TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152576
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023201553
出願日
2023-11-29
発明の名称
非接触給電システム、送電装置、および受電装置
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
H02J
50/40 20160101AFI20241018BHJP(電力の発電,変換,配電)
要約
【課題】非接触給電において、限られた送電路上で十分な充電量を確保する技術を提供する。
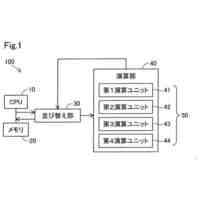
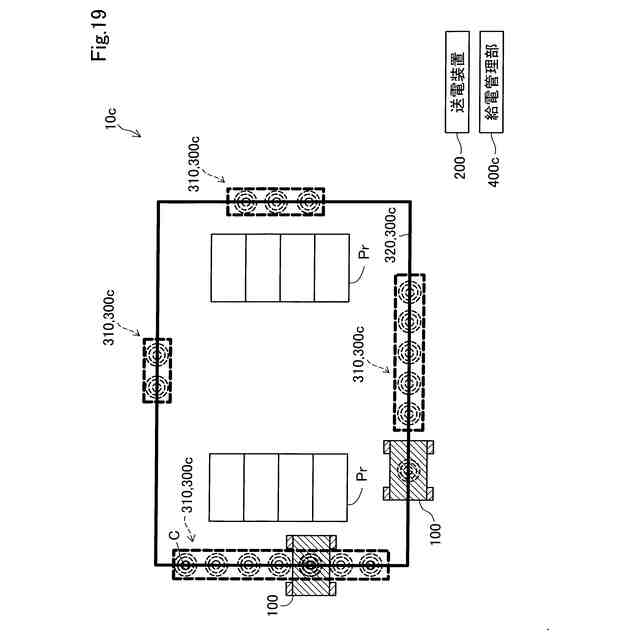
【解決手段】非接触給電システム10cは、送電装置200と、送電路310と非送電路320とより構成される複数の走行路300cと、給電管理部400cと、を備える。移動体100は、走行路を走行し、受電部とバッテリとバッテリセンサと第1制御装置とを備える。給電管理部は、給電情報を生成する第1制御部を備える。給電情報は、移動体の送電路における走行と受電を制御するための給電情報であって、非送電路を第2走行速度で走行する移動体が、進路において走行すべき第1走行速度を含む。第1制御部は、第1走行速度として進路の移動体が充電するための第3走行速度を算出し、移動体に第3走行速度を送信する。
【選択図】図19
特許請求の範囲
【請求項1】
移動体(100、100a、100b)に非接触で給電する非接触給電システム(10、10a、10b、10c、10d、10e)であって、
前記移動体に、前記給電のための電力の送電を行う送電装置(200)と、
前記送電装置による送電が行われる1以上の送電路(310)と、前記1以上の送電路以外の1以上の非送電路(320)と、より構成される複数の走行路(300、300c)と、
前記非接触給電システムを制御する給電管理部(400、400a、400b、400c)と、を備え、
前記移動体は、前記複数の走行路のいずれかを走行し、
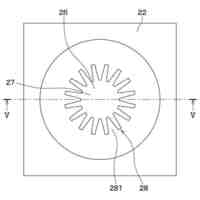
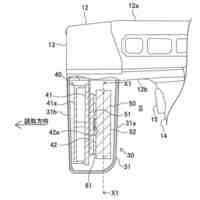
前記送電装置から前記電力を受電する受電部(110)と、
前記電力としての予め定められた供給電力(P)で充電されることができるバッテリ(120)と、
前記バッテリの残量(Wb)を取得するバッテリセンサ(130)と、
前記給電管理部と通信する第1通信部(140)と、
前記移動体を制御する第1制御装置(150)と、を備え、
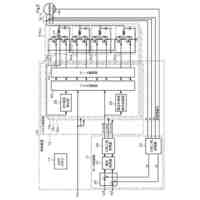
前記送電装置は、
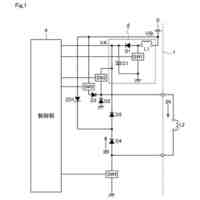
前記1以上の送電路に設けられた1以上の送電コイル(220)と、
前記送電コイルを介して、前記供給電力(P)を、前記1以上の送電路上を走行している前記移動体に出力する電源(210)と、を備え、
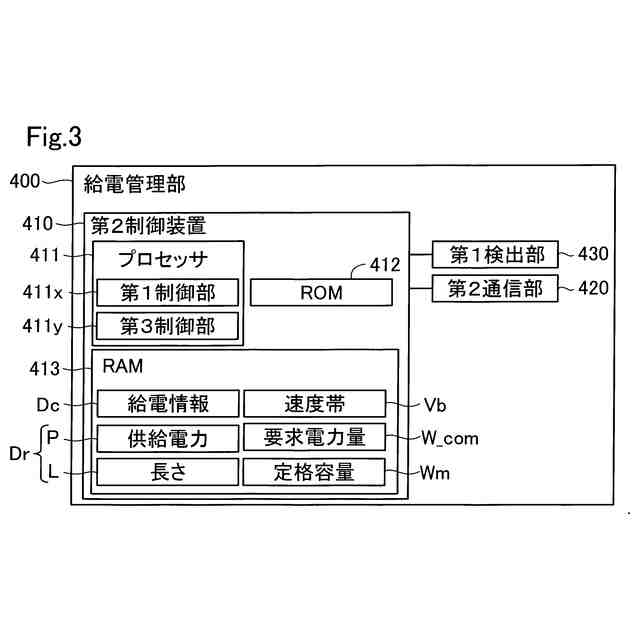
前記給電管理部は、
給電情報(Dc)を生成する第1制御部(411x,411xc)と、
前記第1通信部と通信する第2通信部(420)と、を備え、
前記移動体または前記給電管理部は、前記残量に基づいて、前記バッテリの要求電力量(Ws)を算出する第3制御部(411y)を備え、
前記給電情報は、前記第1制御装置による前記移動体の前記1以上の送電路における走行と前記受電を制御するための前記給電情報であって、少なくとも、前記1以上の送電路のそれぞれの送電路、または、前記1以上の非送電路および前記1以上の送電路を組み合わせた経路、として予め定められた進路における第1走行速度(V1)であって、前記1以上の非送電路のそれぞれの非送電路を予め定められた第2走行速度(V2)で走行する前記移動体が、前記進路において走行すべき第1走行速度を含み、
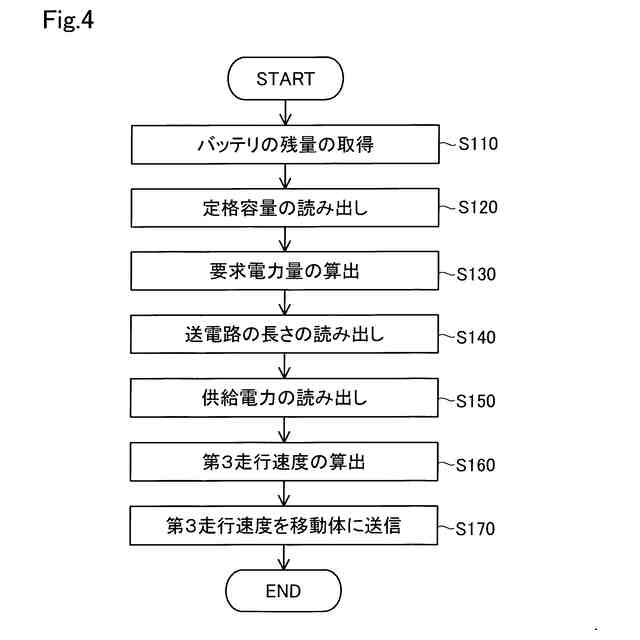
前記第1制御部は、
前記第1走行速度として前記進路の前記移動体が前記要求電力量を充電するための第3走行速度であって、前記1以上の送電路の電力供給能力に関して予め定められた1以上の受電情報と前記要求電力量とに基づいて第3走行速度(V_com)を算出し、
前記第2通信部により、前記移動体に前記第3走行速度を送信する、非接触給電システム。
続きを表示(約 2,000 文字)
【請求項2】
請求項1記載の非接触給電システムであって、
前記第1制御部は、前記1以上の受電情報を、前記進路における前記1以上の送電路の前記電力供給能力に基づいて決定する、非接触給電システム。
【請求項3】
請求項1記載の非接触給電システムであって、
前記移動体は、さらに、前記受電による充電電力量を取得する電力センサを備え、
前記受電情報は、前記第3走行速度を算出する前の前記進路に係わる前記電力供給能力についての前記移動体の受電記録であって、前記充電電力量に係わる情報を含む、非接触給電システム。
【請求項4】
請求項1記載の非接触給電システムであって、
前記移動体は、さらに、前記受電による充電電力量を取得する電力センサを備え、
前記第1制御部は、
前記進路における最初の制御において、前記1以上の受電情報を、前記進路における前記1以上の送電路の電力供給能力に基づいて決定し、
前記最初の制御より後の制御において、前記1以上の受電情報を、過去の制御において取得された前記進路における前記1以上の送電路に係わる前記電力供給能力についての前記移動体の受電記録であって、前記充電電力量に係わる情報を含む受電記録に決定する、非接触給電システム。
【請求項5】
請求項1に記載の非接触給電システムであって、
前記第3制御部は、さらに、前記バッテリに定格容量に基づく第1基準容量(C1)と、の差分に基づいて、前記要求電力量の算出を行う、非接触給電システム。
【請求項6】
請求項1に記載の非接触給電システムであって、
前記第3制御部は、
前記移動体の予め定められた動作期間(Ta)において、前記バッテリの定格容量(Wm)より小さい第2基準容量(C2)を前記動作期間の終期(Tf)における前記残量の下限とした場合の、前記移動体の走行時間(Td)と前記残量の予め定められた関係と、に基づいて、前記要求電力量の算出を行う、非接触給電システム。
【請求項7】
請求項1から6のいずれか1項に記載の非接触給電システムであって、
前記移動体または前記給電管理部は、さらに、前記送電路からの前記移動体の離脱を検出する第1検出部(430c)を備え、
前記第1制御部は、前記離脱の検出を条件に、前記進路における前記1以上の送電路のそれぞれの送電路ごとに、前記第3走行速度の算出を制御する、非接触給電システム。
【請求項8】
請求項1から6のいずれか1項に記載の非接触給電システムであって、
前記移動体または前記給電管理部は、さらに、前記送電路からの前記移動体の離脱を検出する第1検出部を備え、
前記第1制御部は、前記離脱の検出の回数に基づいて、前記進路における複数の前記送電路のうち、2以上の予め定められた送電路ごとに、前記第3走行速度の算出を制御する、非接触給電システム。
【請求項9】
請求項1から6のいずれか1項に記載の非接触給電システムであって、
前記移動体は、前記進路において、第4走行速度以上の前記第3走行速度で走行し、
前記第1制御部は、
前記移動体が前記進路を前記第4走行速度で走行した場合に、少なくとも2つの前記送電路を走行できる周期で、前記第3走行速度の算出を制御し、
前記給電管理部は、さらに、前記第4走行速度と、前記送電路の長さと、前記非送電路の長さと、前記供給電力と、を備え、
前記第4走行速度と、前記送電路の長さと、前記非送電路の長さと、に基づいて、前記1以上の送電路のうち、前記周期で通過できる送電路についての前記送電路の長さと前記供給電力を、前記1以上の受電情報に決定する、非接触給電システム。
【請求項10】
請求項1記載の非接触給電システムであって、さらに、
複数の前記移動体の稼働を管理し、複数の前記移動体に供給できる電力を確認する工程管理部(500)を備え、
前記工程管理部は、
前記給電管理部と通信する第6通信部(550)と、
前記工程管理部を制御する第3制御装置(510)と、を備え、
前記給電管理部は、さらに、
前記工程管理部と通信する第4通信部(440)を備え、
前記第3制御装置は、
複数の前記受電情報を備え、
前記移動体の稼働状況に応じて、前記第1制御部に前記1以上の受電情報のうち1つの受電情報を決定する指令を行い、
前記第1制御部は、前記1つの受電情報に基づいて、前記第3走行速度の算出する、非接触給電システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、非接触給電システム、送電装置、および受電装置に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
非接触で給電される車両において、例えば、特許文献1のように、走行経路の一部に給電路を設置することで、走行中に給電を行う技術がある。受電装置を備えた車両は、送電装置を備えた送電路上を走行する際に、送電装置から給電される。
【先行技術文献】
【特許文献】
【0003】
特開2021-45013
【発明の概要】
【発明が解決しようとする課題】
【0004】
送電路による非接触式の給電方式において、送電路の長さは、有限であるため、車両が送電路上を走行する時間にも限りがある。よって、車両が必要とする充電量を送電路上の走行中に確保できない場合がある。こうした場合、例えば、工場で使用されるAGVは、停車した状態で給電を行うため、その間、作業を行えない。すなわち、AGVの稼働率が低下する。よって、AGVの稼働時間を長くさせるため、大容量のバッテリを搭載させる対策が必要となる。
【0005】
したがって、非接触式の給電方式により、限られた送電路上で十分な充電量を確保する技術が求められていた。この技術により、充電時間による車両の稼働率の低下の防止や、バッテリの大容量化を不要とすることが望まれていた。
【課題を解決するための手段】
【0006】
本開示は、以下の形態として実現することが可能である。
【0007】
本開示の第1形態によれば、移動体(100、100a、100b)に非接触で給電する非接触給電システム(10、10a、10b、10c、10d、10e)が提供される。この非接触給電システムは、前記移動体に、前記給電のための電力の送電を行う送電装置(200)と、前記送電装置による送電が行われる1以上の送電路(310)と、前記1以上の送電路以外の1以上の非送電路(320)と、より構成される複数の走行路(300,300c)と、前記非接触給電システムを制御する給電管理部(400、400a、400b、400c)と、を備え、前記移動体は、前記複数の走行路のいずれかを走行し、前記送電装置から前記電力を受電する受電部(110)と、前記電力としての予め定められた供給電力(P)で充電されることができるバッテリ(120)と、前記バッテリの残量(Wb)を取得するバッテリセンサ(130)と、前記給電管理部と通信する第1通信部(140)と、前記移動体を制御する第1制御装置(150)と、を備え、前記送電装置は、前記1以上の送電路に設けられた1以上の送電コイル(220)と、前記送電コイルを介して、前記供給電力(P)を、前記1以上の送電路上を走行している前記移動体に出力する電源(210)と、を備え、前記給電管理部は、給電情報(Dc)を生成する第1制御部(411x、411xc)と、前記第1通信部と通信する第2通信部(420)と、を備え、前記移動体または前記給電管理部は、前記残量に基づいて、前記バッテリの要求電力量(Ws)を算出する第3制御部(411y)を備え、前記給電情報は、前記第1制御装置による前記移動体の前記1以上の送電路における走行と前記受電を制御するための前記給電情報であって、少なくとも、前記1以上の送電路のそれぞれの送電路、または、前記1以上の非送電路および前記1以上の送電路を組み合わせた経路、として予め定められた進路における第1走行速度(V1)であって、前記1以上の非送電路のそれぞれの非送電路を予め定められた第2走行速度(V2)で走行する前記移動体が、前記進路において走行すべき第1走行速度を含み、前記第1制御部は、前記第1走行速度として前記進路の前記移動体が前記要求電力量を充電するための第3走行速度であって、前記1以上の送電路の電力供給能力に関して予め定められた1以上の受電情報と前記要求電力量とに基づいて第3走行速度(V_com)を算出し、前記第2通信部により、前記移動体に前記第3走行速度を送信する。
【0008】
このような態様とすることで、移動体は、バッテリの要求電力量と受電情報との変化に応じた第3走行速度V_comにより、進路を走行する。例えば、受電情報は、送電路の供給電力と長さである。このため、移動体に受電される電力は、走行速度に依存する。このため、移動体は、給電管理部から送信された第3走行速度で走行することにより、バッテリの残量の変化に応じた要求電力量を充電する。よって、非接触給電システムは、残量の不足による移動体の停止を防止することにより、移動体の稼働率の低下を防止できる。
【0009】
本開示の第2形態によれば、移動体に非接触で給電する非接触給電システムのための送電装置が提供される。この送電装置は、前記移動体に、前記給電のための電力の送電を行う前記送電装置と、前記送電装置による送電が行われる1以上の送電路と、前記1以上の送電路以外の1以上の非送電路と、より構成される複数の走行路と、
前記非接触給電システムを制御する給電管理部と、を備え、前記移動体は、前記複数の走行路のいずれかを走行し、前記送電装置から前記電力を受電する受電部と、前記電力としての予め定められた供給電力で充電されることができるバッテリと、電力量としての前記バッテリの残量を取得するバッテリセンサと、前記給電管理部と通信する第1通信部と、前記移動体を制御する第1制御装置と、を備え、前記送電装置は、前記1以上の送電路に設けられた1以上の送電コイルと、前記送電コイルを介して、前記供給電力を、前記1以上の送電路上を走行している前記移動体に出力する電源と、を備え、前記給電管理部は、前記移動体の走行に必要な給電情報を生成する第1制御部と、前記第1通信部と通信する第2通信部と、を備え、前記移動体または前記給電管理部は、前記残量に基づいて、前記バッテリの要求電力量を算出する第3制御部を備え、前記給電情報は、前記第1制御装置による前記移動体の前記1以上の送電路における走行と前記受電を制御するための前記給電情報であって、少なくとも、前記1以上の送電路のそれぞれの送電路、または、前記1以上の非送電路および前記1以上の送電路を組み合わせた経路、として予め定められた進路における第1走行速度であって、前記1以上の非送電路のそれぞれの非送電路を予め定められた第2走行速度で走行する前記移動体が、前記進路において走行すべき第1走行速度を含み、前記第1制御部は、前記第1走行速度として前記進路の前記移動体が前記要求電力量を充電するための第3走行速度であって、前記1以上の送電路の電力供給能力に関して予め定められた1以上の受電情報と前記要求電力量とに基づいて第3走行速度を算出し、前記第2通信部により、前記移動体に前記第3走行速度を送信する。
【0010】
このような態様とすることで、移動体は、バッテリの要求電力量と受電情報との変化に応じた第3走行速度により、進路を走行する。例えば、受電情報は、送電路の供給電力と長さである。このため、移動体に受電される電力は、走行速度に依存する。このため、移動体は、給電管理部から送信された第3走行速度で走行することにより、バッテリの残量の変化に応じた要求電力量を充電する。よって、送電装置は、残量の不足による移動体の停止を防止することにより、移動体の稼働率の低下を防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
29日前
株式会社デンソー
駆動装置
18日前
株式会社デンソー
電気機器
4日前
株式会社デンソートリム
電子装置
26日前
株式会社デンソー
表示装置
11日前
株式会社デンソー
管理装置
18日前
株式会社デンソー
表示装置
18日前
株式会社デンソー
送風装置
13日前
株式会社デンソー
通信装置
18日前
株式会社デンソー
圧電素子
4日前
株式会社デンソーテン
表示装置
14日前
株式会社デンソー
測距装置
4日前
株式会社デンソー
切断装置
20日前
株式会社デンソー
真空装置
14日前
株式会社デンソー
ステータ
今日
株式会社デンソー
演算装置
今日
株式会社デンソー
ガスケット
6日前
株式会社デンソー
レーダ装置
22日前
株式会社デンソー
音低減装置
11日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
電力変換器
12日前
株式会社デンソー
蓄放熱材料
6日前
株式会社デンソー
レーダ装置
18日前
株式会社デンソー
電力変換器
今日
株式会社デンソー
半導体装置
29日前
株式会社デンソー
電力変換器
今日
株式会社デンソー
半導体装置
11日前
株式会社デンソー
電力変換器
12日前
株式会社デンソーウェーブ
無線通信端末
26日前
株式会社デンソー
表示制御装置
22日前
株式会社デンソー
運転支援装置
11日前
株式会社デンソー
リニアモータ
14日前
株式会社デンソー
電子制御装置
20日前
株式会社デンソー
流路形成装置
11日前
株式会社デンソー
流路形成装置
11日前
株式会社デンソー
電子制御装置
20日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ