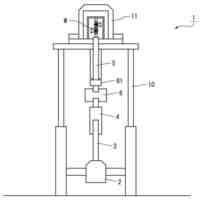
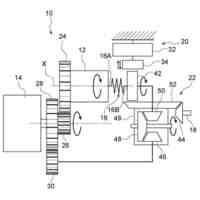
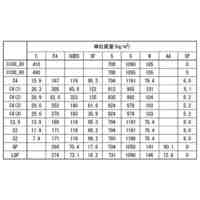
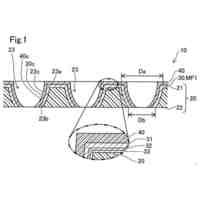
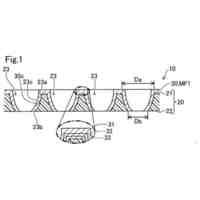
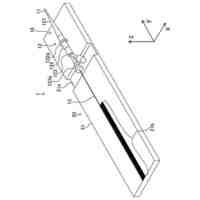
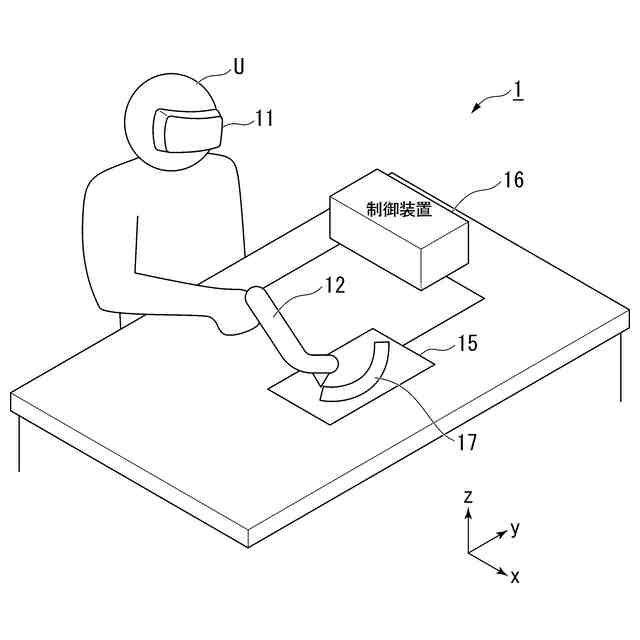
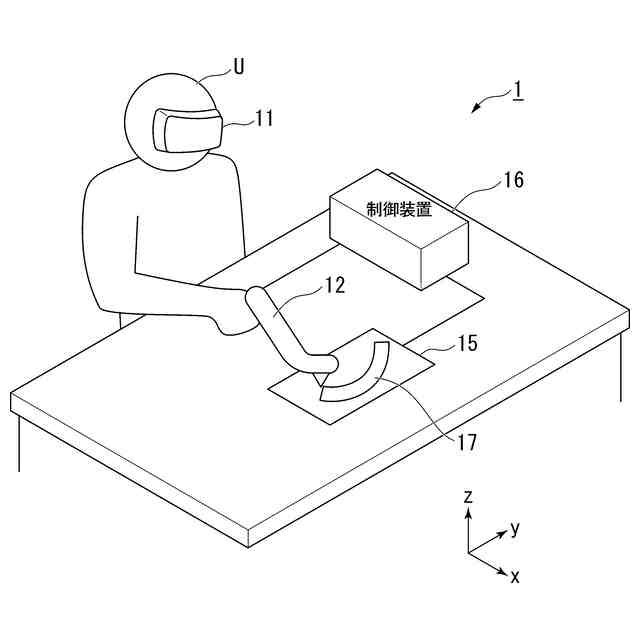
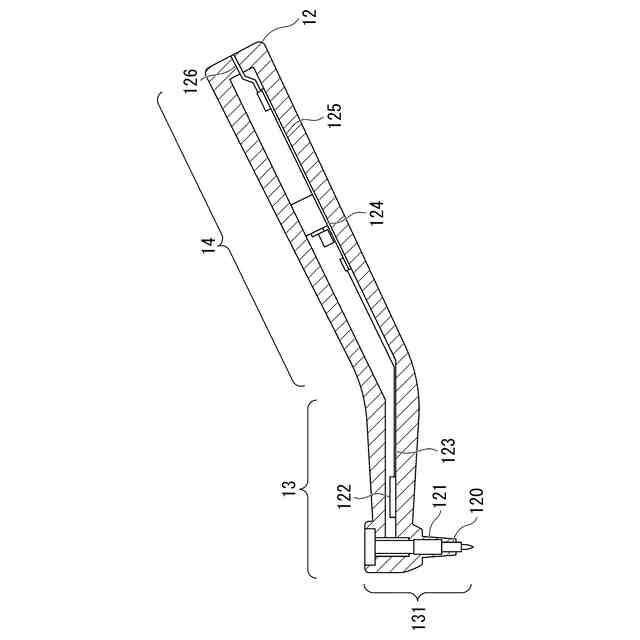
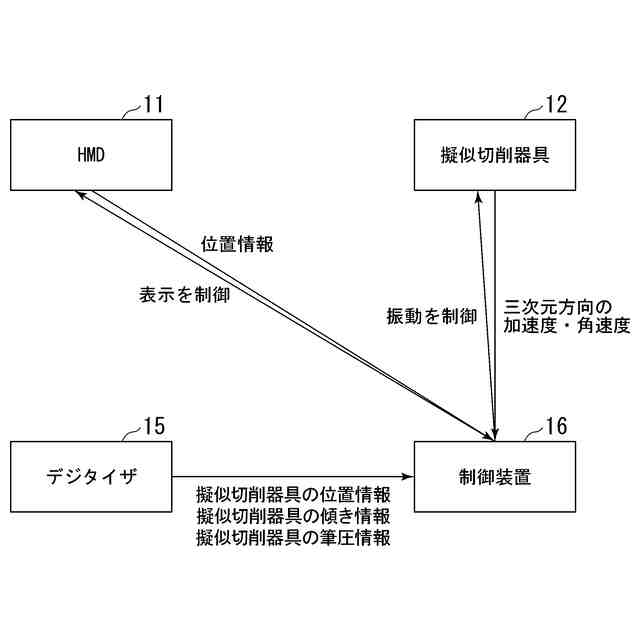
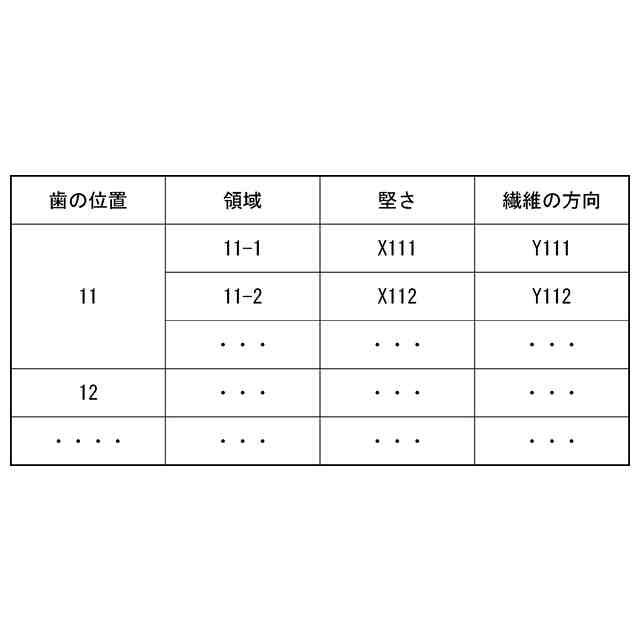
発明の詳細な説明【技術分野】 【0001】 本発明は、切削訓練補助システムに関する。 続きを表示(約 2,600 文字)【背景技術】 【0002】 歯科治療は繊細な患部が対象の治療であることから、その技術を習得するときには歯の切削を訓練することが重要である。そのため、歯の切削を訓練することを目的としたロボットやVR技術を用いたシミュレータが開発されている(例えば非特許文献1及び非特許文献2)。 【先行技術文献】 【非特許文献】 【0003】 Al‐Saud, Loulwa M., F. Mushtaq, M. J. Allsop, P. C. Culmer, I. Mirghani, E. Yates, A. Keeling, M. A. Mon-Williams and M. Manogue. "Feedback and motor skill acquisition using a haptic dental simulator."European Journal of Dental Education" 21.4 (2017): 240-247. Serrano, Carlos M., Paul R. Wesselink, and Johanna M. Vervoorn. "First experiences with patient‐centered training in virtual reality." Journal of dental education 84.5 (2020): 607-614. Kato, Kunihiro, Kaori Ikematsu, and Yoshihiro Kawahara. "CAPath: 3D-Printed Interfaces with Conductive Points in Grid Layout to Extend Capacitive Touch Inputs."Proceedings of the ACM on Human-Computer Interaction 4.ISS (2020): 1-17. 【発明の概要】 【発明が解決しようとする課題】 【0004】 しかしながら、歯の切削を訓練するためのロボットやシミュレータは高価であった。そのため、例えば歯学部の学生全員にロボット又はシミュレータを貸与することは難しかった。このような問題は歯の切削に限定された問題ではなく、様々な切削対象について共通した問題である。 本発明の目的は、より安価に切削対象の切削を訓練することができる切削訓練補助システムを提供することにある。 【課題を解決するための手段】 【0005】 本発明の一態様は、装着型ディスプレイ、擬似切削器具、位置検知装置、制御装置を備える切削訓練補助システムであって、前記擬似切削器具は、三次元方向の加速度及び角速度を測定する6軸センサと、振動する振動子と、を備え、前記位置検知装置は、前記擬似切削器具の位置及び前記位置検知装置に対する前記擬似切削器具の角度を検知し、前記制御装置は、前記位置検知装置の位置、前記位置検知装置に対する前記擬似切削器具の角度及び前記擬似切削器具の三次元方向の加速度及び角速度 とに基づいて前記振動子の振動を制御し、前記位置検知装置の位置、前記位置検知装置に対する前記擬似切削器具の角度及び前記擬似切削器具の三次元方向の加速度及び角速度とに基づいて前記装着型ディスプレイに切削器具を表示させる、切削訓練補助システムである。 【発明の効果】 【0006】 本発明によれば、より安価に切削対象の切削を訓練することができる。 【図面の簡単な説明】 【0007】 切削訓練補助システムの使用例を示す図である。 擬似切削器具の構成を示す図である。 切削訓練補助システムの構成要素間の関係を示した図である。 歯に関する情報の一例を示す表である。 【発明を実施するための形態】 【0008】 以下、図面を参照しながら本発明の実施形態について詳しく説明する。 〈全体の構成〉 図1は切削訓練補助システム1の使用例を示す図である。図1を用いて切削訓練補助システム1の概略について説明する。 切削訓練補助システム1は、使用者Uが切削訓練をすることを補助する。切削訓練補助システム1は、HMD(ヘッドマウントディスプレイ)11、擬似切削器具12、デジタイザ15、制御装置16及び物理プロップ17を備える。以下、説明のためにデジタイザ15がXY平面に位置し、Z軸に対して垂直であるとする。 【0009】 使用者Uは、HMD11を頭部に装着する。HMD11は使用者Uの目を覆う形で装着される。HMD11のディスプレイには、切削器具を使用して切削対象を切削している様子の映像が表示される。本実施形態における切削対象は例えば歯であるがこれに限られない。例えば、切削対象は骨や木材など切削対象となりうるものであればよい。HMD11は、スマートグラスなどの装着型ディスプレイであってもよい。 【0010】 使用者Uは、擬似切削器具12を使用することで切削を擬似的に行う。図2は、擬似切削器具12の構成を示す図である。擬似切削器具12は、例えば歯の切削器具を模した形状で構成される。擬似切削器具12は、ヘッド13、持ち手部分14が一体となった構造を有する。使用者Uは、持ち手部分を把持し、ヘッド13の位置指示部131に備えられる芯体120を物理プロップ17に接触させる。擬似切削器具12の位置指示部131の芯体120は、歯の切削器具において切削するための刃が備えられた部分に相当する。 切削器具は先端部を地面に対して垂直にしたときに持ち手部分は地面に対して垂直にはならず地面と鋭角をなす。擬似切削器具12も同様にして、位置指示部131を地面に対して垂直にしたときにヘッド13は地面に対して平行となる。また、ヘッド13を地面に対して水平にしたときに持ち手部分14は地面に対して水平にはならず地面と鋭角をなすような構造をとる。 (【0011】以降は省略されています) この特許をJ-PlatPatで参照する
 特許ウォッチ
特許ウォッチ