TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014118
公報種別
公開特許公報(A)
公開日
2025-01-29
出願番号
2024112076
出願日
2024-07-12
発明の名称
移動目標検出のためのレーダ点群の処理方法及び装置
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G01S
13/89 20060101AFI20250122BHJP(測定;試験)
要約
【課題】本発明の実施例は、移動目標検出のためのレーダ点群の処理方法及び装置を提供する。
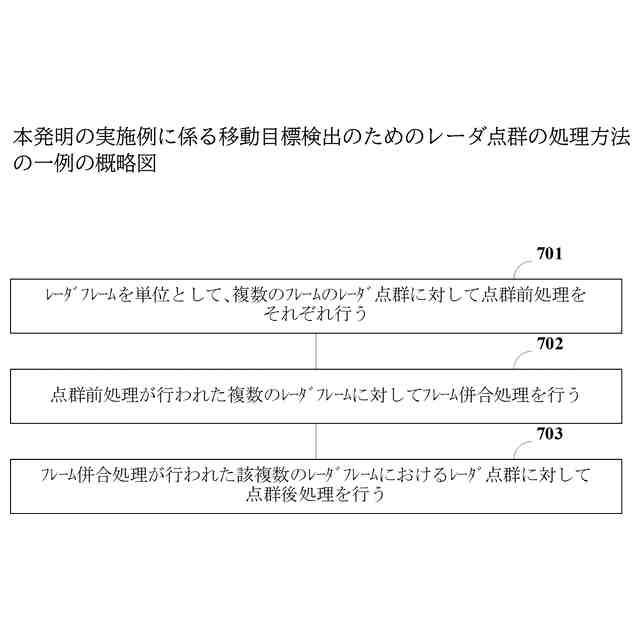
【解決手段】該方法は、レーダフレームを単位として、複数のフレームのレーダ点群に対して点群前処理をそれぞれ行うステップと、点群前処理が行われた複数のレーダフレームに対してフレーム併合処理を行うステップと、フレーム併合処理が行われた該複数のレーダフレームにおけるレーダ点群に対して点群後処理を行うステップと、を含む。本発明の実施例によれば、動作のカテゴリを限定する必要がなく、移動目標の検出を実現し、検出精度を向上させることができる。
【選択図】図7
特許請求の範囲
【請求項1】
移動目標検出のためのレーダ点群の処理装置であって、
レーダフレームを単位として、複数のフレームのレーダ点群に対して点群前処理をそれぞれ行う前処理部と、
点群前処理が行われた複数のレーダフレームに対してフレーム併合処理を行う併合処理部と、
フレーム併合処理が行われた前記複数のレーダフレームにおけるレーダ点群に対して点群後処理を行う後処理部と、を含む、装置。
続きを表示(約 1,800 文字)
【請求項2】
前記前処理部は、単一のフレームのレーダ点群に対して点群前処理を行う際に、
現在のレーダフレームにおける点群をフィルタリングし、
所定のポリシーに従って、前記レーダフレームにおける保留すべき点群を決定する、請求項1に記載の装置。
【請求項3】
前記所定のポリシーは、
前記レーダフレームにおける点群の数が第1の閾値を超えないことであり、
フィルタリング後の前記点群の数が前記第1の閾値を超えていない場合、前記前処理部は、フィルタリング後の前記点群を前記レーダフレームにおける保留すべき点群とし、
フィルタリング後の前記点群の数が前記第1の閾値を超えている場合、前記前処理部は、フィルタリング後の前記点群をサンプリングし、前記レーダフレームにおける保留すべき点群を取得し、前記レーダフレームにおける保留すべき点群の数は、前記第1の閾値を超えない、請求項2に記載の装置。
【請求項4】
前記所定のポリシーは、
前記レーダフレームにおける点群の数が併合すべき総点数の所定の割合を超えないことであり、
フィルタリング後の前記点群の数が併合すべき総点数の前記所定の割合を超えていない場合、前記前処理部は、フィルタリング後の前記点群を前記レーダフレームにおける保留すべき点群とし、
フィルタリング後の前記点群の数が併合すべき総点数の前記所定の割合を超えている場合、前記前処理部は、フィルタリング後の前記点群をサンプリングし、前記レーダフレームにおける保留すべき点群を取得し、前記レーダフレームにおける保留すべき点群の数は、前記併合すべき総点数の前記所定の割合を超えない、請求項2に記載の装置。
【請求項5】
前記併合処理部は、
現在のレーダフレームのデータに対して有効性判断を行い、
前記レーダフレームのデータが有効である場合、点群の数が少なくとも併合すべき総点数以上になるまで、前記レーダフレームから始めて、一定の数のフレーム内で、直前の各レーダフレームにおける点群を順次併合する、請求項1に記載の装置。
【請求項6】
前記レーダフレーム及び前記レーダフレームの直前の所定数のレーダフレームの点群の総数が第2の閾値未満である場合、前記併合処理部は、前記レーダフレームのデータが無効であると判定し、そうでない場合、前記レーダフレームのデータが有効であると判定する、請求項5に記載の装置。
【請求項7】
前記後処理部は、併合処理後の複数のレーダフレームにおいて、点群の空間分布特性及び/又は速度分布特性に基づいて、併合すべき総点数の点群を選択する、請求項1に記載の装置。
【請求項8】
前記後処理部は、併合処理後の複数のレーダフレームにおける全ての点群をサンプリングし、前記併合すべき総点数の点群を取得し、或いは、
前記後処理部は、前記併合処理後の複数のレーダフレームのうちの時間的に最後のフレーム以外の他のレーダフレームにおける点群を保留し、前記最後のフレームにおける点群をサンプリングし、前記併合すべき総点数の点群を取得する、請求項7に記載の装置。
【請求項9】
移動目標の検出装置であって、
複数のフレームのレーダ点群に対して点群前処理を行い、併合すべき総点数の点群を取得する請求項1乃至8の何れかに記載の装置と、
移動目標検出モデルを使用して前記併合すべき総点数の点群に対して移動目標検出を行い、移動目標を取得する検出装置と、を含む、装置。
【請求項10】
コンピュータプログラムが記憶されたメモリと、プロセッサと、を含む電子機器であって、前記プロセッサは、
レーダフレームを単位として、複数のフレームのレーダ点群に対して点群前処理をそれぞれ行うステップと、
点群前処理が行われた複数のレーダフレームに対してフレーム併合処理を行うステップと、
フレーム併合処理が行われた前記複数のレーダフレームにおけるレーダ点群に対して点群後処理を行い、併合すべき総点数の点群を取得するステップと、
移動目標検出モデルを使用して前記併合すべき総点数の点群に対して移動目標検出を行い、移動目標を取得するステップと、を含む方法を実現するように前記コンピュータプログラムを実行するように構成される、電子機器。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施例は、レーダ検出の技術分野に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
レーダ点群に基づく人体のキーポイントの検出方法は、プライバシーを侵害せず、光がなく、又は部分的に遮蔽されているシーンにおいて動作でき、且つ人体のキーポイントの実の空間位置を取得できるため、広く応用されている。
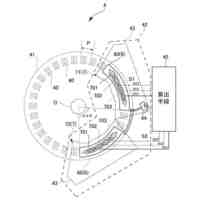
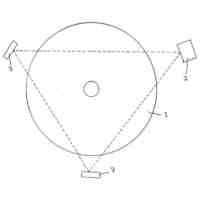
【0003】
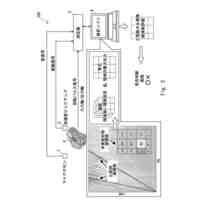
図1は、レーダ点群に基づく人体キーポイントの検出方法の応用の概略図である。図1に示すように、人体が動いている際に、レーダから対応する点群を取得し、点群から人体のキーポイント情報を検出することができ、該人体のキーポイント情報は、動作検出、行動分析及び転倒検出などに利用することができる。
【0004】
動作検出及び行動分析では、キーポイントの相対位置及び統計情報を分析することによって、動作及び行動を決定することができる。転倒検出では、人体のキーポイント位置の高さ情報に基づいて、目標が転倒したか否かを判断することができる。
【0005】
なお、上述した技術背景の説明は、本発明の技術案を明確、完全に理解させるための説明であり、当業者を理解させるために記述されているものである。これらの技術案は、単なる本発明の背景技術部分として説明されたものであり、当業者により周知されたものではない。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の発明者の発見によると、ある状況において、レーダは、一度に人体の身体の反射情報の一部しか取得できず、異なる動作について、空間と時間に点群の分布の差異が存在する。また、キーポイント検出モデルに入力されたレーダ点群の品質は、キーポイントの検出精度に直接影響を及ぼす。
【0007】
上記の技術的問題の少なくとも1つ又は同様な問題を鑑み、本発明の実施例は、検出精度を向上させることができる、移動目標検出のためのレーダ点群の処理方法及び装置を提供する。
【課題を解決するための手段】
【0008】
本発明の実施例の1つの態様では、移動目標検出のためのレーダ点群の処理装置であって、レーダフレームを単位として、複数のフレームのレーダ点群に対して点群前処理をそれぞれ行う前処理部と、点群前処理が行われた複数のレーダフレームに対してフレーム併合処理を行う併合処理部と、フレーム併合処理が行われた前記複数のレーダフレームにおけるレーダ点群に対して点群後処理を行う後処理部と、を含む、装置を提供する。
【0009】
本発明の実施例のもう1つの態様では、移動目標の検出装置であって、複数のフレームのレーダ点群に対して点群前処理を行い、併合すべき総点数の点群を取得する上記の実施例に記載の装置と、移動目標検出モデルを使用して前記併合すべき総点数の点群に対して移動目標検出を行い、移動目標を取得する検出装置と、を含む、装置を提供する。
【0010】
本発明の実施例のもう1つの態様では、コンピュータプログラムが記憶されたメモリと、プロセッサと、を含む電子機器であって、前記プロセッサは、レーダフレームを単位として、複数のフレームのレーダ点群に対して点群前処理をそれぞれ行うステップと、点群前処理が行われた複数のレーダフレームに対してフレーム併合処理を行うステップと、フレーム併合処理が行われた前記複数のレーダフレームにおけるレーダ点群に対して点群後処理を行い、併合すべき総点数の点群を取得するステップと、移動目標検出モデルを使用して前記併合すべき総点数の点群に対して移動目標検出を行い、移動目標を取得するステップと、を含む方法を実現するように前記コンピュータプログラムを実行するように構成される、電子機器。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
12日前
東レ株式会社
液体展開用シート
27日前
日本碍子株式会社
ガスセンサ
5日前
アズビル株式会社
湿度センサ
20日前
日本FC企画株式会社
特性試験装置
8日前
日本精機株式会社
基板及び表示装置
今日
株式会社トプコン
植物センサ
23日前
アズビル株式会社
圧力センサ
5日前
株式会社ミツトヨ
エンコーダ
6日前
学校法人同志社
測位システム
今日
株式会社ミツトヨ
変位測定装置
19日前
株式会社クボタ
作業車両
26日前
キヤノン電子株式会社
サーボ加速度計
27日前
株式会社東芝
センサ
19日前
株式会社小野測器
回転計測装置
19日前
キヤノン電子株式会社
サーボ加速度計
27日前
株式会社東芝
センサ
5日前
キヤノン電子株式会社
サーボ加速度計
27日前
エスペック株式会社
環境試験装置
5日前
アズビル株式会社
検査用プローブ
13日前
株式会社ノーリツ
温度センサ取付具
6日前
株式会社ノーリツ
温度センサ取付具
6日前
積水ハウス株式会社
測定治具
5日前
トヨタ自動車株式会社
異音解析方法
19日前
古河電気工業株式会社
漏水検知構造
6日前
個人
レーザージャイロ応用重力場計測装置
7日前
トヨタ自動車株式会社
NVH解析装置
19日前
日鉄テクノロジー株式会社
衝突試験装置
9日前
キヤノン株式会社
撮像装置
19日前
一丸ファルコス株式会社
コラーゲンの検出方法
今日
アズビル株式会社
距離設定形光電センサ
今日
ヒロセ電機株式会社
磁気センサ装置
12日前
株式会社トーキン
電流センサ
26日前
株式会社国際電気
試験装置
5日前
トヨタ自動車株式会社
故障兆候の検出方法
今日
中国電力株式会社
位置推定システム
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ