TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024151827
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023065559
出願日
2023-04-13
発明の名称
測距装置
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
G01S
7/4865 20200101AFI20241018BHJP(測定;試験)
要約
【課題】多重反射やクラッタの影響による測距精度の低下を抑制する。
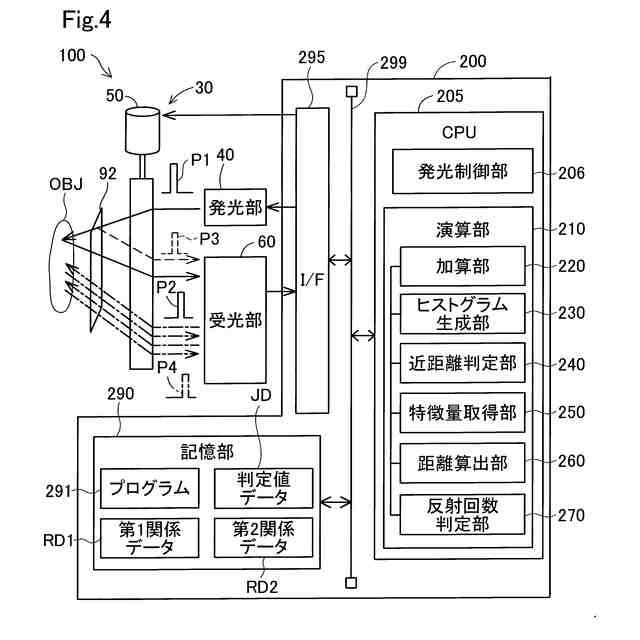
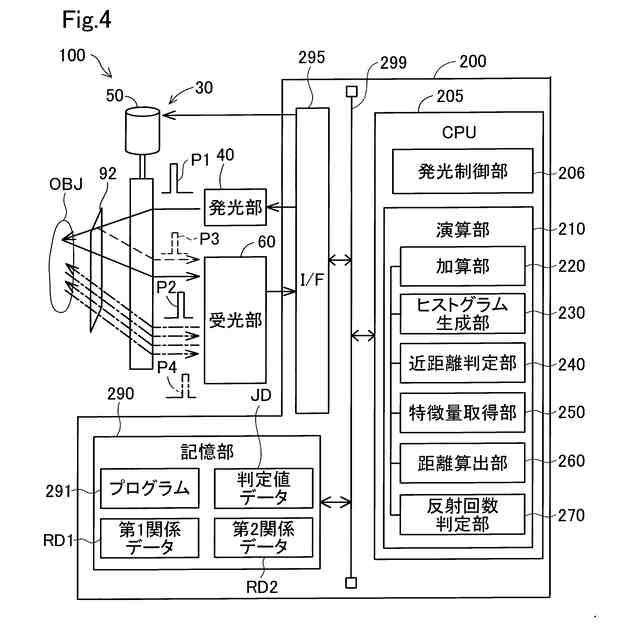
【解決手段】測距装置100は、パルス光を射出する発光部40と、対象物によるパルス光の反射光を受光し出力信号Soutを出力する受光部60と、パルス光の飛行時間を利用して対象物距離を演算する演算部210とを備える。演算部は、出力信号に基づいて、反射光の受光強度を飛行時間ごとに表したヒストグラムHGを生成するヒストグラム生成部230と、ヒストグラムにおけるピークPKの立ち上がりタイミングRTに基づいて、対象物が距離範囲にあるか否かを判定する近距離判定部240と、ヒストグラムに基づいて反射回数に関する特徴量を取得する特徴量取得部250と、対象物が近距離範囲にある場合、特徴量とピークの立ち下がりタイミングFTとに基づいて対象物距離を算出する距離算出部とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
測距装置(100,100b)であって、
パルス光を射出する発光部(40)と、
対象物によって反射される前記パルス光の反射光を受光し、前記反射光に基づく出力信号(Sout)を出力する受光部(60)と、
前記パルス光の飛行時間を利用して、前記対象物までの距離である対象物距離を演算する演算部(210)と、を備え、
前記演算部は、
前記出力信号に基づいて、前記受光部による前記反射光の受光強度を飛行時間ごとに表したヒストグラム(HG)を生成するヒストグラム生成部(230)と、
前記ヒストグラムにおける前記受光強度のピーク(PK)の立ち上がりタイミング(RT)に基づいて、前記対象物が予め定められた近距離範囲にあるか否かを判定する近距離判定部(240)と、
前記ヒストグラムに基づいて、前記パルス光が前記対象物と前記受光部との間を反射によって往復した回数を表す反射回数に関する特徴量を取得する特徴量取得部(250)と、
前記対象物が前記近距離範囲にある場合、前記特徴量と、前記ピークの立ち下がりタイミング(FT)と、に基づいて前記対象物距離を算出する距離算出部(260,260b)と、を有する、
測距装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の測距装置であって、
前記距離算出部は、前記対象物が前記近距離範囲にない場合、前記立ち上がりタイミングに基づいて前記対象物距離を算出する、測距装置。
【請求項3】
請求項2に記載の測距装置であって、
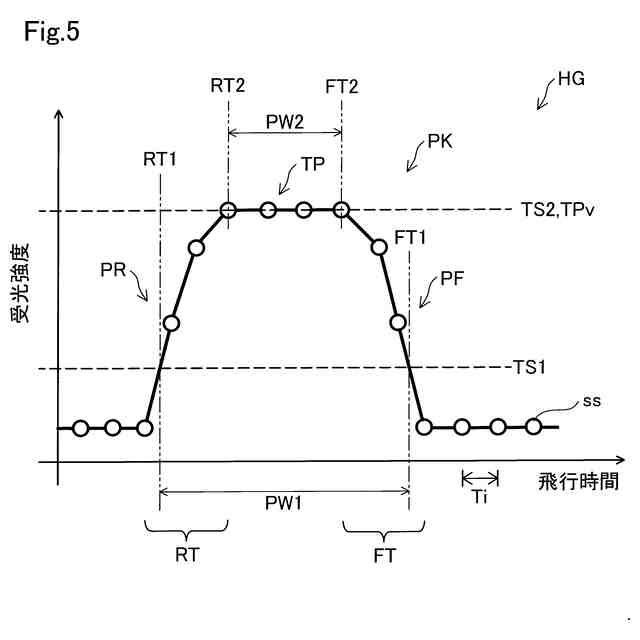
前記立ち上がりタイミングは、前記受光強度が第1閾値(TS1)を取る第1立ち上がりタイミング(RT1)と、前記受光強度が前記第1閾値よりも大きい第2閾値(TS2)を取る第2立ち上がりタイミング(RT2)と、を含み、
前記近距離判定部は、前記第2立ち上がりタイミングに基づいて、前記対象物が前記近距離範囲にあるか否かを判定し、
前記距離算出部は、前記対象物が前記近距離範囲にない場合、前記第1立ち上がりタイミングに基づいて前記対象物距離を算出する、測距装置。
【請求項4】
請求項3に記載の測距装置であって、
前記演算部は、前記特徴量に基づいて前記反射回数を判定する反射回数判定部(270)を更に有し、
前記距離算出部は、前記対象物が前記近距離範囲にある場合、判定された前記反射回数と、前記立ち下がりタイミングと、に基づいて前記対象物距離を算出する、測距装置。
【請求項5】
請求項4に記載の測距装置であって、
前記立ち下がりタイミングは、前記受光強度が前記第1閾値を取る第1立ち下がりタイミング(FT1)と、前記受光強度が前記第2閾値を取る第2立ち下がりタイミング(FT2)と、を含み、
前記反射回数判定部は、前記第1立ち上がりタイミングと前記第1立ち下がりタイミングとの間の時間幅を表す第1時間幅(PW1)と、前記第2立ち上がりタイミングと前記第2立ち下がりタイミングとの間の時間幅を表す第2時間幅(PW2)とのいずれかを前記特徴量として用いて、前記反射回数を判定する、測距装置。
【請求項6】
請求項5に記載の測距装置であって、
前記反射回数判定部は、
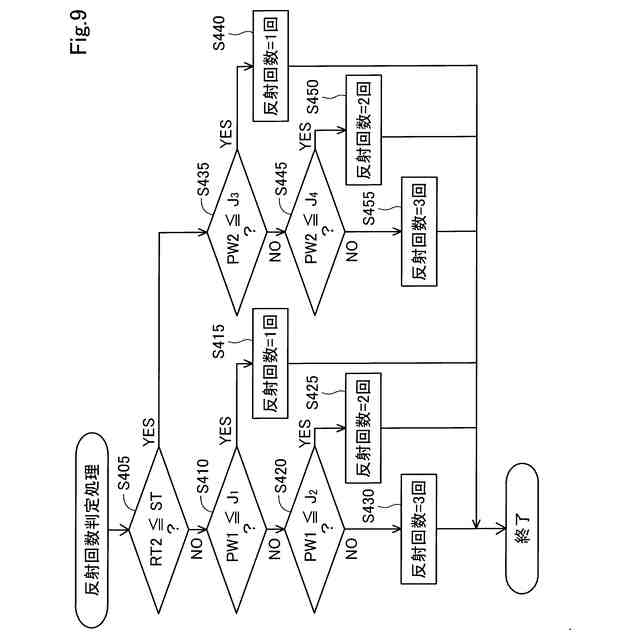
前記対象物が前記近距離範囲にある場合、前記第2立ち上がりタイミングが予め定められた基準タイミング(ST)以前か否かを判定し、
前記第2立ち上がりタイミングが前記基準タイミングよりも後である場合、前記第2立ち上がりタイミングと前記第1時間幅との対応関係に基づいて前記反射回数を判定し、
前記第2立ち上がりタイミングが前記基準タイミング以前である場合、前記第2立ち上がりタイミングと前記第2時間幅との対応関係に基づいて前記反射回数を判定し、
前記距離算出部は、判定された前記反射回数と、前記第1立ち下がりタイミングと、に基づいて前記対象物距離を算出する、測距装置。
【請求項7】
請求項1から6のいずれか一項に記載の測距装置であって、
前記距離算出部は、前記受光強度に基づいて前記対象物距離を補正する、測距装置。
【請求項8】
請求項7に記載の測距装置であって、
前記距離算出部は、前記対象物距離の算出に前記立ち上がりタイミングを用いる場合と前記立ち下がりタイミングを用いる場合とで、前記対象物距離の補正の強度を異ならせる、測距装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測距装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
パルス光を発光部から射出して、対象物からの反射光を受光部で検出し、照射から受光までの光の飛行時間(TOF:Time Of Flight)を計測することで、対象物までの距離を測定する測距装置が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2001-74827号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
測距装置では、多重反射による信号やクラッタといった、対象物を測距するための所望信号とは異なる信号が生じる場合がある。ここでいうクラッタとは、発光部および受光部を収容する筐体の窓によって反射されたパルス光を指す。また、多重反射とは、発光部から射出されたパルス光が、対象物と受光部との間を反射によって複数回往復することを意味する。こうした多重反射やクラッタの影響によって、飛行時間を正しく計測できず、測距精度が低下する虞があった。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
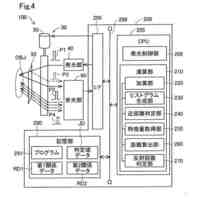
本開示の第1の形態によれば、測距装置(100,100b)が提供される。この測距装置は、パルス光を射出する発光部(40)と、対象物によって反射される前記パルス光の反射光を受光し、前記反射光に基づく出力信号(Sout)を出力する受光部(60)と、前記パルス光の飛行時間を利用して、前記対象物までの距離である対象物距離を演算する演算部(210)と、を備える。前記演算部は、前記出力信号に基づいて、前記受光部による前記反射光の受光強度を飛行時間ごとに表したヒストグラム(HG)を生成するヒストグラム生成部(230)と、前記ヒストグラムにおける前記受光強度のピーク(PK)の立ち上がりタイミング(RT)に基づいて、前記対象物が予め定められた近距離範囲にあるか否かを判定する近距離判定部(240)と、前記ヒストグラムに基づいて、前記パルス光が前記対象物と前記受光部との間を反射によって往復した回数を表す反射回数に関する特徴量を取得する特徴量取得部(250)と、前記対象物が前記近距離範囲にある場合、前記特徴量と、前記ピークの立ち下がりタイミング(FT)と、に基づいて前記対象物距離を算出する距離算出部(260,260b)と、を有する。
【0007】
このような形態によれば、対象物が近距離範囲にある場合、反射回数に関する特徴量と、ピークの立ち下がりタイミングとに基づいて対象物距離が算出される。立ち下がりタイミングに基づいて対象物距離が算出されることで、クラッタの影響による測距精度の低下が抑制される。また、反射回数に関する特徴量に基づいて対象物距離が算出されることで、多重反射の影響による測距精度の低下が抑制される。そのため、多重反射やクラッタの影響による測距精度の低下を抑制できる。
【図面の簡単な説明】
【0008】
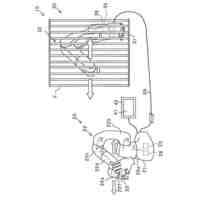
第1実施形態の測距装置の概略構成を示す説明図。
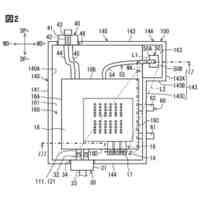
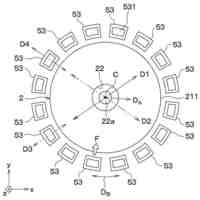
受光アレイの構成を模式的に示す説明図。
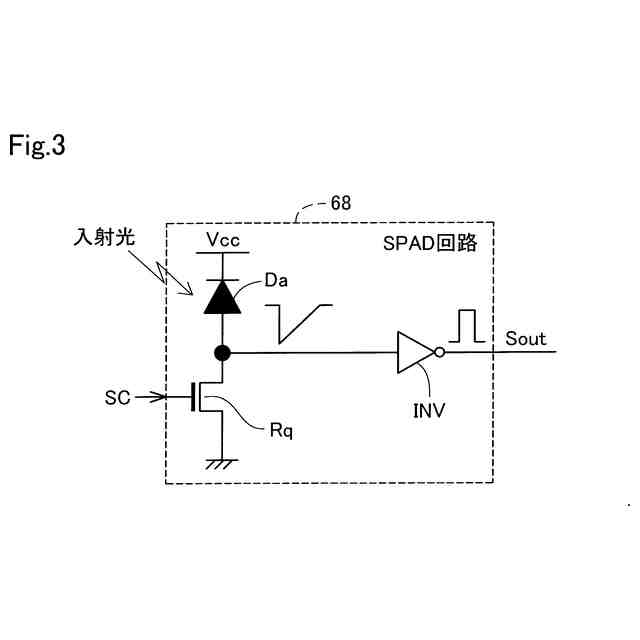
SPAD回路の構成を模式的に示す回路図。
第1実施形態の測距装置の概略構成を示すブロック図。
ヒストグラムの一例を示す説明図。
ヒストグラムの模式図。
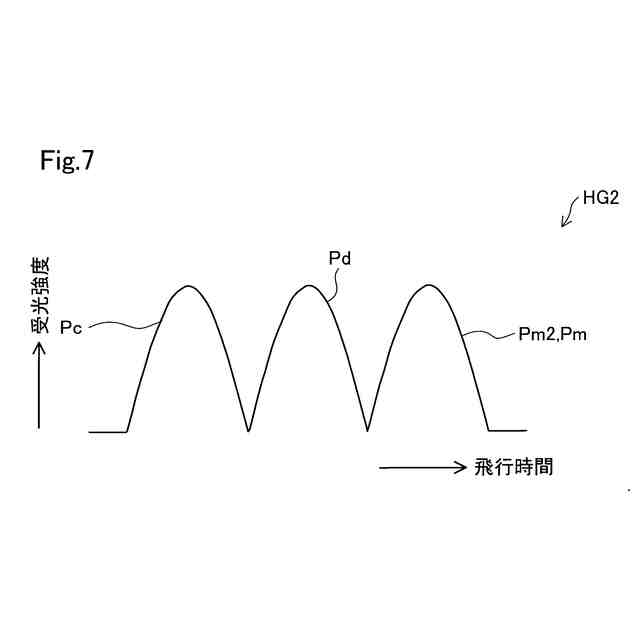
対象物が遠距離範囲にある場合のヒストグラムの例を示す模式図。
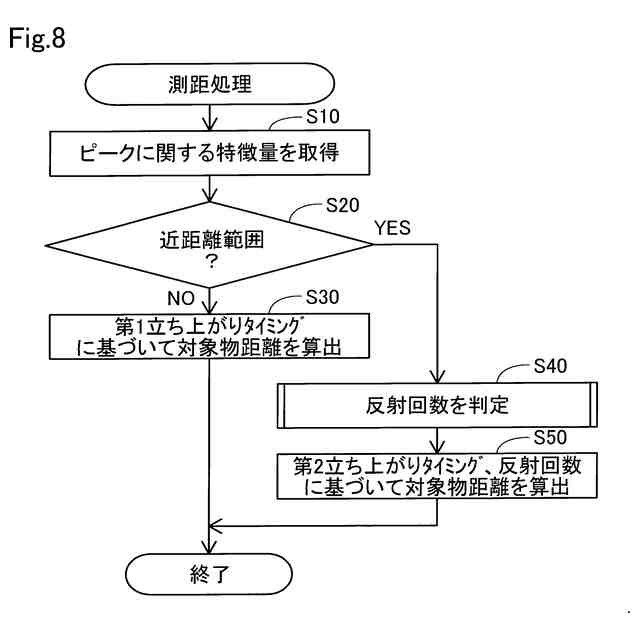
測距処理のフローチャート。
反射回数判定処理のフローチャート。
第1関係データを説明する図。
第2関係データを説明する図。
対象物が近距離範囲にある場合のヒストグラムの例を示す第1の模式図。
対象物が近距離範囲にある場合のヒストグラムの例を示す第2の模式図。
第2実施形態の測距装置の概略構成を示すブロック図。
第2実施形態における補正データを説明する図。
他の実施形態における補正データを説明する図。
【発明を実施するための形態】
【0009】
A.第1実施形態:
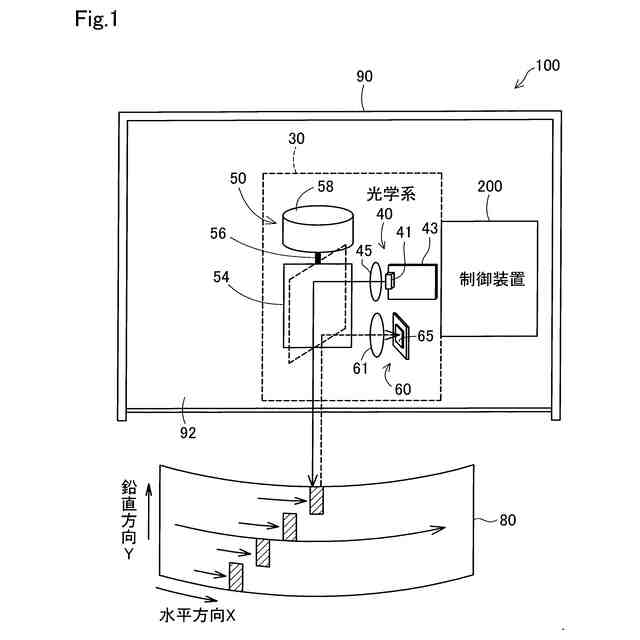
図1に示す測距装置100は、測距のためのパルス光を射出して外部物体からの反射光を受ける光学系30と、制御装置200とを備える。光学系30は、パルス光としてのレーザ光を射出する発光部40と、レーザ光を予め定められた視野範囲80内で走査させる走査部50と、外部物体からの反射光や外乱光を含む入射光を受光するための受光部60とを備える。測距装置100は、前面に窓92を有する筐体90に収容されている。パルス光は、窓92を介して測距装置100の外部へと射出され、その反射光は、窓92を介して測距装置100内へと入射する。窓92は、パルス光の多くを透過し、一部を反射する。
【0010】
測距装置100は、例えば、自動車などの車両に搭載される車載用のLiDAR(Laser Imaging Detection and Ranging)である。車両が水平な路面を走行している場合に、視野範囲80の横方向は水平方向Xと一致し、縦方向は鉛直方向Yと一致する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
測距装置
2日前
株式会社デンソー
真空装置
12日前
株式会社デンソー
圧電素子
2日前
株式会社デンソー
電気機器
2日前
株式会社デンソー
表示装置
9日前
株式会社デンソーテン
表示装置
12日前
株式会社デンソー
送風装置
11日前
株式会社デンソー
半導体装置
9日前
株式会社デンソー
蓄放熱材料
4日前
株式会社デンソー
ガスケット
4日前
株式会社デンソー
電力変換器
10日前
株式会社デンソー
電力変換器
10日前
株式会社デンソー
音低減装置
9日前
株式会社デンソー
運転支援装置
9日前
株式会社デンソー
物品昇降装置
16日前
株式会社デンソー
リニアモータ
12日前
株式会社デンソー
フィルタ装置
2日前
株式会社デンソー
流路形成装置
9日前
株式会社デンソー
流路形成装置
9日前
株式会社デンソー
車両用表示装置
9日前
株式会社デンソー
フィルムヒータ
2日前
株式会社デンソー
車両用空調装置
2日前
株式会社デンソーウェーブ
産業用ロボット
12日前
株式会社デンソー
モータ制御装置
3日前
株式会社デンソー
車両用表示装置
9日前
株式会社デンソー
車両用表示装置
11日前
株式会社デンソー
車両制御システム
9日前
株式会社デンソー
アンテナデバイス
4日前
株式会社デンソー
二酸化炭素供給装置
2日前
株式会社デンソーテン
車載装置及び識別方法
12日前
株式会社デンソー
パレット搬送システム
9日前
株式会社デンソー
慣性センサの製造方法
4日前
株式会社デンソーウェーブ
主従ロボットシステム
2日前
株式会社デンソー
電源装置、プログラム
4日前
株式会社デンソー
測距システム、測距方法
9日前
株式会社デンソーテン
判定装置および判定方法
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ