間に設けられ、前記高速ロータおよび前記低速ロータのねじれ角変動を減衰するフライホイールをさらに備える、
請求項8に記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の制御装置、移動体、移動体の制御方法、およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
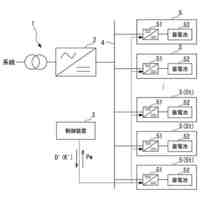
船舶や車両などの移動体には、移動体を任意の方向、任意の速度で移動させる推進系が搭載されている(例えば、特許文献1を参照)。
【0003】
近年、船舶や車両などの移動体の推進系の電動化が進んでいる。たとえば、船舶については、既存のディーゼルエンジンや蒸気タービンと比較して、電動機は配置の自由度に優れ、さらに蓄電池と組み合わせることで効率や信頼性の向上が期待できる。
【0004】
電動機を使用するには、その回転数を推進器の要求範囲に合わせるため、機械式減速機を併用するか、あるいは定格回転数が低くなるように特別に設計した電動機を用いる必要がある。しかしながら、機械式減速機を併用する場合は、振動や騒音の発生や、定期的な保守が必要といったデメリットがある。また、定格回転数を低くした低速の電動機を使用する場合は、極数を増やすため電動機のサイズ(直径)が大きくなるため、設置スペースに制限のある移動体に搭載することが困難となるデメリットがある。
【0005】
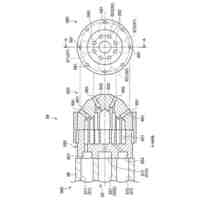
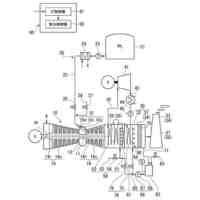
このため、電動機として磁磁気ギヤードモータを用いることが考えられている。磁気ギヤードモータは、高速ロータおよび低速ロータからなる磁気ギヤ部を備える。高速ロータおよび低速ロータは磁気ばねにより非接触でトルクを伝達する。この磁気ばねによって低速ロータは高速ロータと所定の減速比で同期して回転する。つまり、磁気ギヤードモータは、機械式減速機なしで回転数を推進器に合わせて調整することができる。さらに、磁気ギヤードモータは、一般的な電動機(たとえば同期電動機)ほど直径を大きくすることなく、推進器の要求する回転数を出力することができるので、設置スペースに制限のある移動体にも適用可能となる。
【先行技術文献】
【特許文献】
【0006】
特開2022-99788号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
一方で、磁気ギヤードモータは、異物巻き込みなどによる過負荷や、船舶のクラッシュ・アスターンのような急激な反転操作などにより、磁気ばねの最大伝達トルクを超えるトルクが磁気ギヤ部に生じると、高速ロータおよび低速ロータが脱調してトルク伝達機能を喪失する可能性がある。脱調は、入力エネルギが遮断されれば自然に解消されるが、解消されるまでの期間に最大伝達トルクを振幅とし、高速ロータと低速ロータの電気的な速度差に比例する周波数で変動する交番トルクが生じる。この交番トルクは、磁気ギヤードモータの回転軸系の固有振動モードを励起するおそれがある。固有振動モードが励起された場合、回転軸系から騒音が生じる可能性や、さらには回転軸や周辺の機器が損傷する可能性がある。
【0008】
脱調を抑制する方法の一つとして、最大伝達トルクを大きくすることが挙げられる。これは本質的かつ確実な方法ではあるが、最大伝達トルクを大きくするためには、磁気ギヤ部の磁石量を増やす必要がある。そうすると、磁気ギヤードモータのサイズ、重量、コストの増大を招き、機械式減速機や低速の大径電動機に対する優位性が低下してしまう。
【0009】
本開示の目的は、移動体に搭載された磁気ギヤードモータの脱調を抑制することができる移動体の制御装置、移動体、移動体の制御方法、およびプログラムを提供することにある。
【課題を解決するための手段】
【0010】
本開示の一態様によれば、移動体の制御装置は、磁気ギヤードモータに回転駆動される推進器を有する移動体の制御装置であって、前記磁気ギヤードモータの電気トルクを制限するトルク制限値を操作者が手動で設定するマニュアルモードと、前記トルク制限値を自動で設定するオートモードとを切り替える切替部と、前記マニュアルモードに切り替えられた場合に、前記トルク制限値を前記操作者が指定した値に設定する手動設定部と、前記オートモードに切り替えられた場合に、前記推進器から前記磁気ギヤードモータに伝達される負荷トルク、および前記移動体の状態を表す計測データの少なくとも一方に基づいて前記トルク制限値を設定する自動設定部と、前記推進器の回転数を指定する回転数指令と前記推進器の回転数の計測データとの差に基づき前記磁気ギヤードモータの電気トルクを調整するトルク指令を、前記トルク制限値で制限するリミッタと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
栽培ハウス
11日前
三菱重工業株式会社
電力変換装置
11日前
三菱重工業株式会社
蓄電池システム
4日前
三菱重工業株式会社
把持装置および方法
4日前
三菱重工業株式会社
把持装置および方法
4日前
三菱重工業株式会社
バッテリ交換システム
1日前
三菱重工業株式会社
バッテリ交換システム
1日前
三菱重工業株式会社
液浸冷却装置及びその制御方法
4日前
三菱重工業株式会社
ボイラプラント及びその運転方法
11日前
三菱重工業株式会社
把持装置及び把持装置の制御方法
4日前
三菱重工業株式会社
把持装置、制御方法及びプログラム
4日前
三菱重工業株式会社
電力制御システムおよび電力制御方法
4日前
三菱重工業株式会社
ポータブルサーバシステム、及び移動体
1日前
三菱重工業株式会社
調節機構及び発電プラント並びに調整方法
5日前
三菱重工業株式会社
コンテナ型データセンタ及びその制御方法
4日前
三菱重工業株式会社
文書処理装置及び文書処理方法並びにプログラム
11日前
三菱重工業株式会社
制御装置、発電設備、制御方法、及び制御プログラム
5日前
三菱重工業株式会社
ボイラ
11日前
三菱重工業株式会社
移動体の制御装置、移動体、移動体の制御方法、およびプログラム
1日前
三菱重工業株式会社
燃料搬送装置及びこれを備えた流動床燃焼装置並びに燃料供給方法
11日前
三菱重工業株式会社
制御装置、空調シミュレートシステム、制御方法および制御プログラム
11日前
三菱重工業株式会社
蓄電システムの制御装置、蓄電システム、蓄電システムの制御方法、プログラム
4日前
三菱重工業株式会社
ガスタービン設備、及び燃焼システム
今日
個人
方向検出器
3か月前
ugo株式会社
移動体
3か月前
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
25日前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
コフロック株式会社
流量制御装置
26日前
トヨタ自動車株式会社
自律移動体
3か月前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ