TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019691
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123429
出願日
2023-07-28
発明の名称
ずり搬出システムにおけるホイールローダおよびその自動運転方法
出願人
株式会社フジタ
代理人
個人
主分類
E21F
13/08 20060101AFI20250131BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】省力化および安全性の向上を達成することでずり搬出作業を効率化し、トンネル工事の施工期間の短縮化を達成できるホイールローダを提供する。
【解決手段】トンネル工事におけるずり搬出システムにおいて、ホイールローダが切羽前とずり仮置き場との間を往復し、ホイールローダの自動運転制御装置140が、3次元スキャナS11により得られる3次元データと、可視光カメラS12により得られる可視光画像データと、サーマルカメラS13により得られる赤外線画像データとに基づいて、切羽での発破完了および切羽前のずりを認識し、発破完了を認識すると切羽前のずりをずり積載部に積載して所定地点へ移動し、ずり積載部に積載されたずりを投入するように制御する。
【選択図】図5
特許請求の範囲
【請求項1】
切羽と坑口との間に少なくともずり積込み機を配置し、前記切羽前のずりを少なくとも前記ずり積込み機を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおいて、
ずり積載部を有し、前記切羽前と前記ずり積込み機から前記切羽側にある所定地点との間を往復するホイールローダであって、
3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、
少なくとも前記ずり積込み機と通信可能な通信部と、
前記センサ部の出力に基づいて、前記ホイールローダの走行および前記ずり積載部の駆動を制御する自動運転制御部と、
を有し、
前記自動運転制御部が、
a)前記3次元スキャナにより得られる3次元データと、前記可視光カメラにより得られる可視光画像データと、前記サーマルカメラにより得られる赤外線画像データと、に基づいて、前記ホイールローダの位置、前記切羽での発破完了、および前記切羽前のずり領域をそれぞれ認識し、
b)発破完了を認識すると、前記切羽前のずりを前記ずり積載部に積載し、前記所定地点へ移動し、前記ずり積載部に積載されたずりを前記所定地点へ投入するように制御する、
ことを特徴とするホイールローダ。
続きを表示(約 1,300 文字)
【請求項2】
前記自動運転制御部が、所定量のずりを前記所定地点へ投入すると、前記ずり積込み機へ投入終了を通知する、ことを特徴とする請求項1記載のホイールローダ。
【請求項3】
前記自動運転制御部が、前記切羽前のずりを前記所定地点へ投入し終えると、前記ずり積込み機へ積載終了を通知する、ことを特徴とする請求項1記載のホイールローダ。
【請求項4】
前記自動運転制御部が、前記ホイールローダを発破前に所定の待機場所で待機させ、前記発破完了後に前記切羽前と前記所定地点との間を往復させてずりを運搬し、前記切羽前のずりを前記所定地点へ投入し終えると、前記所定の待機場所に戻るように制御する、ことを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項5】
前記自動運転制御部は少なくとも1つのプロセッサを含み、前記a)を機械学習モデルを用いて実行する、ことを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項6】
前記ずり積載部が側方に揺動可能なサイドダンプ方式であることを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項7】
前記所定地点は前記ずり積込み機のずり掻き込み領域であることを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項8】
前記所定地点と前記ずり積込み機との間にシャトルカーが設けられ、前記シャトルカーが前記所定地点のずりを前記ずり積込み機のずり掻き込み領域へ搬送することを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項9】
前記ずり積込み機からずりをずり運搬車、クラッシャあるいはダンプへ積載することを特徴とする請求項1-3のいずれか1項記載のホイールローダ。
【請求項10】
切羽と坑口との間に少なくともずり積込み機を配置し、前記切羽前のずりを少なくとも前記ずり積込み機を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおいて、ずり積載部と、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、少なくとも前記ずり積込み機と通信可能な通信部と、少なくとも1つのプロセッサと、を有し、前記切羽前と前記ずり積込み機から前記切羽側にある所定地点との間を往復するホイールローダの自動運転制御方法であって、
前記少なくとも1つのプロセッサが、
a)機械学習モデルを用いて、前記3次元スキャナにより得られる3次元データと、前記可視光カメラにより得られる可視光画像データと、前記サーマルカメラにより得られる赤外線画像データと、に基づいて、前記ホイールローダの位置、前記切羽での発破完了、および前記切羽前のずり領域をそれぞれ認識し、
b)発破完了を認識すると、前記切羽前のずりを前記ずり積載部に積載し、前記所定地点へ移動し、前記ずり積載部に積載されたずりを前記所定地点へ投入するように制御する、
ことを特徴とするホイールローダの自動運転制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はずり搬出システムに係り、特に切羽で発生したずりを積載してずり仮置き場まで運搬するホイールローダの自動運転技術に関する。
続きを表示(約 4,300 文字)
【背景技術】
【0002】
山岳地のトンネル工事では、岩盤を掘削する工法として発破工法が採用されている。発破により切羽前に発生したずりは速やかに坑口へ搬出される必要である。このずり搬出作業はトンネル施工サイクルにおいて大きなウェイトを占める。そこでトンネル工事の工期短縮のために効率的なずり搬出システムがいくつか提案されている。
【0003】
特許文献1に開示されたずり搬出方法によれば、切羽とクラッシャーとの中間地点にずり仮置き場を設け、そこにずり積込み機を配置し、さらにずり積込み機の坑口側にずり運搬車を配置する。ホイールローダは切羽前とずり仮置き場との間を往復し、発破により生じた切羽前のずりをずり仮置き場まで運搬して積載する。ずり積込み機は、ずり仮置き場に積載されたずりを掻き込んでずり運搬車に積載する。ずり運搬車はずり積込み機とクラッシャとの間を往復し、積載されたずりをクラッシャに投入する。クラッシャにより破砕されたずりは連続ベルトコンベア装置によって坑口に向けて搬送される。
【0004】
このようにホイールローダは、切羽前とずり仮置き場との間を往復するので、切羽前とクラッシャとの間を往復する場合に比べて、往復移動に要する時間を大幅に短縮することができ、トンネル工事の施工期間の短縮化、コストダウンを達成できる。
【先行技術文献】
【特許文献】
【0005】
特開2011-047209号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、ホイールローダによるずり搬送は発破直後のトンネル素掘り面での作業となり、狭い限られた空間での往復移動を強いられる。このためにホイールローダを操作するオペレータの負荷が大きくなり、オペレータの拘束時間が長くなるという問題があった。特にズリ運搬待ちによるサイクルロスの発生がトンネル工事の施工期間の短縮化を困難にしていた。
【0007】
本発明は前記事情に鑑み案出されたものであり、その目的は、省力化および安全性の向上を達成することでずり搬出作業を効率化し、トンネル工事の施工期間の短縮化を達成できるホイールローダおよびその自動運転方法を提供することにある。
【課題を解決するための手段】
【0008】
上述の目的を達成するため、本発明は、切羽と坑口との間に少なくともずり積込み機を配置し、前記切羽前のずりを少なくとも前記ずり積込み機を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおいて、ずり積載部を有し、前記切羽前と前記ずり積込み機の前記切羽側の所定地点との間を往復するホイールローダであって、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、少なくとも前記ずり積込み機と通信可能な通信部と、前記センサ部の出力に基づいて、前記ホイールローダの走行および前記ずり積載部の駆動を制御する自動運転制御部と、を有し、前記自動運転制御部が、a)前記3次元スキャナにより得られる3次元データと、前記可視光カメラにより得られる可視光画像データと、前記サーマルカメラにより得られる赤外線画像データと、に基づいて、前記ホイールローダの位置、前記切羽での発破完了、および前記切羽前のずり領域をそれぞれ認識し、b)発破完了を認識すると、前記切羽前のずりを前記ずり積載部に積載し、前記所定地点へ移動し、前記ずり積載部に積載されたずりを前記所定地点へ投入するように制御する、ことを特徴とする。
前記自動運転制御部が、所定量のずりを前記所定地点へ投入すると、前記ずり積込み機へ投入終了を通知することができる。
前記自動運転制御部が、前記切羽前のずりを前記所定地点へ投入し終えると、前記ずり積込み機へ積載終了を通知することができる。
前記自動運転制御部が、前記ホイールローダを発破前に所定の待機場所で待機させ、前記発破完了後に前記切羽前と前記所定地点との間を往復させてずりを運搬し、前記切羽前のずりを前記所定地点へ投入し終えると、前記所定の待機場所に戻るように制御する、ことができる。
前記自動運転制御部は少なくとも1つのプロセッサを含み、前記a)を機械学習モデルを用いて実行することができる。
前記ずり積載部は側方に揺動可能なサイドダンプ方式を採用できる。
前記所定地点は前記ずり積込み機のずり掻き込み領域であってもよい。あるいは、前記所定地点と前記ずり積込み機との間にシャトルカーを設け、前記シャトルカーが前記所定地点のずりを前記ずり積込み機のずり掻き込み領域へ搬送することもできる。
前記ずり積込み機からずりをずり運搬車、クラッシャあるいはダンプへ積載することもできる。
上述の目的を達成するため、本発明は、切羽と坑口との間に少なくともずり積込み機を配置し、前記切羽前のずりを少なくとも前記ずり積込み機を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおいて、ずり積載部と、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、少なくとも前記ずり積込み機と通信可能な通信部と、少なくとも1つのプロセッサと、を有し、前記切羽前と前記ずり積込み機の前記切羽側の所定地点との間を往復するホイールローダの自動運転制御方法であって、前記少なくとも1つのプロセッサが、a)機械学習モデルを用いて、前記3次元スキャナにより得られる3次元データと、前記可視光カメラにより得られる可視光画像データと、前記サーマルカメラにより得られる赤外線画像データと、に基づいて、前記ホイールローダの位置、前記切羽での発破完了、および前記切羽前のずり領域をそれぞれ認識し、b)発破完了を認識すると、前記切羽前のずりを前記ずり積載部に積載し、前記所定地点へ移動し、前記ずり積載部に積載されたずりを前記所定地点へ投入するように制御する、ことを特徴とする。
前記少なくとも1つのプロセッサが、所定量のずりを前記所定地点へ投入すると、前記ずり積込み機へ投入終了を通知することができる。
前記少なくとも1つのプロセッサが、前記切羽前のずりを前記所定地点へ投入し終えると、前記ずり積込み機へ積載終了を通知することができる。
前記少なくとも1つのプロセッサが、発破前に前記ホイールローダを所定の待機場所で待機させ、前記発破完了後に前記切羽前と前記所定地点との間を往復してずりを運搬し、前記切羽前のずりを前記所定地点へ投入し終えると、前記所定の待機場所に戻るように制御することができる。
【発明の効果】
【0009】
本発明によれば、3次元スキャナにより得られる3次元データと、前記可視光カメラにより得られる可視光画像データと、前記サーマルカメラにより得られる赤外線画像データと、に基づいて、前記ホイールローダの位置、前記切羽での発破完了、および前記切羽前のずり領域をそれぞれ認識し、発破完了後、切羽前のずりを所定地点へ運搬して投入する、という一連の動作を自動化することで、ずり搬出作業を効率化し、省力化および安全性の向上およびトンネル工事の施工期間の短縮化を達成できる。
本発明の一態様によれば、自動運転制御部が所定量のずりを前記所定地点へ投入すると、ずり積込み機へ投入終了を通知することで、ホイールローダのずり運搬作業とずり積込み機のズリ積込み作業とを並行して実行できる。
本発明の一態様によれば、自動運転制御部が切羽前のずりを前記所定地点へ投入し終えると、ずり積込み機へ積載終了を通知することで、ホイールローダを退避場所へ移動させることができ、次の発破工程からずり搬出作業までを効率化できる。
本発明の一態様によれば、自動運転制御部ホイールローダを発破前に所定の待機場所で待機させ、発破完了後に切羽前と所定地点との間を往復させてずりを運搬し、切羽前のずりを所定地点へ投入し終えると、所定の待機場所に戻るように制御することで、所定地点へのずり投入までのずり搬出作業を自動化することができる。
本発明の一態様によれば、自動運転制御部は少なくとも1つのプロセッサを含み、前記a)を機械学習モデルを用いて実行することで、高精度の画像認識が可能となり、高い安全性と省力化を達成できる。
本発明の一態様によれば、ずり積載部が側方に揺動可能なサイドダンプ方式を採用することで、ホイールローダを大きく旋回させることなく効率的な所定地点へのずり投入が可能となる。
本発明の一態様によれば、所定地点はずり積込み機のずり掻き込み領域であってもよい。
本発明の一態様によれば、所定地点とずり積込み機との間にシャトルカーを設け、シャトルカーが所定地点のずりをずり積込み機のずり掻き込み領域へ搬送することもできる。これによりホイールローダは、切羽前からシャトルカー手前の所定地点までの間を往復移動するだけでよく、移動距離が短縮されて効率的なずり搬出が可能となる。
本発明の一態様によれば、ずり積込み機からずりをずり運搬車、クラッシャあるいはダンプへ積載することもできる。
【図面の簡単な説明】
【0010】
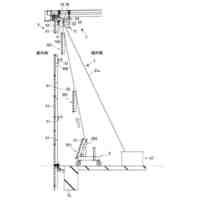
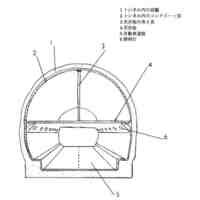
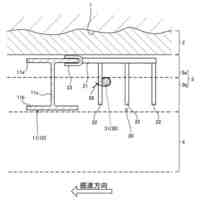
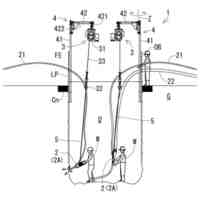
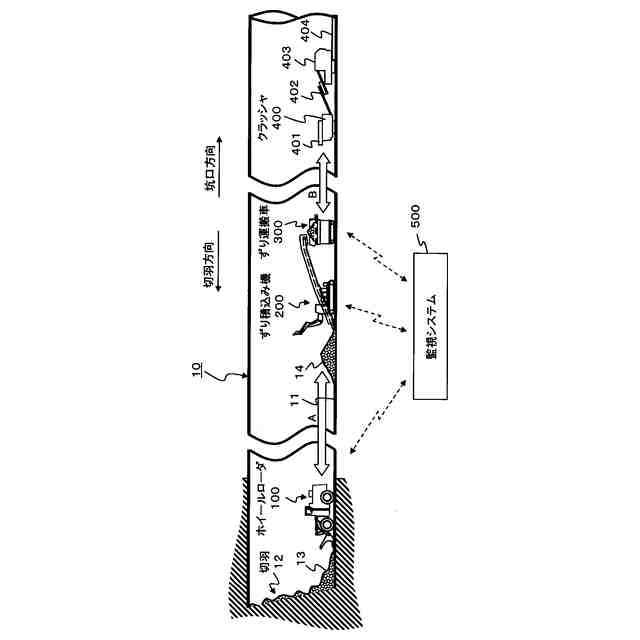
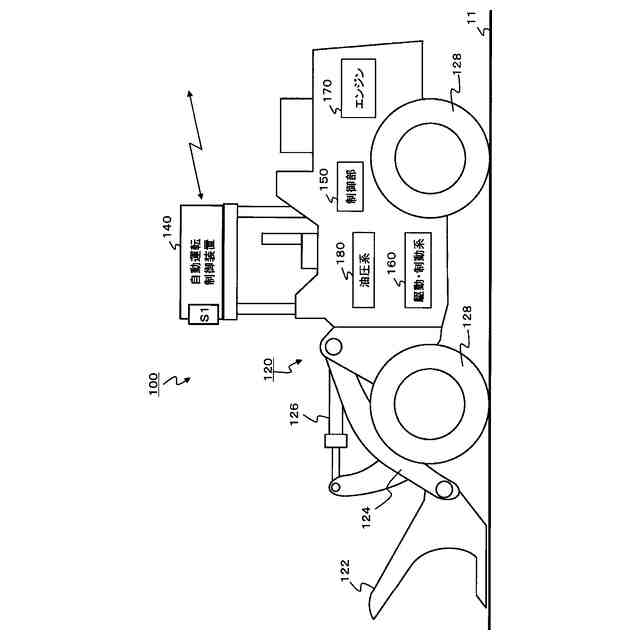
本発明の一実施形態によるずり搬送システムの動作を説明するための模式的なトンネル縦断面側面図である。
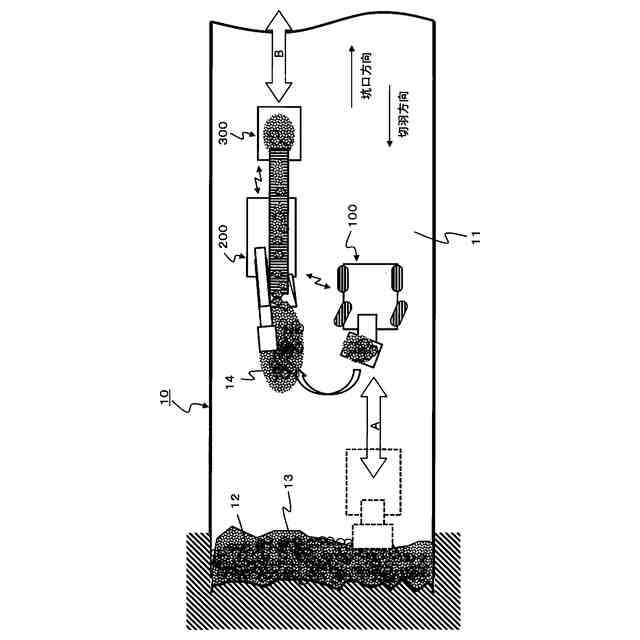
図1に例示するずり搬送システムの動作を説明するための模式的なトンネル縦断面平面図である。
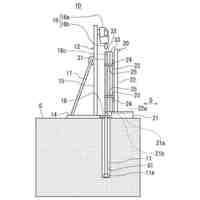
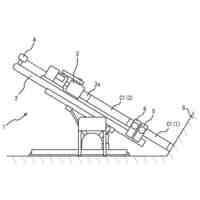
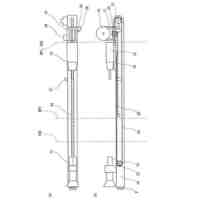
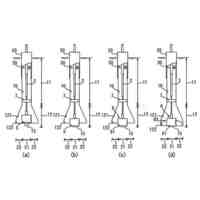
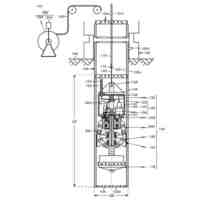
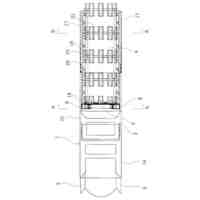
本実施形態によるホイールローダの構成を示す模式的側面図である。
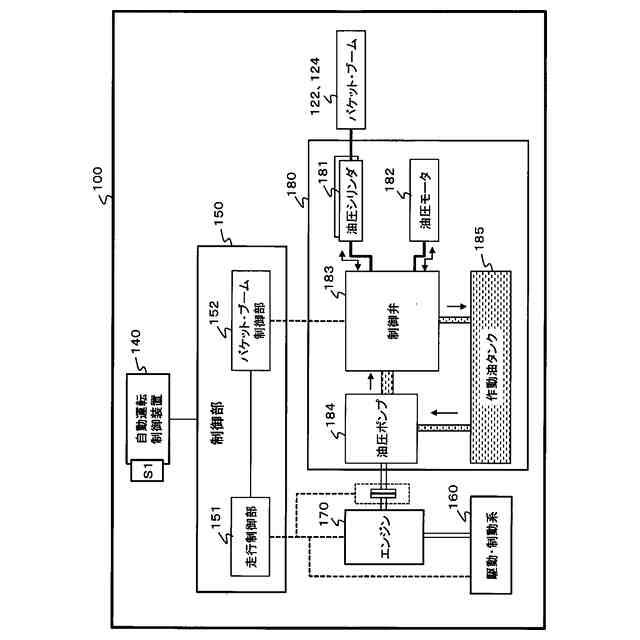
本実施形態によるホイールローダの機能的構成を示す模式的ブロック図である。
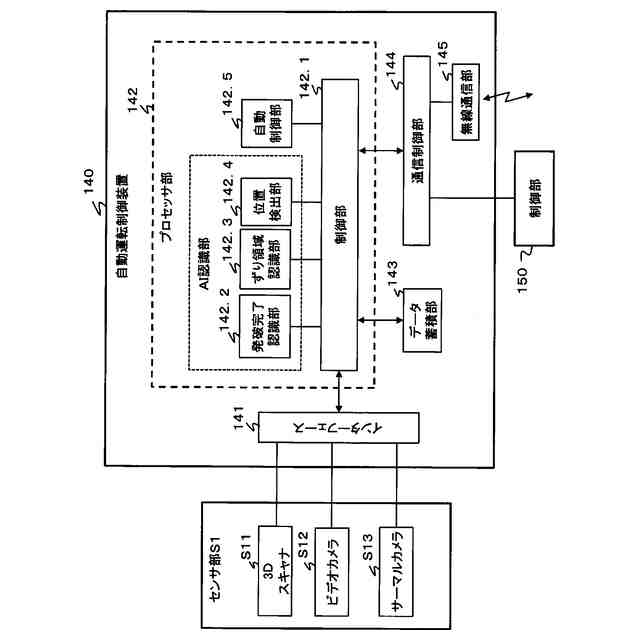
本実施形態によるホイールローダの自動運転制御装置の構成を示すブロック図である。
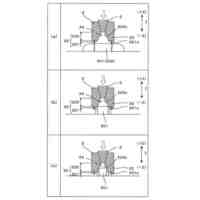
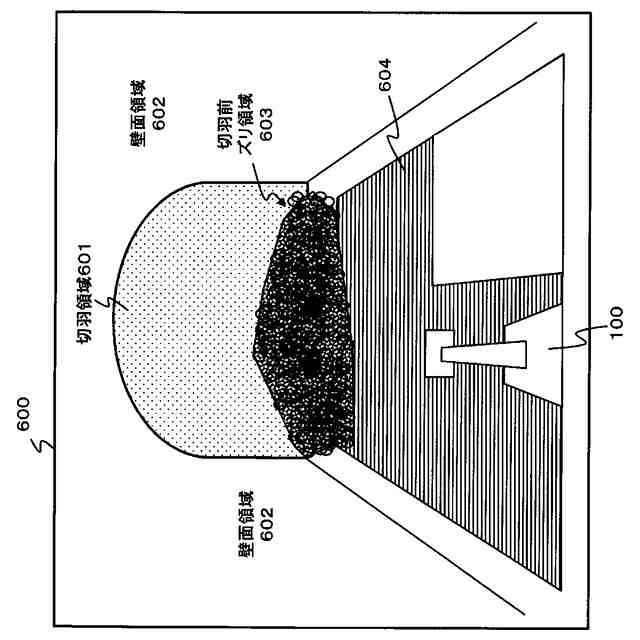
本実施形態による自動運転制御装置により認識された切羽前の画像の一例を示す模式図である。
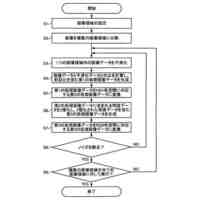
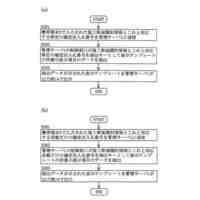
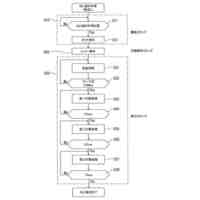
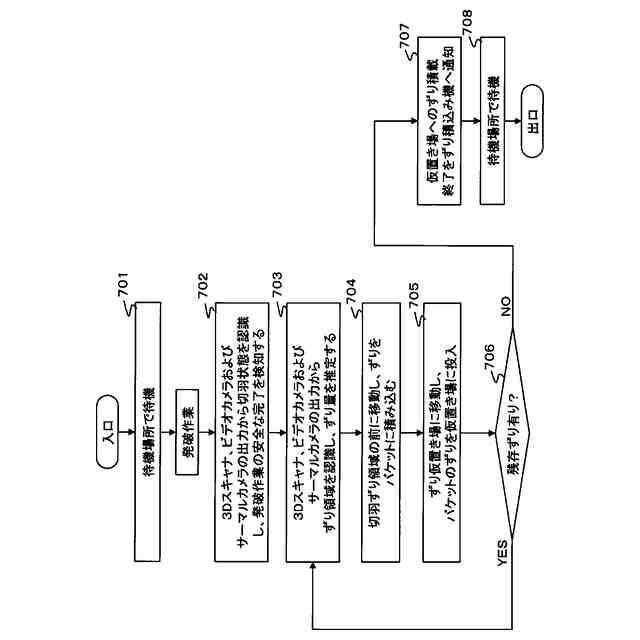
本実施形態による自動運転制御装置の動作を示すフローチャートである。
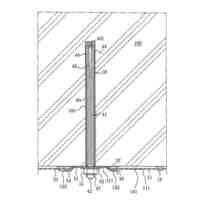
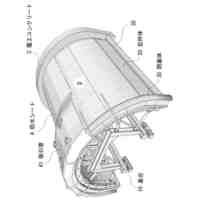
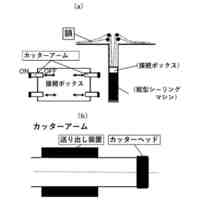
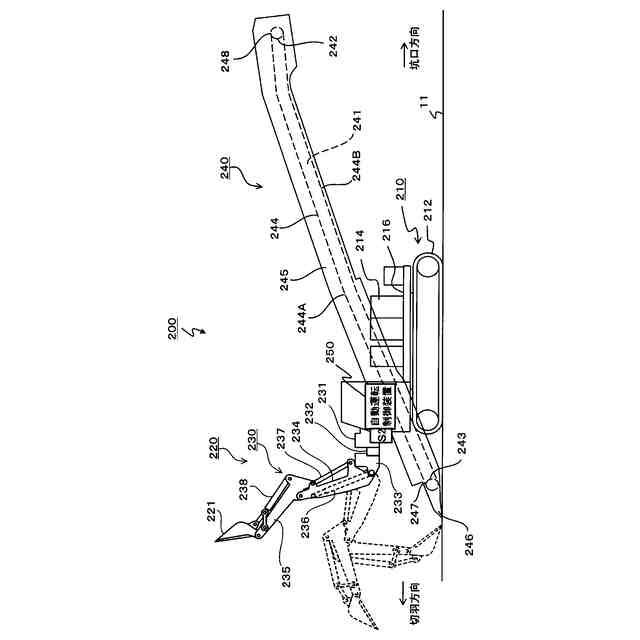
図1に示すずり搬送システムにおけるずり積込み機の側面構成図である。
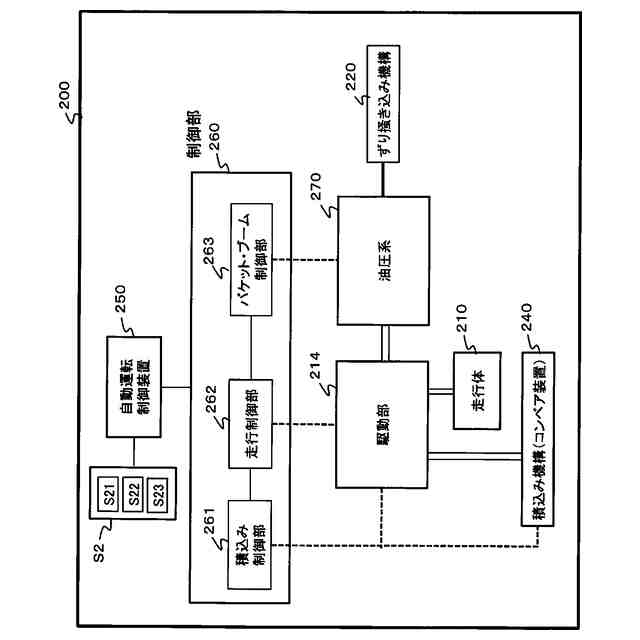
図8に示すずり積込み機の機能的構成を示す模式的ブロック図である。
本発明の他の実施形態によるずり搬送システムの動作を説明するための模式的なトンネル縦断面側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大和ハウス工業株式会社
外壁施工方法
今日
株式会社フジタ
検出対象である物体の変位量を検出する方法
8日前
個人
高速道路トンネルの強靭化法
4か月前
株式会社奥村組
シールド掘進機
29日前
日特建設株式会社
ボーリング装置
5日前
株式会社奥村組
テールシール試験装置
29日前
株式会社エステック
掘削機及び掘削装置
3か月前
日特建設株式会社
削孔方法及び削孔装置
1か月前
株式会社ケー・エフ・シー
剥落防止構造
12日前
日本車輌製造株式会社
油圧ユニット
4か月前
株式会社大林組
インバート更新工法
1か月前
大成建設株式会社
トンネルの褄部構造
20日前
株式会社ケー・エフ・シー
防水シート探傷装置
1か月前
大栄工機株式会社
トンネル防水工法
11日前
古河ロックドリル株式会社
穿孔機械
20日前
株式会社神島組
小割用工具および小割方法
18日前
鹿島建設株式会社
掘削方法
2か月前
株式会社奥村組
電力線通信設備を用いた推進方法
2か月前
西松建設株式会社
土層分布検知方法
4か月前
株式会社奥村組
シールド掘進機の後胴部の収縮方法
29日前
株式会社ケー・エフ・シー
注入材施工管理システム
4か月前
ニシオティーアンドエム株式会社
トンネル工事用作業装置
2か月前
システム計測株式会社
ケリーバ保持治具
3か月前
個人
発電用掘削方法および発電用掘削装置
4か月前
鹿島建設株式会社
トンネル掘削機
4か月前
鹿島建設株式会社
線状体敷設方法
2か月前
三桜電気工業株式会社
地盤の掘削工法及び掘削システム
1か月前
株式会社大林組
安定液管理方法及び安定液管理装置
1か月前
株式会社Lavie
土木作業装置
2か月前
岐阜工業株式会社
トンネルインバートの排水管の設置方法
1か月前
大成建設株式会社
シールドトンネルとその施工方法
2か月前
株式会社ケー・エフ・シー
補強注入構造及び地山補強工法
4か月前
古河ロックドリル株式会社
穿孔機械の制御装置
20日前
個人
オープンシールド工法用コンクリート函体
4か月前
個人
オープンシールド工法用コンクリート函体
4か月前
地中空間開発株式会社
カッタービット
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ