TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037742
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144866
出願日
2023-09-06
発明の名称
駆動装置
出願人
オムロン株式会社
,
国立大学法人東北大学
代理人
弁理士法人太陽国際特許事務所
主分類
F16H
33/02 20060101AFI20250311BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】駆動装置において、出力を短い間隔で間欠的に繰り返すことを可能にする。
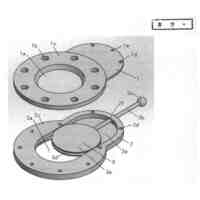
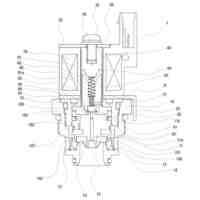
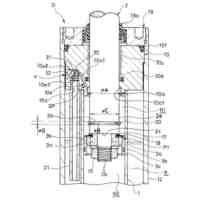
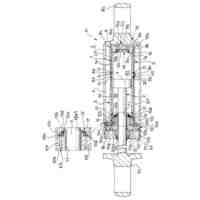
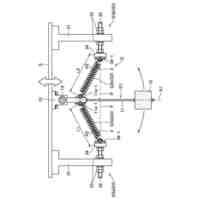
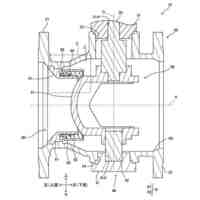
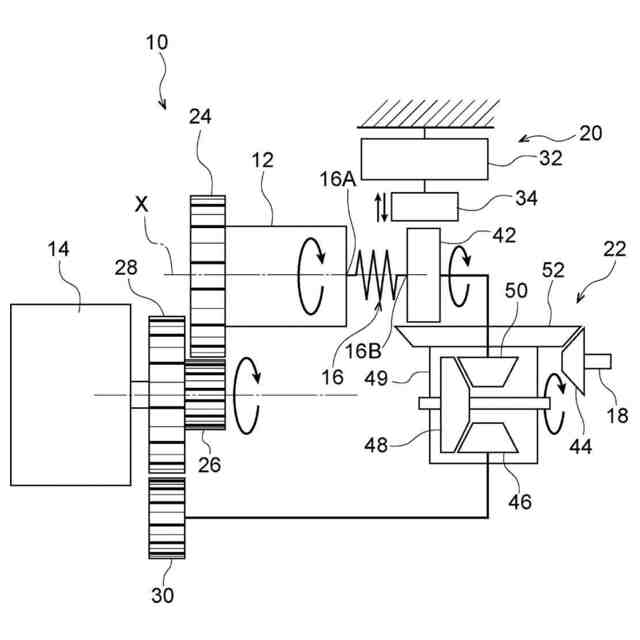
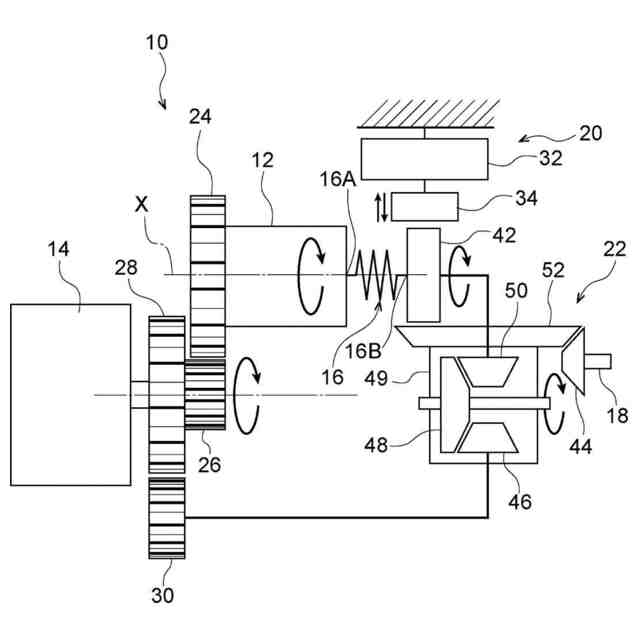
【解決手段】駆動装置は、中心軸X回りに回動可能とされた中央プーリ12(回転体)と、中央プーリ12を第1方向に回転させるモータ14と、一端16Aが中央プーリ12に取り付けられ、中央プーリ12の回転に伴い伸長してエネルギを蓄積し、エネルギ解放時に収縮して他端16Bが一端16Aに近づくように中心軸X回りに移動するぜんまいばね16(エネルギ蓄積部)と、ぜんまいばね16の移動に伴い回動する出力部18と、ぜんまいばね16の移動を制限するロック状態と、ぜんまいばね16の移動の制限を解除するロック解除状態とを切替可能なロック機構20と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
中心軸回りに回動可能とされた回転体と、
前記回転体を第1方向に回転させるアクチュエータと、
一端が前記回転体に取り付けられ、前記回転体の回転に伴い伸長してエネルギを蓄積し、エネルギ解放時に収縮して他端が前記一端に近づくように前記中心軸回りに移動するエネルギ蓄積部と、
前記エネルギ蓄積部の移動に伴い回動する出力部と、
前記エネルギ蓄積部の移動を制限するロック状態と、前記エネルギ蓄積部の移動の制限を解除するロック解除状態とを切替可能なロック機構と、
を有する駆動装置。
続きを表示(約 350 文字)
【請求項2】
前記エネルギ蓄積部は、定荷重ばねである請求項1に記載の駆動装置。
【請求項3】
前記エネルギ蓄積部は、前記アクチュエータからの入力とは別に、前記エネルギ蓄積部を伸長させるように入力された外力もエネルギとして蓄積する請求項1に記載の駆動装置。
【請求項4】
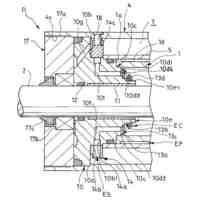
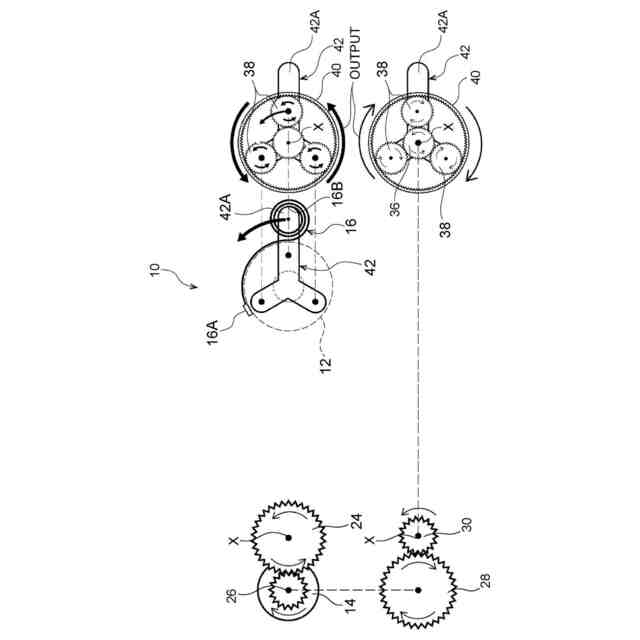
太陽歯車と、前記太陽歯車と噛み合い自転しながら前記太陽歯車の回りを公転する遊星歯車と、前記遊星歯車と噛み合う内歯車とを備えた遊星歯車機構を更に有し、
前記アクチュエータは、前記回転体に加えて前記太陽歯車を回転させ、
前記エネルギ蓄積部の前記他端は、前記遊星歯車を支持するキャリアに取り付けられ、
前記出力部は、前記内歯車の回転トルクを出力する請求項3に記載の駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ロック手段によりアームの固定を行った状態でアクチュエータにより引張りコイルばねを引き伸ばしてエネルギを蓄積し、ロック手段によるアームの固定の解放を行うことでばねのエネルギを開放し、アームの回動力とするアーム機構が開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-255969号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
脚型の移動ロボットにおいて、単に平地での歩行だけでなく、ジャンプや走行などのダイナミックな動作も行うことができると、段差の乗り越え等が可能となり、実行可能なタスクの幅が広がる。高い跳躍や俊敏な走行、またダイナミックな運動を高頻度で行う脚型ロボットを動かすための関節の駆動装置には、短い間隔で高速かつ大きなトルクを出力できる性能が求められる。加えて、高加速度を実現するためには、駆動装置の質量を低減することが望ましい。
【0005】
質量低減のため、出力仕事率が低い小型のアクチュエータを用いて大きな出力を得ようとする場合、高減速比、高トルクで長い時間をかけてばねにエネルギを蓄積する場合、アクチュエータから取り出せるエネルギは大きくなる。しかしながら、そのような構造は、エネルギ蓄積に長い時間を要するため、一度きりの垂直飛びのような運動には向いている一方で、連続して跳躍動作を行うような動作には向いていない。
【0006】
上記した従来例では、アームを再度同じように回動させるためには、回動したアームを初期位置に戻す必要があり、短い間隔での作動は難しいと考えられる。
【0007】
本発明は、駆動装置において、出力を短い間隔で間欠的に繰り返すことを可能にすることを目的とする。
【課題を解決するための手段】
【0008】
この駆動装置では、アクチュエータにより回転体を常時回転させる。この回転体にはエネルギ蓄積部の一端が取り付けられており、ロック機構によりエネルギ蓄積部の移動を制限したロック状態で回転体を回転させると、エネルギ蓄積部が伸長してエネルギを蓄積する。エネルギが蓄積された状態で、ロック機構をロック解除状態にし、エネルギ蓄積部の移動の制限を解除すると、エネルギ蓄積部が収縮し、エネルギ蓄積部の他端が一端に近づくように中心軸回りに移動する。このとき、エネルギ蓄積部に蓄積されていたエネルギが解放される。このエネルギは、エネルギ蓄積部の移動により回動する出力部から出力される。なお、エネルギ蓄積部の一端が取り付けられた回転体は、アクチュエータによりを常時回転しているので、エネルギ解放時にエネルギ蓄積部の一端が他端に近づくよう回転体が逆回転することは抑制される。
【0009】
回転体は常時回転しているので、エネルギ解放後にエネルギ蓄積部をロック状態にすることでエネルギの蓄積が直ちに開始される。つまり、次のエネルギ蓄積のために回転体を初期位置に戻す必要がない。したがって、出力を短い間隔で間欠的に繰り返すことができる。
【0010】
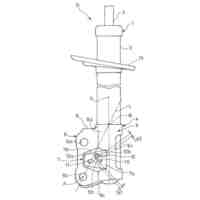
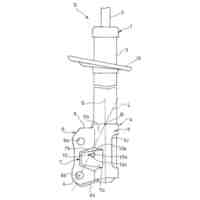
出力部の出力を利用して例えばロボットの脚部を動かすことにより、ジャンプや走行などのダイナミックな動作を高頻度で行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オムロン株式会社
変換装置、変換方法、および、変換プログラム
19日前
オムロン株式会社
施設情報提示システム、施設情報提示方法、及び施設情報提示プログラム
7日前
オムロン株式会社
情報処理装置、管理プログラム、および管理方法
8日前
個人
留め具
1か月前
個人
鍋虫ねじ
3か月前
個人
紛体用仕切弁
3か月前
個人
回転伝達機構
3か月前
個人
差動歯車用歯形
5か月前
個人
給排気装置
1か月前
個人
ジョイント
2か月前
個人
ナット
21日前
個人
ナット
2か月前
株式会社不二工機
電磁弁
4か月前
個人
地震の揺れ回避装置
4か月前
個人
ゲート弁バルブ
6日前
個人
吐出量監視装置
2か月前
柿沼金属精機株式会社
分岐管
3か月前
カヤバ株式会社
緩衝器
1か月前
兼工業株式会社
バルブ
22日前
カヤバ株式会社
ダンパ
5か月前
カヤバ株式会社
緩衝器
4か月前
カヤバ株式会社
緩衝器
4か月前
カヤバ株式会社
ダンパ
5か月前
株式会社奥村組
制振機構
1か月前
株式会社三五
ドライブシャフト
1か月前
株式会社ニフコ
クリップ
6日前
アズビル株式会社
回転弁
2か月前
株式会社ノーリツ
分配弁
1か月前
株式会社ニフコ
クリップ
1か月前
株式会社不二工機
電動弁
1か月前
株式会社タカギ
水栓装置
3か月前
株式会社不二工機
電磁弁
3か月前
株式会社奥村組
制振機構
1か月前
株式会社オンダ製作所
識別リング
3か月前
井関農機株式会社
作業車両
4か月前
個人
誘導電流活用式差動制限装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ