TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025005267
公報種別
公開特許公報(A)
公開日
2025-01-16
出願番号
2023105397
出願日
2023-06-27
発明の名称
移動体および履帯式走行体
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
55/06 20060101AFI20250108BHJP(鉄道以外の路面車両)
要約
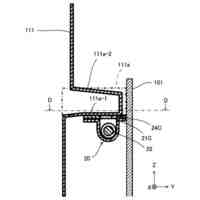
【課題】履帯式走行体を備えた移動体が超信地旋回などを行う場合でも、移動体を大型化させることなく、移動体の旋回動作軌道上に存在する物体を検知する。
【解決手段】履帯によって走行する履帯式走行体を備えて超信地旋回と信地旋回との少なくとも何れか一方が可能な移動体において、前記履帯式走行体の前記履帯の内側に、周囲の物体を検知するための物体検知装置を設置する。
【選択図】図1
特許請求の範囲
【請求項1】
履帯によって走行する履帯式走行体を備えて超信地旋回と信地旋回との少なくとも何れか一方が可能な移動体において、
前記履帯式走行体の前記履帯の内側に、周囲の物体を検知するための物体検知装置を設置する、
ことを特徴とする移動体。
続きを表示(約 790 文字)
【請求項2】
前記物体検知装置は、前記履帯式走行体の転輪を支持する構造体部に設置される、
ことを特徴とする請求項1に記載の移動体。
【請求項3】
前記物体検知装置は、前記履帯式走行体の前記構造体部における前方端部と後方端部とに設置される、
ことを特徴とする請求項2に記載の移動体。
【請求項4】
前記物体検知装置は、前記転輪の上部に、設置される、
ことを特徴とする請求項2に記載の移動体。
【請求項5】
前記物体検知装置は、前記履帯式走行体を備える本体の前面および後面に、更に設置される、
ことを特徴とする請求項1に記載の移動体。
【請求項6】
複数の前記物体検知装置は、検知範囲をオーバーラップさせることで、周囲360度の物体を検知可能である、
ことを特徴とする請求項1に記載の移動体。
【請求項7】
前記物体検知装置は、超音波センサである、
ことを特徴とする請求項1に記載の移動体。
【請求項8】
超信地旋回と信地旋回との少なくとも何れか一方が可能な移動体に設けられ、履帯によって走行する履帯式走行体において、
前記履帯式走行体の前記履帯の内側に、周囲の物体を検知するための物体検知装置を設置する、
ことを特徴とする履帯式走行体。
【請求項9】
前記物体検知装置は、前記履帯式走行体の転輪を支持する構造体部に設置される、
ことを特徴とする請求項8に記載の履帯式走行体。
【請求項10】
前記物体検知装置は、前記履帯式走行体の前記構造体部における前方端部と後方端部とに設置される、
ことを特徴とする請求項9に記載の履帯式走行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体および履帯式走行体に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、車輪に掛け回した履帯によって走行する履帯式走行体を備えた走行装置(移動体)が知られている。このような履帯式走行体を備えた移動体は、いわゆる超信地旋回や信地旋回を行うことができるため、限られたスペースでも回転動作をスムーズに行うことができる。
【0003】
特許文献1には、超信地旋回を行うことができる履帯式走行体を備えた移動体が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、履帯式走行体を備えた移動体が超信地旋回などを行う場合、移動体の旋回動作軌道上に存在する物体にぶつかってしまうことがある。
【0005】
本発明は、上記に鑑みてなされたものであって、履帯式走行体を備えた移動体が超信地旋回などを行う場合でも、移動体を大型化させることなく、移動体の旋回動作軌道上に存在する物体を検知することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、履帯によって走行する履帯式走行体を備えて超信地旋回と信地旋回との少なくとも何れか一方が可能な移動体において、前記履帯式走行体の前記履帯の内側に、周囲の物体を検知するための物体検知装置を設置する、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、履帯式走行体を備えた移動体が超信地旋回などを行う場合でも、移動体を大型化させることなく、移動体の旋回動作軌道上に存在する物体を検知することができる、という効果を奏する。
【図面の簡単な説明】
【0008】
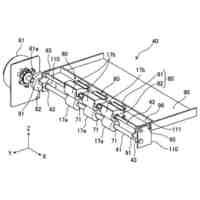
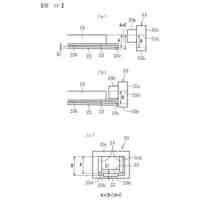
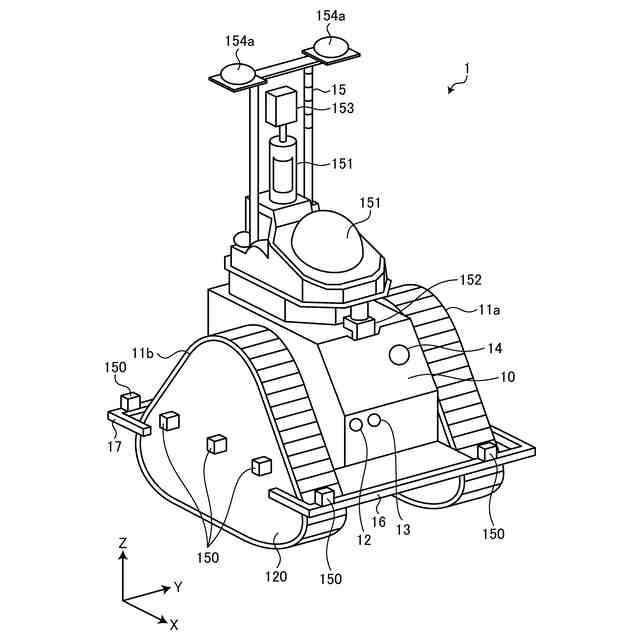
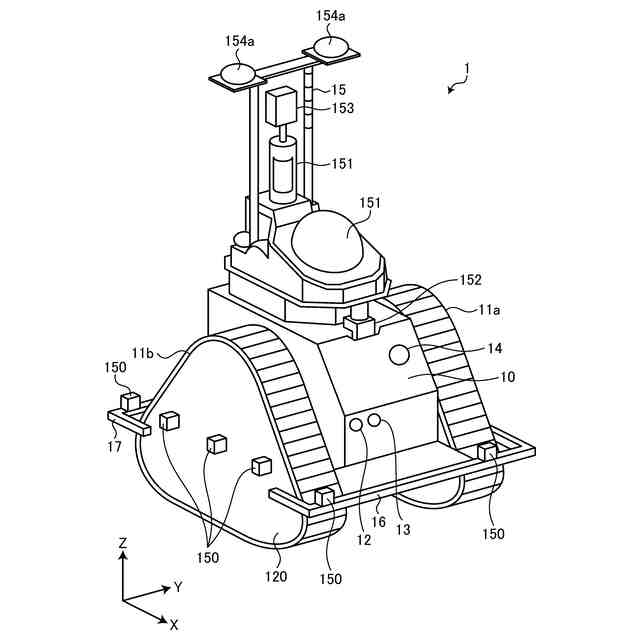
図1は、実施の形態にかかる走行装置の構成の一例を示す外観斜視図である。
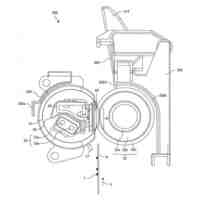
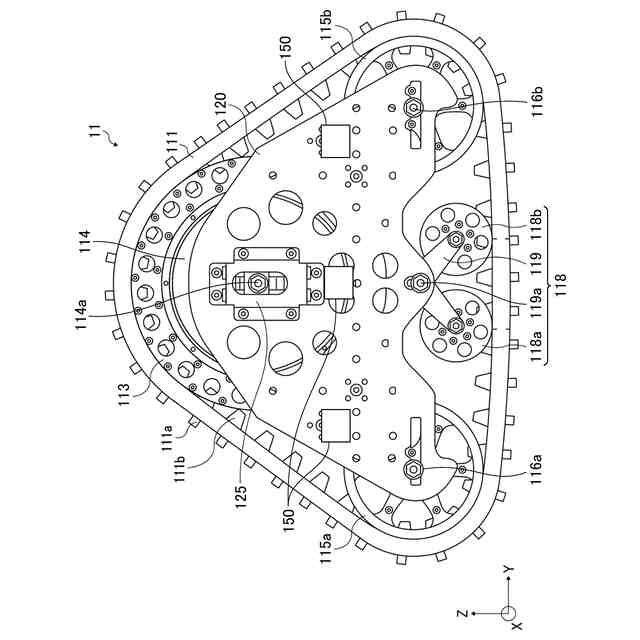
図2は、履帯式走行体の構成の一例を示す図である。
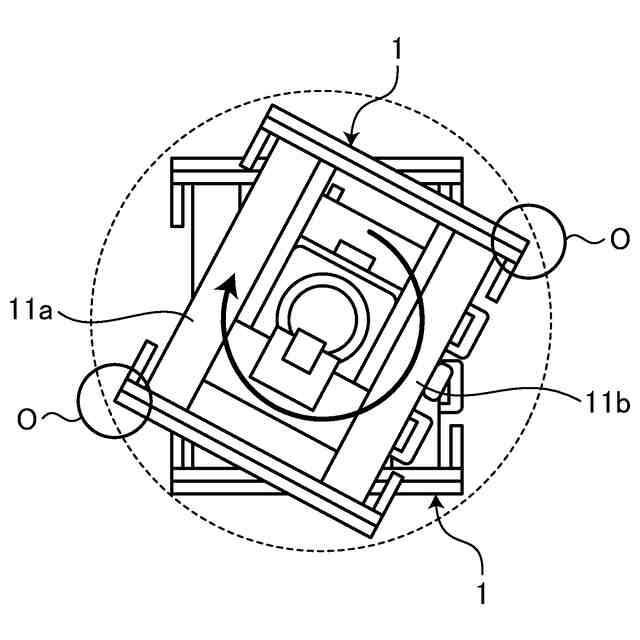
図3は、超信地旋回の右旋回の例を示す図である。
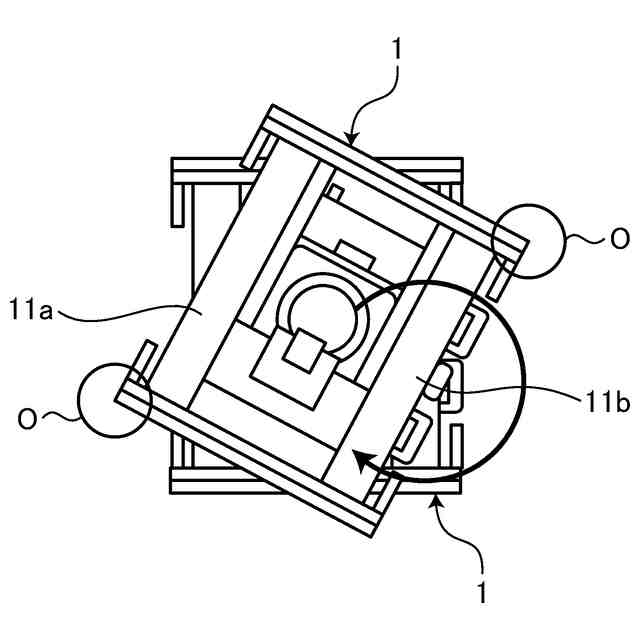
図4は、信地旋回の右旋回の例を示す図である。
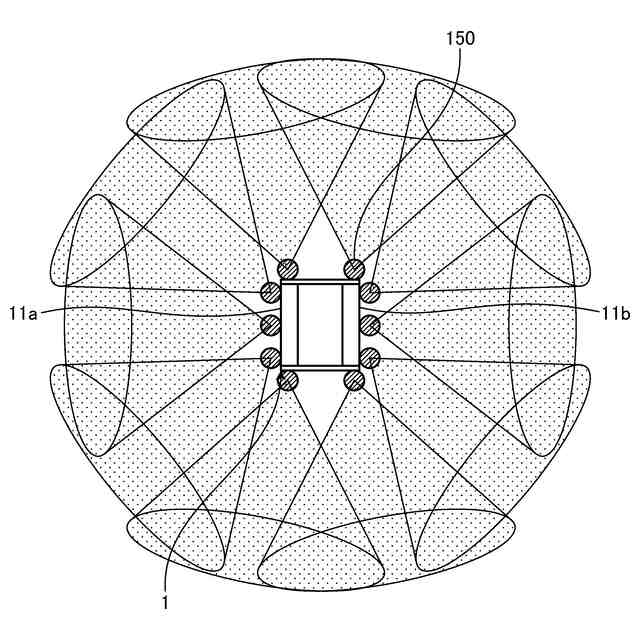
図5は、走行装置に超音波センサを複数設置して全方位カバーした例を示す図である。
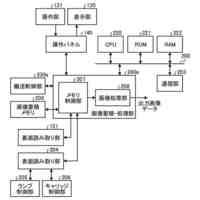
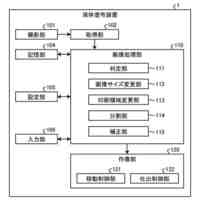
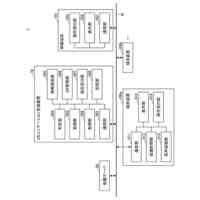
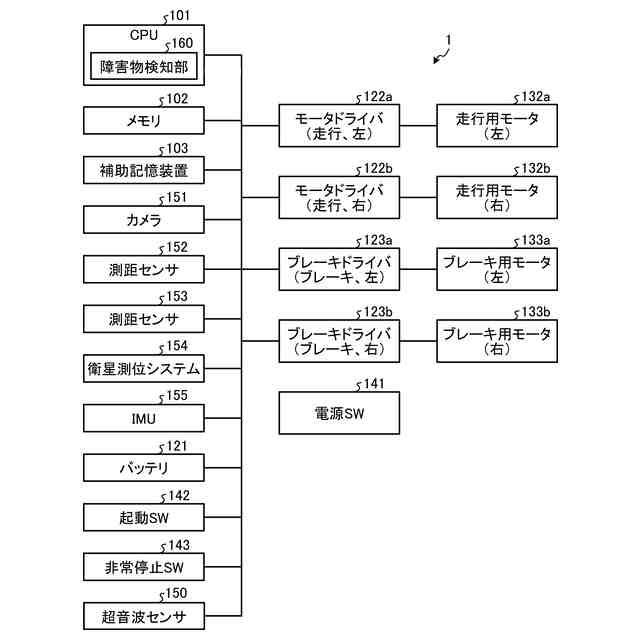
図6は、走行装置のハードウェア構成の一例を示すブロック図である。
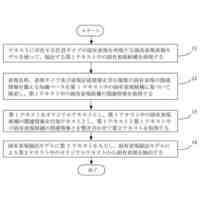
図7は、走行装置の障害物検知部による自律走行の際の超音波センサを用いた物体検知の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に添付図面を参照して、移動体および履帯式走行体の実施の形態を詳細に説明する。
【0010】
図1は、実施の形態にかかる走行装置1の構成の一例を示す外観斜視図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
10日前
株式会社リコー
定着装置及び画像形成装置
11日前
株式会社リコー
画像読取装置及び画像形成装置
10日前
株式会社リコー
シート搬送装置及び画像形成装置
10日前
株式会社リコー
画像処理装置、および画像処理方法
10日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
9日前
株式会社リコー
情報処理装置、開発支援システムおよびプログラム
10日前
株式会社リコー
固有表現抽出方法、固有表現抽出装置及びプログラム
2日前
株式会社リコー
情報提供システム、電子機器、情報提供方法、及びプログラム
3日前
株式会社リコー
伝送管理装置
2日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
9日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
9日前
株式会社リコー
ファクシミリ装置、情報処理システム、情報処理方法及びプログラム
10日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法、印刷媒体、及びプログラム
11日前
株式会社リコー
情報処理装置、印刷システム、印刷方法及びプログラム
8日前
株式会社リコー
情報処理装置、情報処理方法、プログラム、情報処理システム
9日前
株式会社リコー
データ管理システム、端末装置、プログラム、データ入力方法
9日前
株式会社リコー
コミュニケーション支援システム、コミュニケーション支援装置、コミュニケーション支援方法、及びプログラム
11日前
株式会社リコー
画像処理方法、プログラム、画像処理装置および画像処理システム
4日前
株式会社リコー
情報処理システム、情報処理装置、情報処理方法、プログラム、機器
2日前
個人
カート
12日前
個人
走行装置
26日前
個人
電動走行車両
26日前
個人
乗り物
2か月前
個人
発音装置
4か月前
個人
電動モビリティ
4か月前
個人
閂式ハンドル錠
26日前
個人
折り畳み自転車
7か月前
個人
自転車用傘捕捉具
8か月前
個人
体重掛けリフト台車
8か月前
個人
自由方向乗車自転車
4か月前
個人
キャンピングトライク
5か月前
個人
自転車用荷物台
8か月前
個人
アタッチメント
8か月前
個人
ステアリングの操向部材
6か月前
株式会社CPM
駐輪機
8か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ