TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143082
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055577
出願日
2023-03-30
発明の名称
駆動装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
H02K
5/22 20060101AFI20241003BHJP(電力の発電,変換,配電)
要約
【課題】コネクタを適切に組み付け可能な駆動装置を提供する。
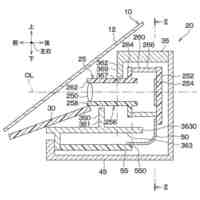
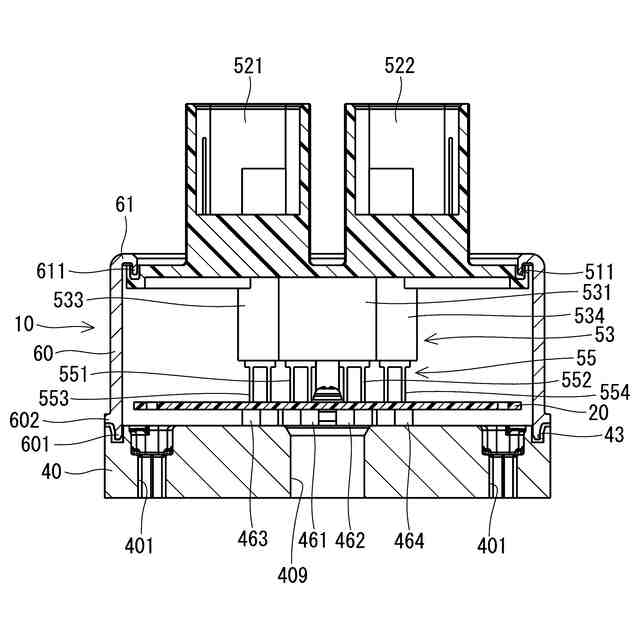
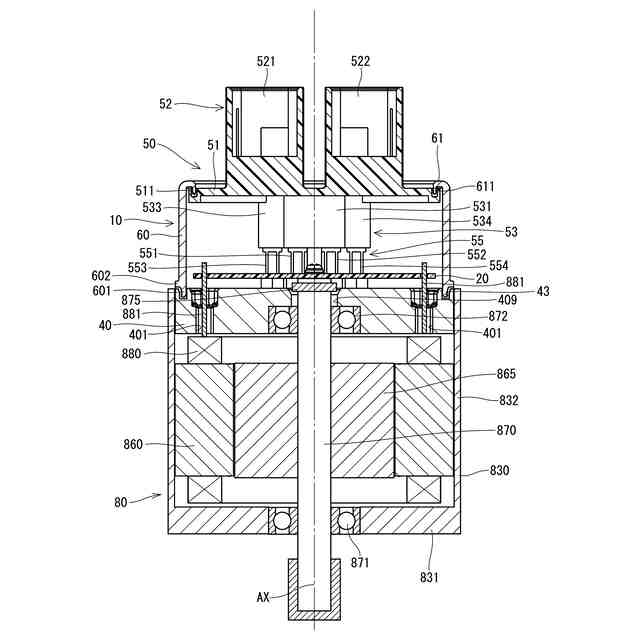
【解決手段】駆動装置1は、モータ80と、フレーム部材40と、基板20と、コネクタユニット50と、カバー60と、を備える。コネクタユニット50は、ベース部51、ベース部51のモータ80と反対側に設けられるコネクタ部52およびベース部51のモータ80側に設けられる複数の端子保持部53が一体に形成されており、端子保持部53から突出し、弾性接触により基板20と接続されるコネクタ端子55を有する。カバー60は、コネクタユニット50と別体で設けられ、コネクタ部52が外部に露出した状態で、基板20およびコネクタ端子55を内部に収容する。フレーム部材40には、コネクタ端子55と基板20とが接続される端子領域において、基板20側に突出して基板20と当接する荷重受け部461~466が形成されている。
【選択図】 図13
特許請求の範囲
【請求項1】
モータ(80)と、
前記モータの軸方向の一方側に設けられるフレーム部材(40)と、
前記フレーム部材の前記モータと反対側に固定される基板(20)と、
ベース部(51)、前記ベース部の前記モータと反対側に設けられるコネクタ部(52)および前記ベース部の前記モータ側に設けられる複数の端子保持部(53)が一体に形成されており、前記端子保持部から突出し、弾性接触により前記基板と接続されるコネクタ端子(55)を有するコネクタユニット(50)と、
前記コネクタユニットとは別体で設けられ、前記コネクタ部が外部に露出した状態で前記基板および前記コネクタ端子を内部に収容するカバー(60)と、
を備え、
前記フレーム部材には、前記コネクタ端子と前記基板とが接続される端子領域において、前記基板側に突出して前記基板と当接する荷重受け部(461~466、71~74)が形成されている駆動装置。
続きを表示(約 810 文字)
【請求項2】
前記フレーム部材には、固定部材(291~293)により前記基板が固定される基板固定部(491~493)が形成されており、
前記荷重受け部の高さは、前記基板固定部の高さと等しい請求項1に記載の駆動装置。
【請求項3】
前記コネクタ端子の先端側にて、前記基板に挿通される箇所を端子先端部とすると、
前記荷重受け部(461~466)は、それぞれの前記端子先端部の外周に環状に形成される請求項1または2に記載の駆動装置。
【請求項4】
前記コネクタ端子の先端側にて、前記基板に挿通される箇所を端子先端部とすると、
前記荷重受け部(71、72)は、少なくとも一部が開放された状態にて、複数の前記端子先端部からなる端子群を囲んで設けられる請求項1または2に記載の駆動装置。
【請求項5】
前記コネクタ端子の先端側にて、前記基板に挿入される箇所を端子先端部とすると、
前記荷重受け部(73、74)は、前記端子先端部に隣接して設けられる請求項1または2に記載の駆動装置。
【請求項6】
前記コネクタ端子は、径方向に複数列に配列されており、径方向内側の端子は、径方向外側の端子と周方向位置をずらして配置されている請求項1に記載の駆動装置。
【請求項7】
前記荷重受け部は、前記コネクタ端子が挿通される前記基板のスルーホールに形成される配線パターンとは離間しており、絶縁層にて前記基板と当接する請求項1に記載の駆動装置。
【請求項8】
前記カバーは、前記基板の径方向外側にて前記フレーム部材の前記モータと反対側に固定される第1固定部(601)、および、前記コネクタ部の径方向外側にて前記ベース部の前記モータと反対側に固定される第2固定部(611)を有する請求項1に記載の駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、モータと、モータへの通電を制御するコントローラとを組み付けて構成される駆動装置が知られている。例えば特許文献1では、給電用コネクタ端子および信号用コネクタ端子がプレスフィット端子であって、弾性接触により基板に接続されている。
【先行技術文献】
【特許文献】
【0003】
特許第6443055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、コネクタがカバー部材と一体であるため、コネクタと基板とを接続する際、ブラインド状態での組み付けとなる。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、コネクタを適切に組み付け可能な駆動装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の駆動装置は、モータ(80)と、フレーム部材(40)と、基板(20)と、コネクタユニット(50)と、カバー(60)と、を備える。フレーム部材は、モータの軸方向の一方側に設けられる。基板は、フレーム部材のモータと反対側の面に固定される。
【0007】
コネクタユニットは、ベース部(51)、ベース部のモータと反対側に設けられるコネクタ部(52)およびベース部のモータ側に設けられる複数の端子保持部(53)が一体に形成されており、端子保持部から突出し、弾性接触により基板と接続されるコネクタ端子(55)を有する。カバーは、コネクタユニットとは別体で設けられ、コネクタ部が外部に露出した状態で基板およびコネクタ端子を内部に収容する。
【0008】
フレーム部材には、コネクタ端子と基板とが接続される端子領域において、基板側に突出して基板と当接する荷重受け部(461~466、71~74)が形成されている。これにより、コネクタユニットと基板とを適切に組み付けることができる。
【図面の簡単な説明】
【0009】
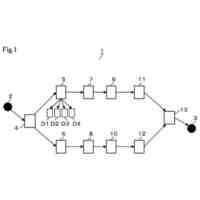
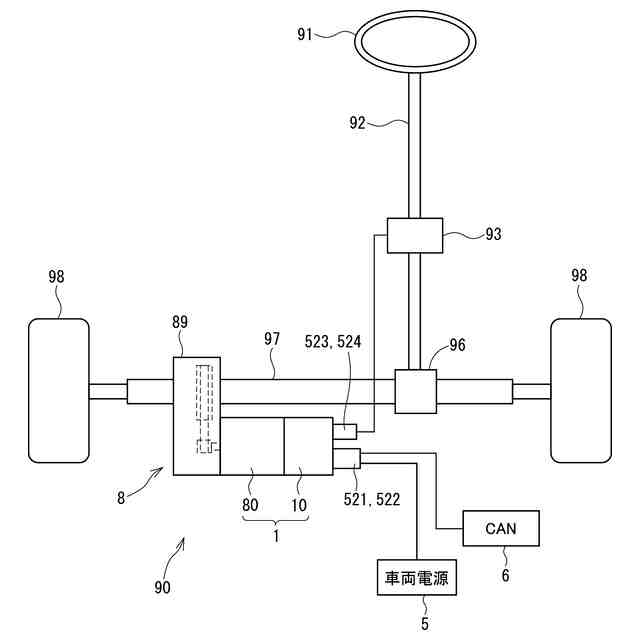
第1実施形態による電動パワーステアリング装置を示す概略構成図である。
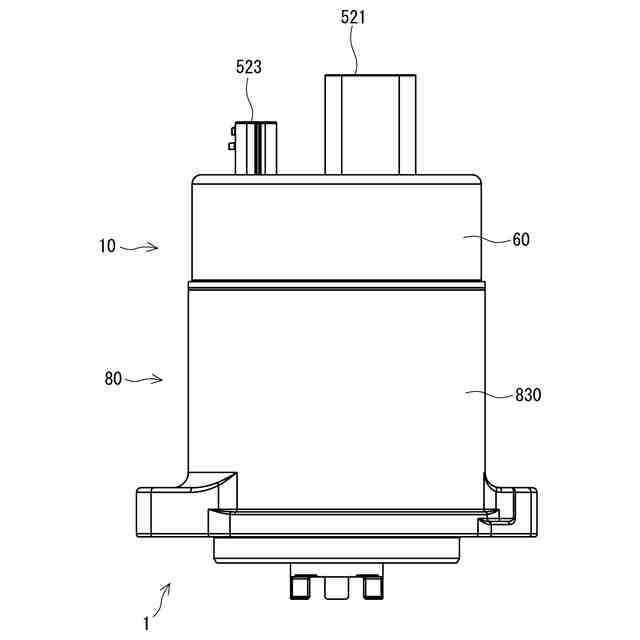
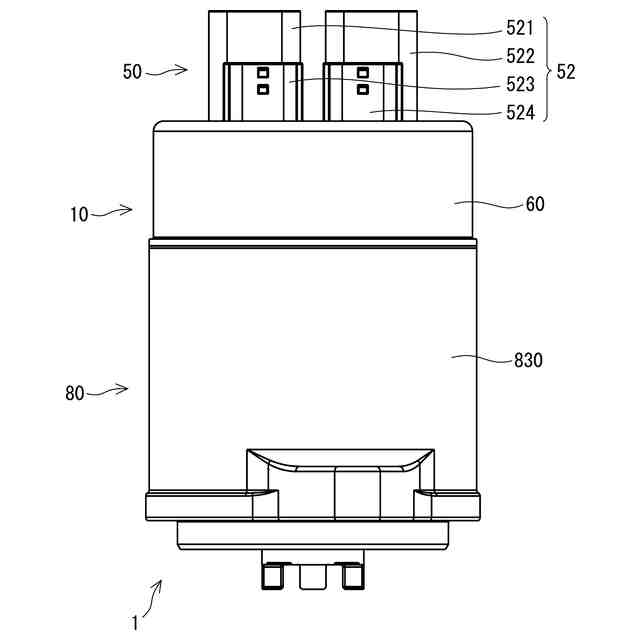
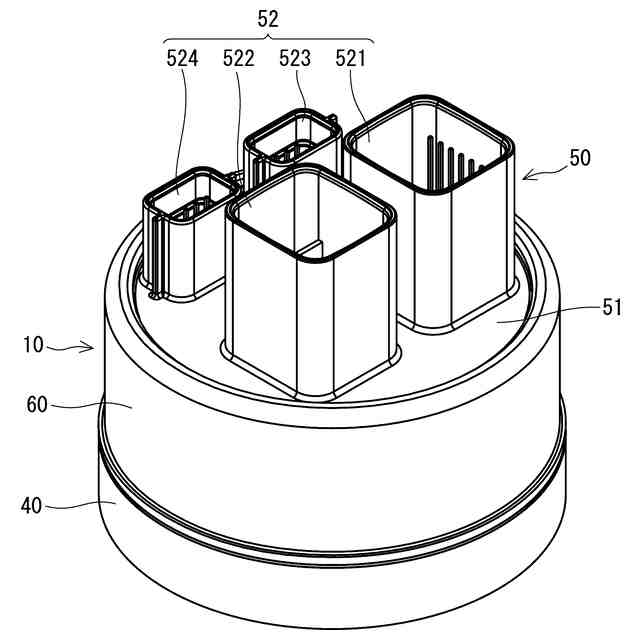
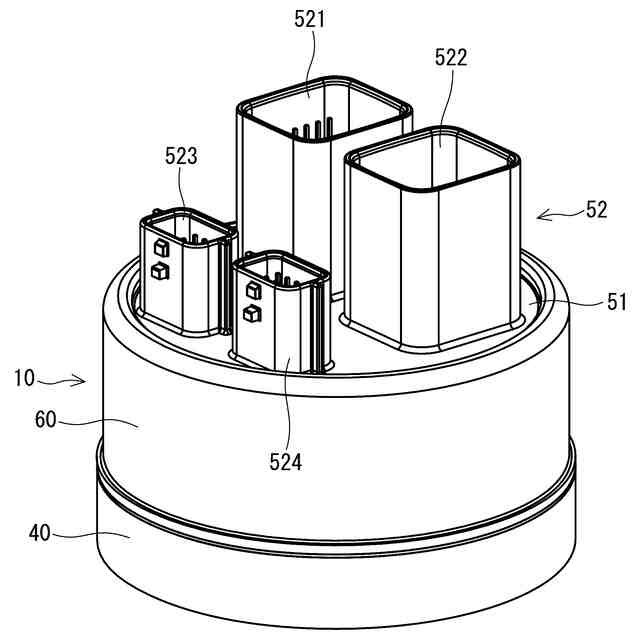
第1実施形態による駆動装置を示す斜視図である。
第1実施形態による駆動装置を示す平面図である。
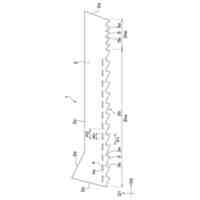
図3のIV方向矢視図である。
図3のV方向矢視図である。
図4のVI-VI線断面図である。
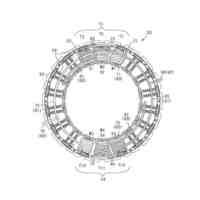
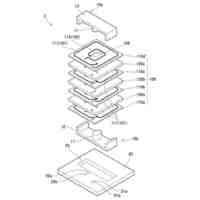
第1実施形態によるECUを示す斜視図である。
第1実施形態によるECUを示す斜視図である。
第1実施形態によるECUの平面図である。
図9のX方向矢視図である。
図9のXI-XI線断面図である。
図9のXII方向矢視図である。
図9のXIII-XIII線断面図である。
カバーの変形例を示す断面図である。
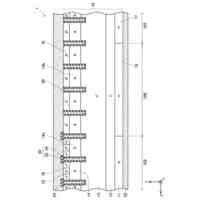
第1実施形態によるフレーム部材を示す斜視図である。
第1実施形態によるフレーム部材を示す斜視図である。
第1実施形態によるフレーム部材の平面図である。
図17のXVIII方向矢視図である。
図17のXIX-XIX線断面図である。
図17のXX方向矢視図である。
図17のXXI-XXI線断面図である。
第1実施形態による基板にコネクタユニットを組み付けた状態を示す平面図である。
図22のXXIII方向矢視図である。
図23のXXIV-XXIV線断面図である。
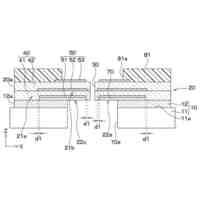
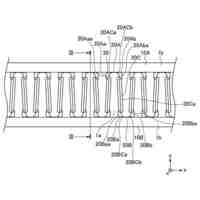
図24のXXV-XXV線断面図である。
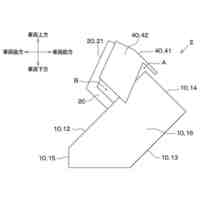
図25のXXVI部拡大図である。
第1実施形態によるフレーム部材の基板を組み付けた状態を示す斜視図である。
第1実施形態による基板にコネクタユニットを組み付けた状態を示す斜視図である。
第1実施形態によるフレーム部材を示す平面図である。
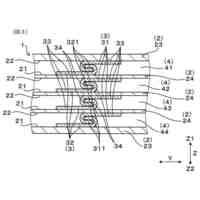
第1実施形態によるコネクタ端子と基板との接続状態を示す模式図である。
第2実施形態によるフレーム部材を示す平面図である。
第2実施形態による荷重受け部を説明する平面図である。
第2実施形態による荷重受け部を説明する平面図である。
端子配列を説明する模式図である。
第3実施形態による荷重受け部を説明する平面図である。
第3実施形態による荷重受け部を説明する平面図である。
第4実施形態によるECUを示す断面図である。
【発明を実施するための形態】
【0010】
以下、本発明による駆動装置を図面に基づいて説明する。以下、複数の実施形態において、実質的に同一の構成には同一の符号を付して説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
圧電素子
22日前
株式会社デンソー
撮像装置
20日前
株式会社デンソー
回転電機
7日前
株式会社デンソー
撮像装置
20日前
株式会社デンソー
通信装置
7日前
株式会社デンソー
操作装置
8日前
株式会社デンソー
光学部材
7日前
株式会社デンソー
熱交換器
20日前
株式会社デンソー
表示装置
22日前
株式会社デンソー
トランス
1日前
株式会社デンソー
熱交換器
14日前
株式会社デンソー
圧電素子
7日前
株式会社デンソー
撮像装置
20日前
株式会社デンソー
栽培装置
1日前
株式会社デンソー
熱輸送装置
6日前
株式会社デンソー
レーダ装置
8日前
株式会社デンソー
慣性センサ
20日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
ペダル装置
20日前
株式会社デンソー
電力変換装置
28日前
株式会社デンソー
携帯デバイス
20日前
株式会社デンソー
表示システム
22日前
株式会社デンソー
温度推定装置
20日前
株式会社デンソー
ステータコア
20日前
株式会社デンソー
電気化学セル
1日前
株式会社デンソー
電子制御装置
21日前
株式会社デンソー
燃料噴射装置
28日前
株式会社デンソー
電子制御装置
21日前
株式会社デンソーウェーブ
コードスキャナ
22日前
株式会社デンソー
モータ制御装置
20日前
株式会社デンソー
非接触給電装置
20日前
株式会社デンソー
フィン成形方法
7日前
株式会社デンソー
ロータの製造方法
20日前
株式会社デンソー
流体回路システム
20日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ