TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025041406
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148683
出願日
2023-09-13
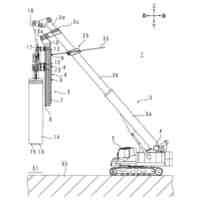
発明の名称
穿孔機械
出願人
古河ロックドリル株式会社
代理人
個人
,
個人
,
個人
主分類
E21B
7/00 20060101AFI20250318BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】コストの大幅な増加を抑制することが可能であるとともに、さく岩機の移動量を高精度に検出することが可能な、穿孔機械を提供する。
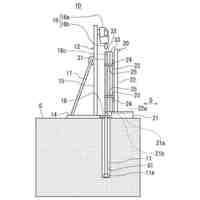
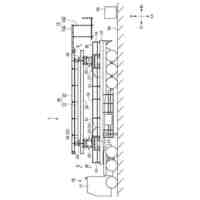
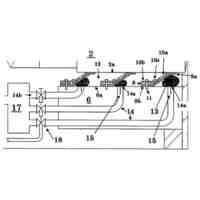
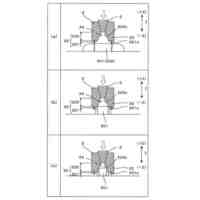
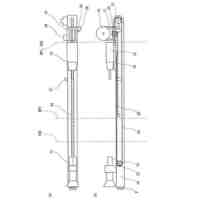
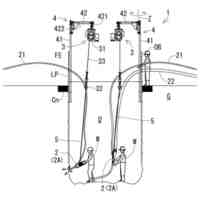
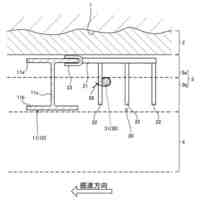
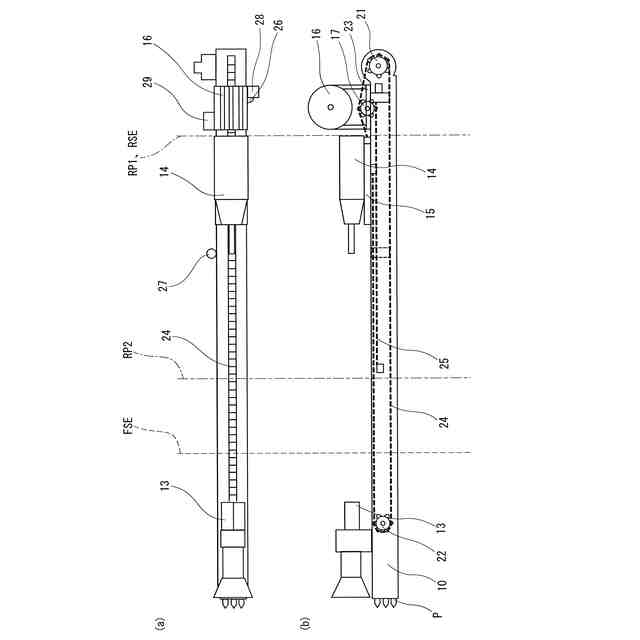
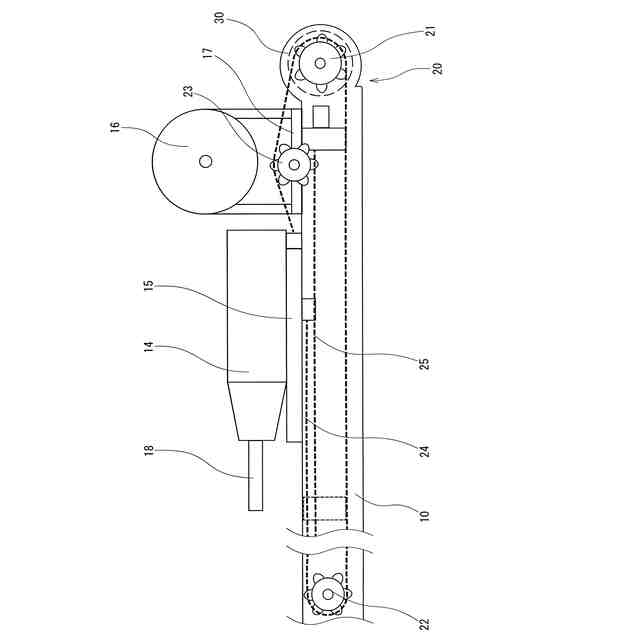
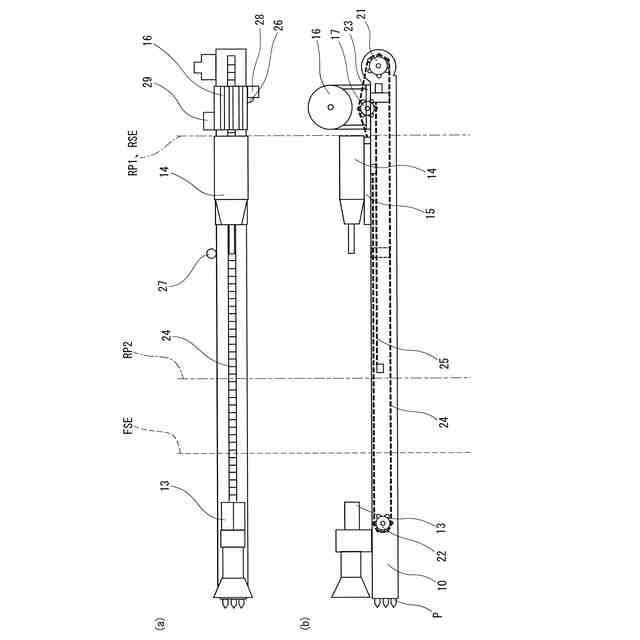
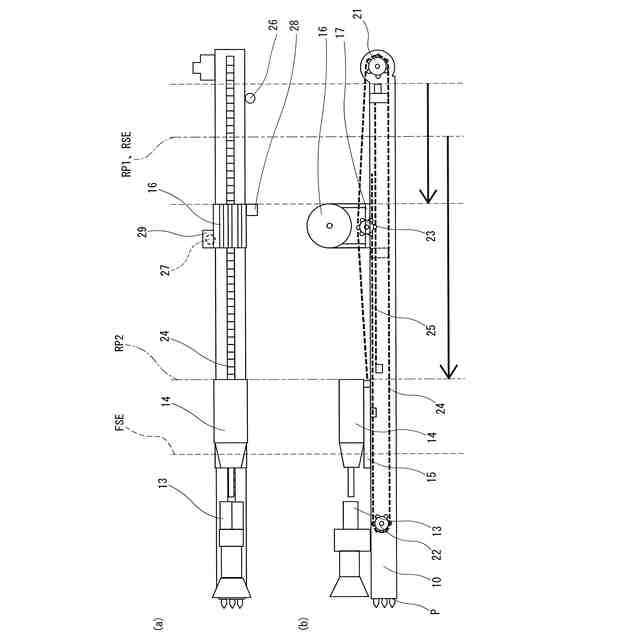
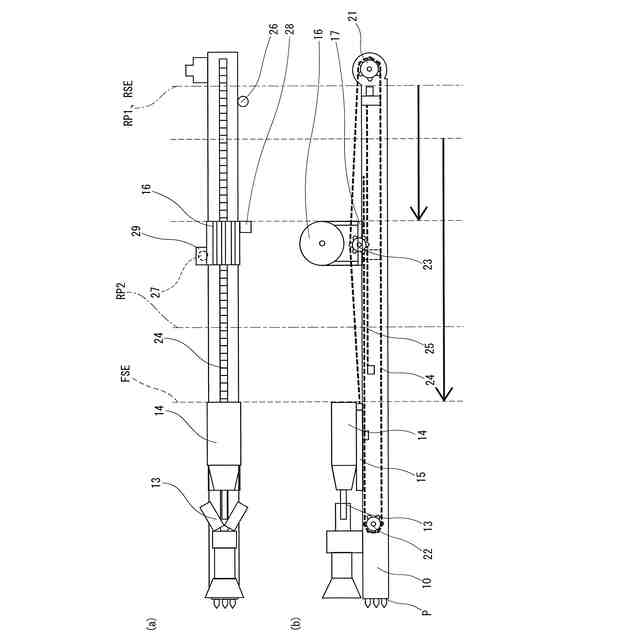
【解決手段】第一基準位置検知部26は、ガイドシェル10の左側面における駆動スプロケット21の前方に配置されており、第二基準位置検知部27はガイドシェル10の右側面における長さ方向の中央部分の後方寄りに配置されている。後に詳細を説明するが、第二基準位置検知部27の配置箇所は、図6に示すように、第一キャリッジ15が移動し、シャンクロッド18の前端がセントラライザ13の後端近傍に達したときに第二キャリッジ17が検出される位置である。なお、第一基準位置検知部26の配置されている箇所は、第二キャリッジ17が後方ストローク端RSEに位置しているときに、第二キャリッジ17を検知可能な位置である。
【選択図】図5
特許請求の範囲
【請求項1】
走行台車のブーム先端に装着されたガイドシェルと、
さく岩機を搭載して前記ガイドシェルを前進後退自在に移動する第一キャリッジと、
ホースリールを搭載して前記ガイドシェルを前進後退自在に移動する第二キャリッジと、
前記第一キャリッジ及び前記第二キャリッジを前進及び後退させる送り機構と、
前記送り機構の作動量を検出する送り機構作動量検出部と、
前記送り機構作動量検出部の検出値に基づいて、前記さく岩機のガイドシェル上における位置を示す基準位置情報を演算し記憶する基準位置情報演算記憶部と、
前記第一キャリッジ及び前記第二キャリッジのうち少なくとも一方が、前記ガイドシェルにおける後方ストローク端に位置していることを検知する第一基準位置検知部と、を備え、
前記第二キャリッジは、前記第一キャリッジの後方に配設され、該第一キャリッジに追従して動作し、
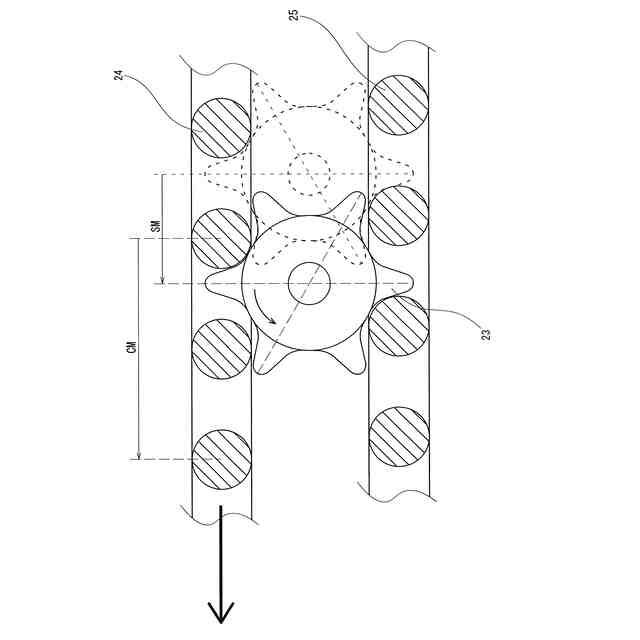
前記第二キャリッジの移動量は、前記第一キャリッジの移動量の2分の1に設定され、
前記第一基準位置検知部は、前記第一キャリッジ又は前記第二キャリッジが後方ストローク端に位置していることを検知したとき、前記基準位置情報を後方ストローク端を示す値にリセットすることを特徴とする穿孔機械。
続きを表示(約 730 文字)
【請求項2】
前記第一キャリッジが後方ストローク端に位置しているときに、前記第二キャリッジも後方ストローク端に位置していることを特徴とする請求項1に記載した穿孔機械。
【請求項3】
前記第一キャリッジを前進させるとき、前記第二キャリッジの位置を検出する第二基準位置検知部を備え、
前記第二基準位置検知部が前記第二キャリッジを検知したとき、前記基準位置情報を所定の前進位置を示す値にリセットすることを特徴とする請求項1又は請求項2に記載した穿孔機械。
【請求項4】
前記さく岩機は、前端部にシャンクロッドを備え、
前記ガイドシェルは、前部における前記さく岩機の穿孔軸線上にセントラライザを備えており、
前記シャンクロッドの前端が、前記セントラライザの後端の近傍に位置するときの前記第一キャリッジの位置を前記所定の前進位置とすることを特徴とする請求項3に記載の穿孔機械。
【請求項5】
前記第一基準位置検知部及び前記第二基準位置検知部は、前記ガイドシェルに固定されている近接センサであり、
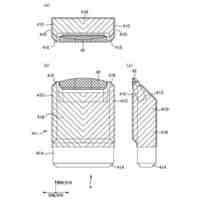
前記第二キャリッジは、前記第一基準位置検知部に検知させるための第一ドッグと、前記第二基準位置検知部に検知させるための第二ドッグとを備えていることを特徴とする請求項3に記載の穿孔機械。
【請求項6】
前記第一キャリッジは、前記所定の前進位置を超えて前進することで前方ストローク端に到達し、
前記第一キャリッジが前記所定の前進位置から前記後方ストローク端まで前進するとき、前記第二ドッグの検知信号が継続して検知されることを特徴とする請求項5に記載の穿孔機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、岩盤等に発破孔を穿孔する穿孔機械に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
岩盤等に発破孔を穿孔する既存の穿孔機械は、岩盤の奥深くに発破孔を穿孔するために様々な機構・機器を備えており、様々な機構・機器を適宜操作して、長孔の発破孔を穿孔する。このため、穿孔作業は、操作が煩雑であるとともに練度も要求されるため、作業負荷が大きいという問題がある。
【0003】
この問題に対し、穿孔機械の省力化・自動化が提案されている。
穿孔機械の自動化に際し、自動化制御を確実且つ安全に実行するためには、構成・機器の作動状態をセンシングするセンサ技術の精度の向上が求められる。
例えば、送り速度や穿孔深さを正しく検出する、または、ロッドの継ぎ足し及び切り離し作業に対応する停止位置に、さく岩機を適切に位置決めするためには、さく岩機の移動量を正確に検出することが必須となる。
【0004】
このため、穿孔機械の送り機構の作動量を正確に計測する技術として、例えば、特許文献1に開示されている技術がある。
特許文献1に開示されている技術では、周縁に所定の間隔で切欠が設けられた金属円板を送り機構のフィードモータに取付け、金属円板の切欠と対向する位置に切欠の間隔と異なる間隔で一対の近接スイッチを配設する。そして、フィードモータが回転すると、近接スイッチが金属円板の非切欠部と切欠とに交互に反応してon-offパルス信号を発生させる。このon-offパルス信号のパルス数を計数することによって、さく岩機の移動量を検出している。
【先行技術文献】
【特許文献】
【0005】
特開平10-306678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されている技術では、近接スイッチの検出限界を超える速度でさく岩機を移動させると、パルスの飛びが発生して正確な移動量の検出が不可能となる場合がある。また、さく岩機を小刻みに前後移動させると、パルスの計数を誤り、計数を誤りが誤差となって累積する場合もある。
また、穿孔機械における自動制御は年々高度化しており、さく岩機の移動量の検出も、更なる高精度化が求められるようになった。しかしながら、穿孔機械において高性能のエンコーダを採用するためには、穿孔機械の過酷な作業環境に耐えうる仕様を満足させなければならず、コストが大幅に増加するという問題がある。
【0007】
本発明は、上述した問題点を鑑み、コストの大幅な増加を抑制することが可能であるとともに、さく岩機の移動量を高精度に検出することが可能な、穿孔機械を提供することを課題とする。
【課題を解決するための手段】
【0008】
第一の発明は、走行台車のブーム先端に装着されたガイドシェルと、さく岩機を搭載して前記ガイドシェルを前進後退自在に移動する第一キャリッジと、ホースリールを搭載して前記ガイドシェルを前進後退自在に移動する第二キャリッジと、前記第一キャリッジ及び前記第二キャリッジを前進及び後退させる送り機構と、前記送り機構の作動量を検出する送り機構作動量検出部と、前記送り機構作動量検出部の検出値に基づいて、前記さく岩機のガイドシェル上における位置を示す基準位置情報を演算し記憶する基準位置情報演算記憶部と、前記第一キャリッジ及び前記第二キャリッジのうち少なくとも一方が、前記ガイドシェルにおける後方ストローク端に位置していることを検知する第一基準位置検知部と、を備え、前記第二キャリッジは、前記第一キャリッジの後方に配設され、該第一キャリッジに追従して動作し、前記第二キャリッジの移動量は、前記第一キャリッジの移動量の2分の1に設定され、前記第一基準位置検知部は、前記第一キャリッジ又は前記第二キャリッジが後方ストローク端に位置していることを検知したとき、前記基準位置情報を後方ストローク端を示す値にリセットすることを特徴とする穿孔機械である。
【0009】
第二の発明は、第一の発明に記載の前記第一キャリッジが後方ストローク端に位置しているときに、前記第二キャリッジも後方ストローク端に位置していることを特徴とする穿孔機械である。
【0010】
第三の発明は、第一の発明又は第二の発明に記載の前記第一キャリッジを前進させるとき、前記第二キャリッジの位置を検出する第二基準位置検知部を備え、前記第二基準位置検知部が前記第二キャリッジを検知したとき、前記基準位置情報を所定の前進位置を示す値にリセットすることを特徴とする穿孔機械である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
掘削機
1か月前
株式会社奥村組
シールド掘進機
4か月前
株式会社奥村組
シールド掘進機
1か月前
株式会社笠原建設
横孔形成方法
2か月前
日特建設株式会社
ボーリング装置
3か月前
花王株式会社
岩盤の掘削方法
26日前
個人
掘削機、及び、資源回収システム
2か月前
株式会社熊谷組
天井板撤去装置
2か月前
株式会社奥村組
テールシール試験装置
4か月前
株式会社奥村組
泥土圧シールド掘進機
2か月前
日特建設株式会社
削孔方法及び削孔装置
4か月前
大阪瓦斯株式会社
牽引装置
2か月前
株式会社ケー・エフ・シー
剥落防止構造
3か月前
株式会社大林組
インバート更新工法
4か月前
株式会社金澤製作所
発進坑口のエントランス装置
1か月前
大阪瓦斯株式会社
切欠開裂治具
2か月前
大成建設株式会社
トンネルの褄部構造
3か月前
株式会社ケー・エフ・シー
防水シート探傷装置
4か月前
株式会社神島組
小割用工具および小割方法
3か月前
古河ロックドリル株式会社
穿孔機械
3か月前
株式会社奥村組
電力線通信設備を用いた推進方法
5か月前
戸田建設株式会社
掘削機切削部側壁
13日前
大栄工機株式会社
トンネル防水工法
3か月前
大成建設株式会社
トンネルとその施工方法
3か月前
鹿島建設株式会社
掘削方法
5か月前
株式会社奥村組
シールド掘進機の後胴部の収縮方法
4か月前
ニシオティーアンドエム株式会社
トンネル工事用作業装置
5か月前
株式会社ケー・エフ・シー
モルタル注入管理システム
2か月前
三桜電気工業株式会社
地盤の掘削工法及び掘削システム
4か月前
鹿島建設株式会社
線状体敷設方法
5か月前
株式会社大林組
作業空間の養生設備
2か月前
株式会社大林組
カッタビット
2か月前
株式会社大林組
カッタビット
2か月前
鹿島建設株式会社
掘進管理システム
2か月前
岐阜工業株式会社
トンネルインバートの排水管の設置方法
4か月前
株式会社Lavie
土木作業装置
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ