TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041405
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148682
出願日
2023-09-13
発明の名称
穿孔機械の制御装置
出願人
古河ロックドリル株式会社
代理人
個人
,
個人
,
個人
主分類
E21B
44/00 20060101AFI20250318BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】作業負荷が軽減されつつも、コストの大幅な増加を抑制することが可能であるとともに、作業効率の低下を抑制することが可能な、穿孔機械の制御装置を提供する。
【解決手段】穿孔作業に用いる穿孔機械を構成する機器に設けたセンサの検出値に基づいて機器を自動制御する穿孔機械の制御装置であって、穿孔作業の全体を、複数の動作要素によって構成される作業単位の集合体として定義し、穿孔機械を操作する作業者が印加する一度の単一操作信号によって、一つの作業単位を構成する複数の動作要素を逐次自動で実行する。
【選択図】図7
特許請求の範囲
【請求項1】
穿孔作業に用いる穿孔機械を構成する機器に設けたセンサの検出値に基づいて前記機器を自動制御する穿孔機械の制御装置であって、
前記穿孔作業の全体を、複数の動作要素によって構成される作業単位の集合体として定義し、
前記穿孔機械を操作する作業者が印加する一度の単一操作信号によって、一つの前記作業単位を構成する複数の動作要素を逐次自動で実行する穿孔機械の制御装置。
続きを表示(約 590 文字)
【請求項2】
前記作業単位のそれぞれは、
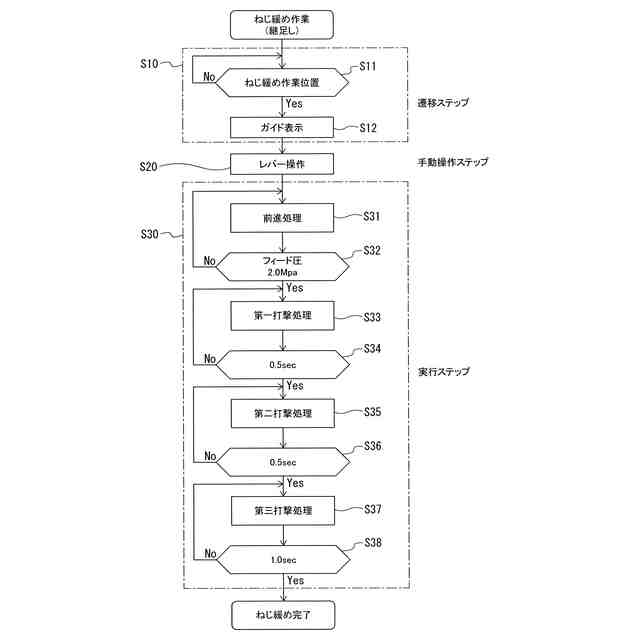
次の前記作業単位で最初に実行する前記動作要素を実行する準備が完了したことを検出した後に前記作業者へ前記次の作業単位の内容を通知する遷移ステップと、
前記遷移ステップの後に前記作業者が前記単一操作信号を印加すると前記複数の動作要素を逐次自動で実行する実行ステップと、を含む請求項1に記載した穿孔機械の制御装置。
【請求項3】
前記遷移ステップで通知する内容は、次に印加する必要がある前記単一操作信号のガイド表示を含む請求項2に記載した穿孔機械の制御装置。
【請求項4】
前記穿孔機械は、送り機構を備え、
前記単一操作信号は、前記作業者が前記送り機構の操作に用いるフィード操作レバーを倒す操作に応じて生成される信号であり、
前記フィード操作レバーを倒す方向は、次に実行される動作要素の中で前記送り機構を進行させる方向と一致する方向に設定されている請求項1に記載した穿孔機械の制御装置。
【請求項5】
前記単一操作信号を印加している最中、又は前記動作要素の実行中に、前記作業者によって予め設定した所定の操作信号が印加されると、前記作業単位を構成する動作要素とは異なる別の動作要素を実行する請求項1から4のうちいずれか1項に記載した穿孔機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、岩盤等に発破孔を穿孔する穿孔機械の制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
岩盤等に発破孔を穿孔する既存の穿孔機械としては、岩盤の奥深くに発破孔を穿孔するために様々な機構・機器を備えており、様々な機構・機器を適宜操作して、長孔の発破孔を穿孔する。このため、穿孔作業は、非常に多くの機器を作動させる必要があり、それぞれの機器に対応する操作手段の操作を習熟するのは容易ではないという問題がある。また、穿孔作業は、個々の操作を確実に且つ的確なタイミングで実行しなければならず、作業者には大きな負担となるという問題がある。
【0003】
この問題に対し、穿孔機械の省力化・自動化を実現する技術として、例えば、特許文献1に開示されている技術がある。特許文献1に開示されている技術では、穿孔機械が備える各機構・機器の全てに設けたセンサの検出値に基づいて、制御装置が各機構・機器に制御信号を出力し、穿孔作業を全自動制御する。
【先行技術文献】
【特許文献】
【0004】
特開平10-061368号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている技術のような全自動制御は、制御信号に対して制御対象となる機構・機器が確実に動作を完了したことを検出してから、次のステップへと移行する。しかしながら、穿孔機械は、過酷な環境の中で稼働するため、機構・機器やセンサに対し、剛性や信頼性が高いレベルにあることが求められ、実際の穿孔機械に適用するためには、設備コストが大幅に増加するという問題がある。
また、特許文献1に開示されている技術のように、制御が全自動化された装置は、上述したように、機構・機器が確実に動作を完了したことを確認しながら処理が進行する。このため、ある程度の熟練度を有する作業者にとっては、手動で操作するよりも作業の進捗が遅くなって作業効率が低下すると認識され、敬遠される場合もあるという問題がある。
【0006】
本発明は、上述した問題点を鑑み、作業負荷が軽減されつつも、コストの大幅な増加を抑制することが可能であるとともに、作業効率の低下を抑制することが可能な、穿孔機械の制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る穿孔機械の制御装置は、穿孔作業に用いる穿孔機械を構成する機器に設けたセンサの検出値に基づいて、機器を自動制御する穿孔機械の制御装置である。また、穿孔機械の制御装置では、穿孔作業の全体を、複数の動作要素によって構成される作業単位の集合体として定義する。そして、穿孔機械を操作する作業者が印加する一度の単一操作信号によって、一つの作業単位を構成する複数の動作要素を逐次自動で実行する。
【発明の効果】
【0008】
本発明によれば、作業負荷が軽減されつつも、コストの大幅な増加を抑制することが可能であるとともに、作業効率の低下を抑制することが可能な、穿孔機械の制御装置を提供することが可能となる。
【図面の簡単な説明】
【0009】
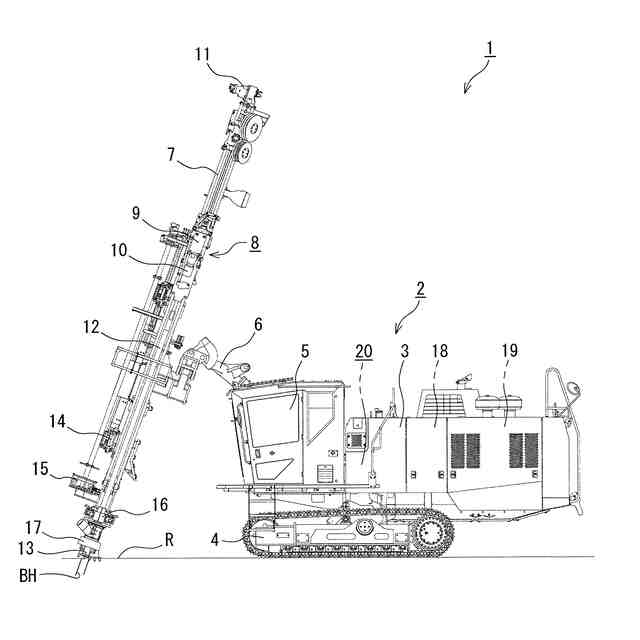
穿孔機械の構成を示す図である。
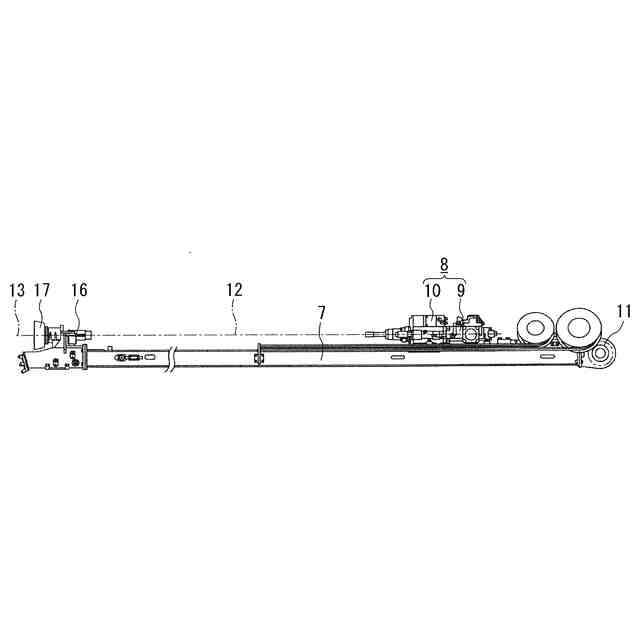
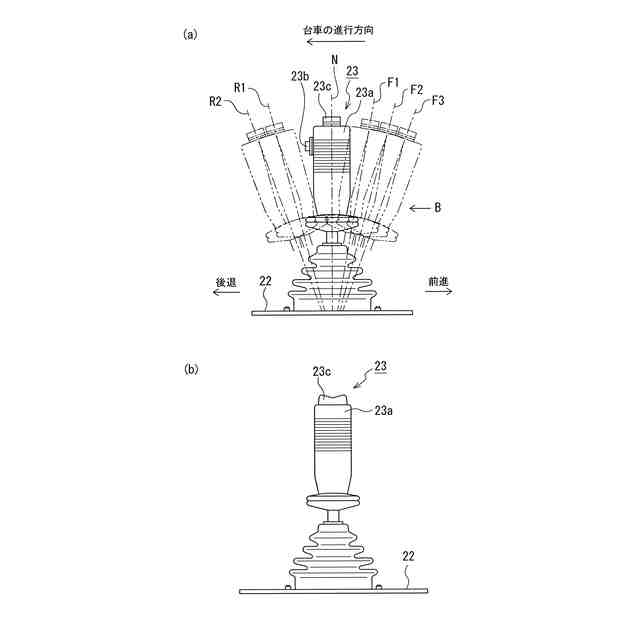
さく岩機及びビットの構成を示す図である。
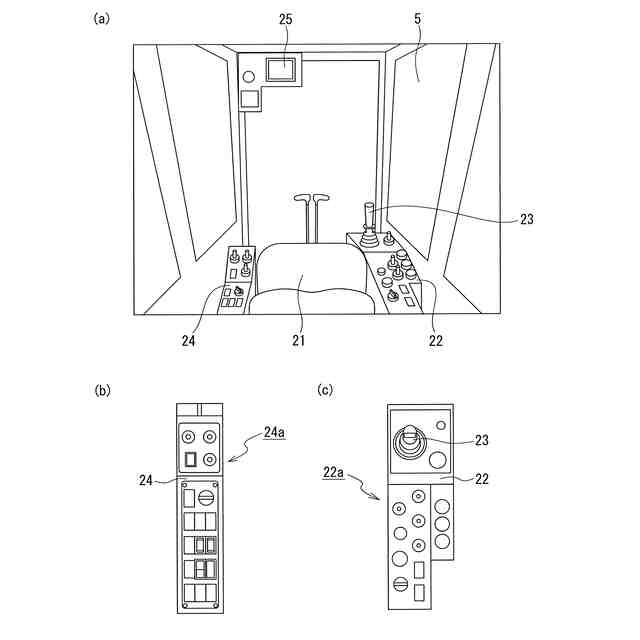
オペレータキャビンの内部を示す図であり、図3(a)はオペレータキャビンの全景を示す図、図3(b)は左コンソールボックスを示す図、図3(a)は右コンソールボックスを示す図である。
フィード操作レバーの構成を示す図であり、図4(a)はフィード操作レバーの側面図、図4(b)は図4(a)のB線矢視図である。
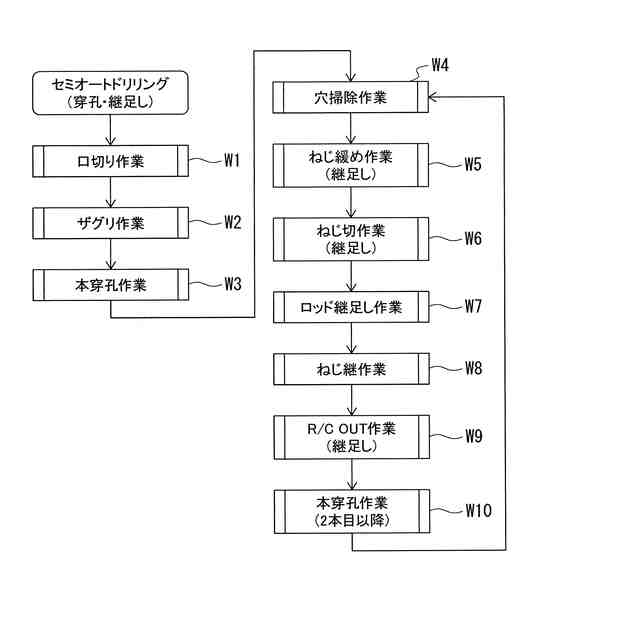
穿孔機械の制御装置における制御ブロックを示す図であり、穿孔作業と継足し作業に関する作業単位を示す図である。
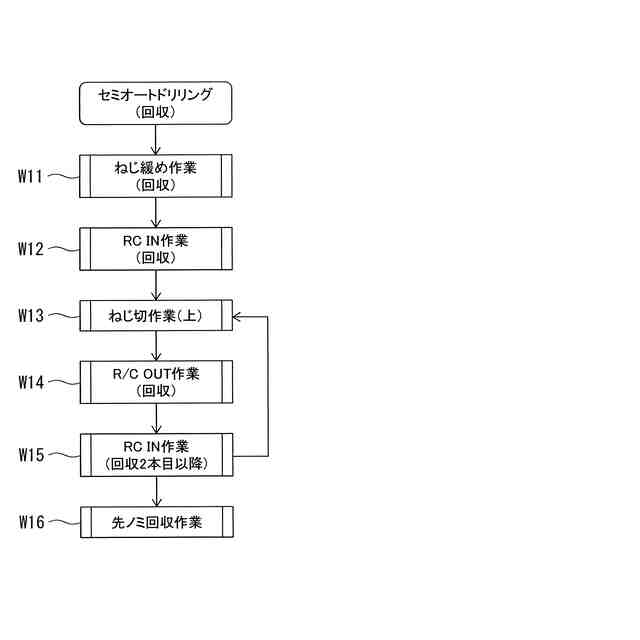
穿孔機械の制御装置における制御ブロックを示す図であり、回収作業に関する作業単位を示す図である。
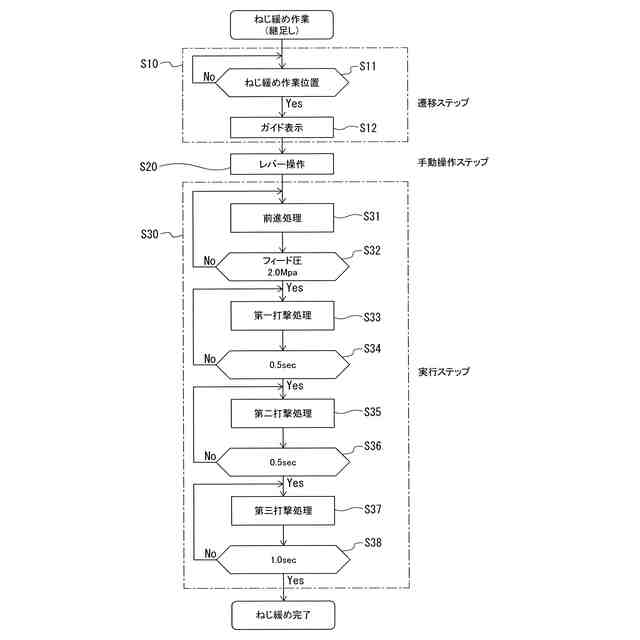
穿孔機械の制御装置における制御フローを示す図であり、ねじ緩め(継足し)の作業単位を構成する動作要素を示す図である。
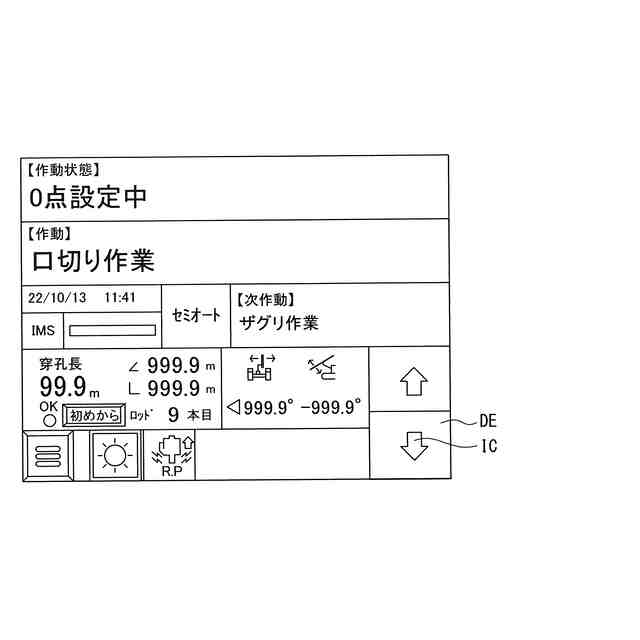
動作要素のうち[口切り作業]の作動状態を表示したモニター画面を示す図である。
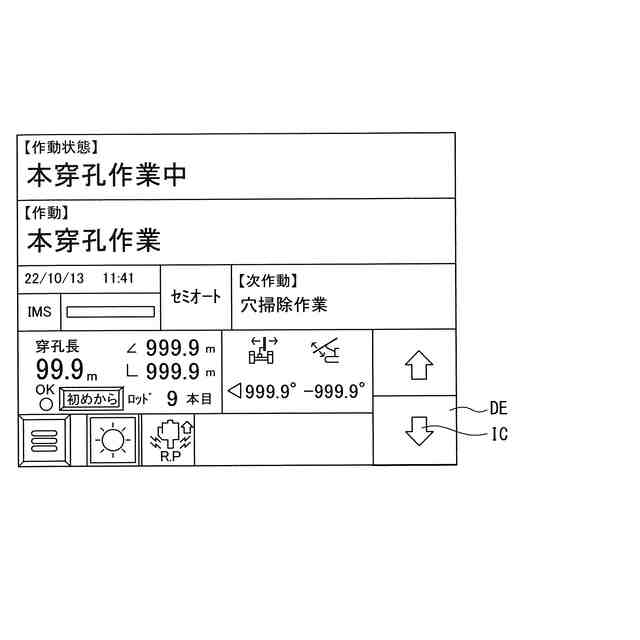
動作要素のうち[本穿孔作業]の作動状態を表示したモニター画面を示す図である。
穿孔作業と継足し作業に係る工程を個別に設定する際のモニター画面を示す図である。
回収作業に係る工程を個別に設定する際のモニター画面を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明について、図面を適宜参照しつつ説明する。なお、図面は模式的なものである。そのため、厚さと平面寸法との関係、比率等は現実のものとは異なる場合があることに留意すべきであり、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれている場合がある。また、以下に示す実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の材質、形状、構造、配置等を下記の実施形態に特定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ