TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024150284
公報種別
公開特許公報(A)
公開日
2024-10-23
出願番号
2023063629
出願日
2023-04-10
発明の名称
インプリント装置、インプリント方法、及び物品の製造方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
H01L
21/027 20060101AFI20241016BHJP(基本的電気素子)
要約
【課題】モールドの位置ズレを減らすことができるインプリント装置を提供する。
【解決手段】基板上のインプリント材を、モールドを用いて成形するためのインプリント処理を行うインプリント装置において、前記モールドの側面に力を付与するための複数の接触部を用いて前記モールドの形状を補正する形状補正機構と、前記複数の接触部による接触状態を検出する検出手段と、前記検出手段の出力に応じて前記複数の接触部の駆動タイミング調整を行うことにより前記モールドを安定位置に向けて移動させる安定化動作を行う制御手段と、を有する。
【選択図】図6
特許請求の範囲
【請求項1】
基板上のインプリント材を、モールドを用いて成形するためのインプリント処理を行うインプリント装置において、
前記モールドの側面に力を付与するための複数の接触部を用いて前記モールドの形状を補正する形状補正機構と、
前記複数の接触部による接触状態を検出する検出手段と、
前記検出手段の出力に応じて前記複数の接触部の駆動タイミング調整を行うことにより前記モールドを安定位置に向けて移動させる安定化動作を行う制御手段と、を有することを特徴とするインプリント装置。
続きを表示(約 980 文字)
【請求項2】
前記制御手段は、少なくともインプリント処理前に、前記安定化動作を行うことを特徴とする請求項1に記載のインプリント装置。
【請求項3】
前記制御手段は、前記検出手段の出力をフィードバックしながら前記複数の接触部の前記駆動タイミング調整を行うことを特徴とする請求項1に記載のインプリント装置。
【請求項4】
前記検出手段は、前記モールドの側面位置を測定することにより前記接触状態を検出することを特徴とする請求項1に記載のインプリント装置。
【請求項5】
前記検出手段は、前記モールドに設けたマークの位置を測定することにより前記接触状態を検出することを特徴とする請求項1に記載のインプリント装置。
【請求項6】
前記制御手段は、前記検出手段の誤差を調整するように前記複数の接触部の駆動力を制御することを特徴とする請求項1に記載のインプリント装置。
【請求項7】
前記モールドをインプリントヘッドに保持するための保持手段を有し、
前記制御手段は、前記保持手段により前記モールドを前記インプリントヘッドに保持していない状態で、前記安定化動作を行うことを特徴とする請求項1に記載のインプリント装置。
【請求項8】
前記制御手段は、前記保持手段により前記モールドを前記インプリントヘッドに保持していない状態で、前記安定化動作を行った後で、前記保持手段により前記モールドを前記インプリントヘッドに保持した状態で、前記安定化動作を行うことを特徴とする請求項7に記載のインプリント装置。
【請求項9】
前記制御手段により前記安定化動作を行った際の、前記複数の接触部の前記駆動タイミング調整に関するパラメータを記憶するメモリを有することを特徴とする請求項1に記載のインプリント装置。
【請求項10】
前記メモリは、前記制御手段により前記安定化動作を行った際の、前記複数の接触部の前記駆動タイミング調整に関するパラメータを前記モールド毎に記憶し、前記モールドを使用する際に、記憶された前記パラメータを用いて次の前記安定化動作を行うことを特徴とする請求項9に記載のインプリント装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、インプリント装置、インプリント方法、及び物品の製造方法等に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
半導体デバイス等を製造するためのインプリント装置では、パターンの形成されたモールドをインプリント材(例えば光硬化樹脂)が塗布された基板上に押しつけて紫外光によってインプリント材を硬化させることでパターンを形成している。
【0003】
その際、モールドとシリコン基板は、押印前及び押印中にアライメントマークを基準に、モールドとシリコン基板の位置合わせを行っている。モールドの形状を補正するモールド形状補正ユニットも、アライメントステップ中にモールドの形状補正のために駆動制御されている。
【0004】
特許文献1には、モールド側面に力を付加してパターンのサイズを変更する事ができるアクチュエータシステムにおいて、各アクチュエータの動作においてモールドに与える力のバランスについて記載されている。又、特許文献2には、インプリントシーケンス中のモールド位置ズレを防止するための方法について記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2010-267973号公報
特開2017-79242号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし特許文献1、特許文献2のいずれにも、モールドを装着する際の、モールドのインプリントヘッドに対する初期位置の調整については考慮されておらず、インプリントサイクル中にモールドの位置がずれる場合がある。そのため、モールドと基板とのアライメントステップに時間を要してしまい、生産性の低下が生じる。
【0007】
本発明は、モールドの位置ズレを減らすことができるインプリント装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の1側面は、
基板上のインプリント材を、モールドを用いて成形するためのインプリント処理を行うインプリント装置において、
前記モールドの側面に力を付与するための複数の接触部を用いて前記モールドの形状を補正する形状補正機構と、
前記複数の接触部による接触状態を検出する検出手段と、
前記検出手段の出力に応じて前記複数の接触部の駆動タイミング調整を行うことにより前記モールドを安定位置に向けて移動させる安定化動作を行う制御手段と、を有することを特徴とする。
【発明の効果】
【0009】
本発明は、モールドの位置ズレを減らすことができるインプリント装置を提供することを目的とする。
【図面の簡単な説明】
【0010】
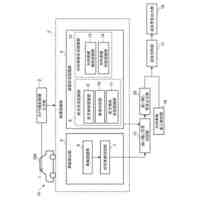
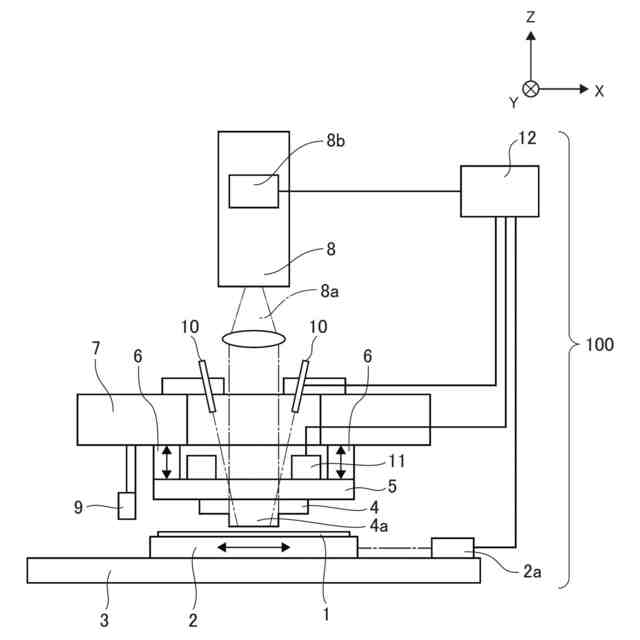
実施形態1に係るインプリント装置の構成例を示す図である。
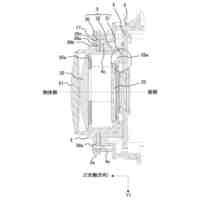
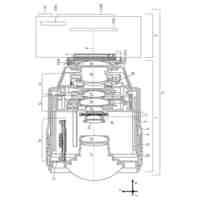
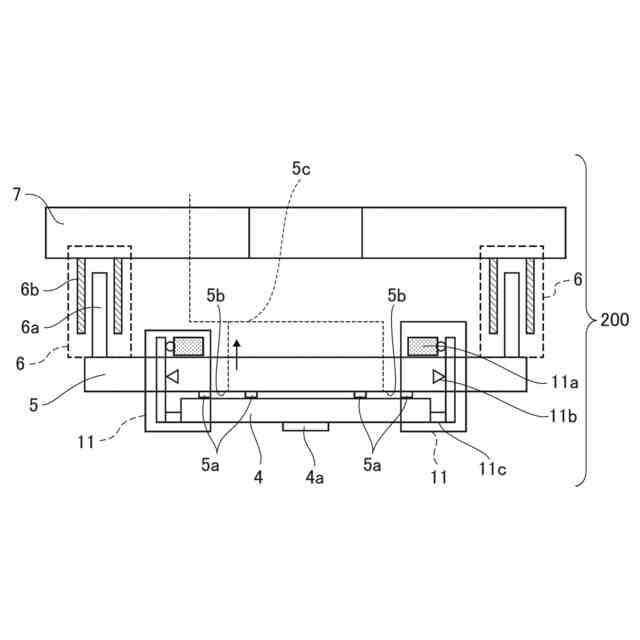
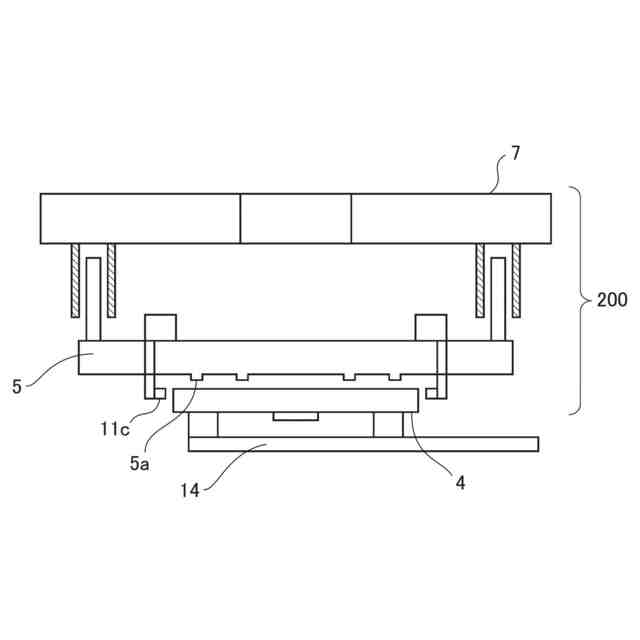
は、実施形態1に係るインプリントヘッド200の断面図である。
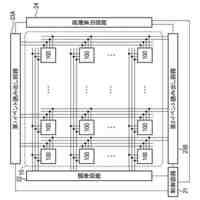
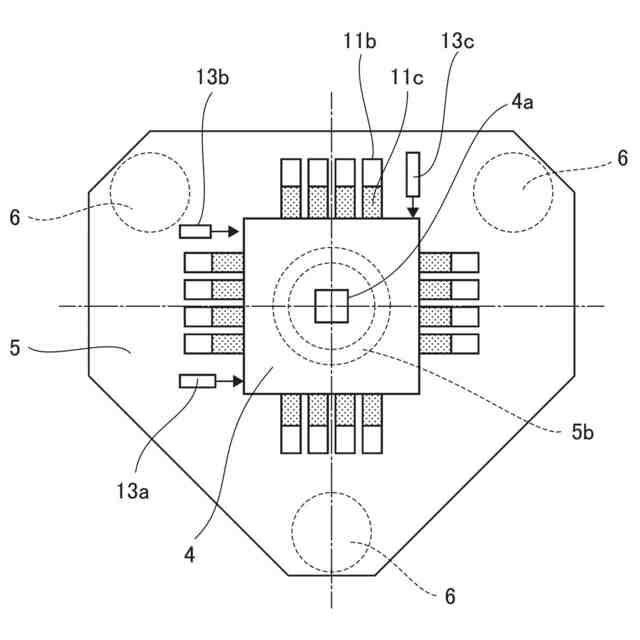
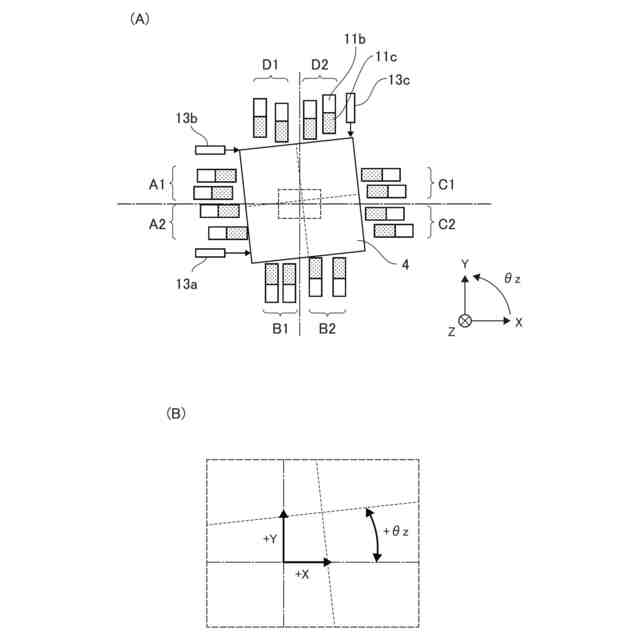
図2で示したインプリントヘッドを底面方向から見た図である。
(A)、(B)は、モールドの位置ズレが発生した時のモールドの動きを底面方向から見た図である。
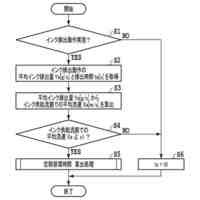
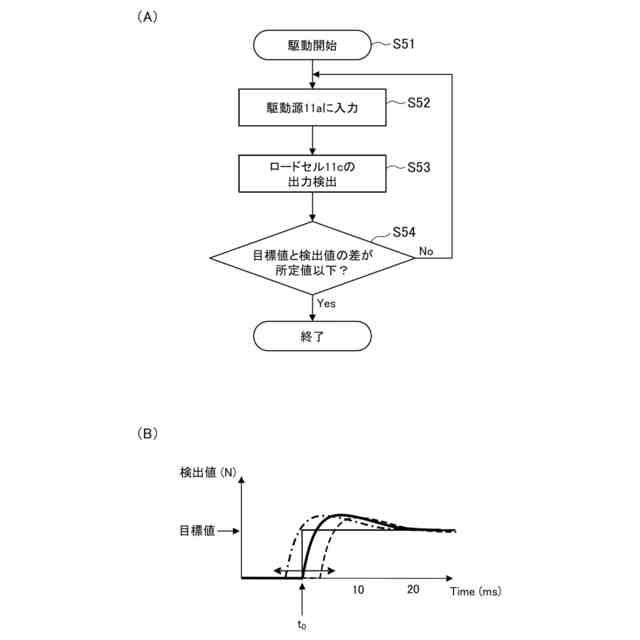
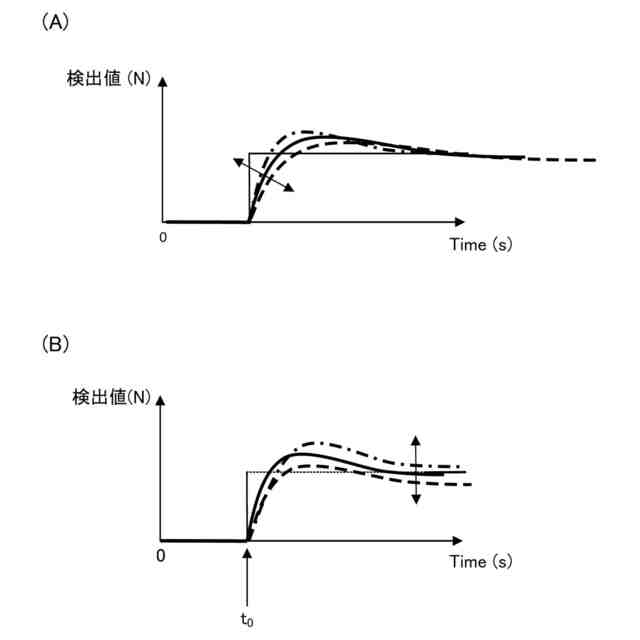
(A)は、実施形態1に係る駆動源の制御フローを説明するフローチャート、図5(B)はロードセルの力変化の例を示した図である。
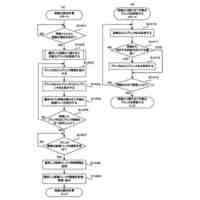
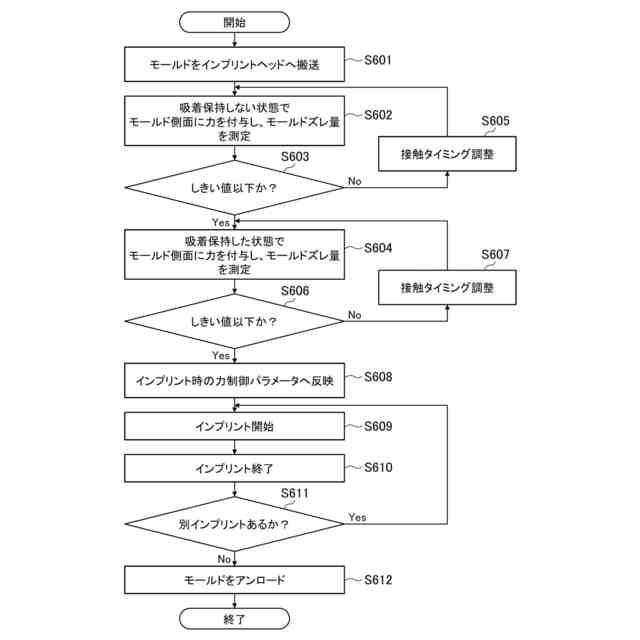
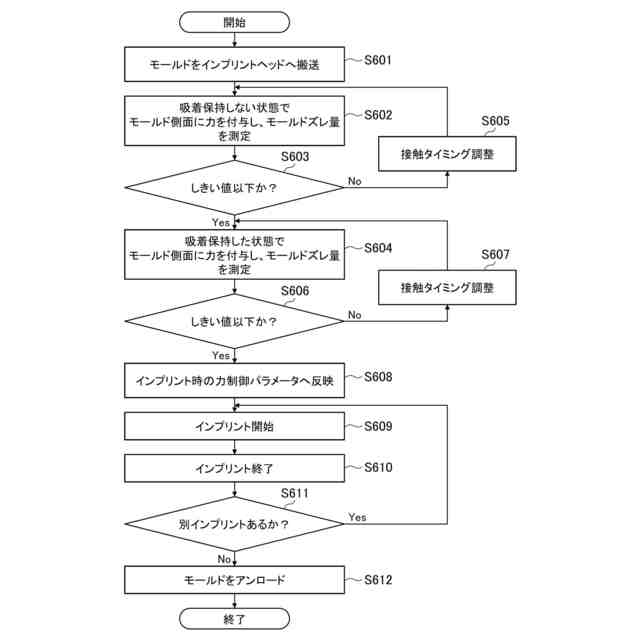
実施形態1に係るインプリント方法の処理フローの例を示したフローチャートである。
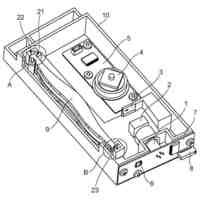
実施形態1に係るインプリントヘッド200と搬送ハンド14の例を示した図である。
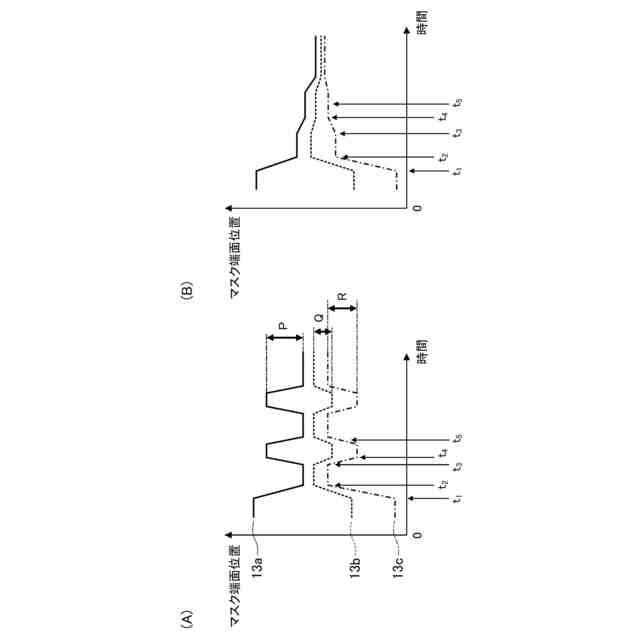
(A)、(B)は、実施形態1に係るモールド位置センサの出力値の変化例を説明するための図である。
(A)、(B)は、実施形態2に係るロードセルの力変化の例を説明するための図である。
実施形態3に係るインプリントヘッド200と搬送ハンド15の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
鏡筒
5日前
キヤノン株式会社
ボトル
5日前
キヤノン株式会社
電気機器
5日前
キヤノン株式会社
電子機器
5日前
キヤノン株式会社
発光装置
今日
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
光電変換装置
5日前
キヤノン株式会社
光学走査装置
5日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像表示装置
今日
キヤノン株式会社
画像形成システム
5日前
キヤノン株式会社
磁性トナーの製造方法
5日前
キヤノン株式会社
トナー及び二成分現像剤
5日前
キヤノン株式会社
レンズ装置及び撮像装置
5日前
キヤノン株式会社
記録装置、および記録方法
5日前
キヤノン株式会社
撮像装置およびその制御方法
5日前
キヤノン株式会社
撮像装置およびその制御方法
5日前
キヤノン株式会社
撮像装置およびその制御方法
5日前
キヤノン株式会社
定着装置および画像形成装置
5日前
キヤノン株式会社
ヘッドマウントディスプレイ
5日前
キヤノン株式会社
ズームレンズおよび撮像装置
5日前
キヤノン株式会社
露光装置、および物品製造方法
5日前
キヤノン株式会社
電子モジュールおよび撮像装置
5日前
キヤノン株式会社
シール部材およびその製造方法
5日前
キヤノン株式会社
記録装置およびインク循環方法
6日前
キヤノン株式会社
撮像装置、方法、及びプログラム
今日
キヤノン株式会社
光学系およびそれを有する撮像装置
今日
キヤノン株式会社
記録装置および記録装置の制御方法
5日前
キヤノン株式会社
符号化装置及び方法、及び電子機器
5日前
キヤノン株式会社
撮像装置および集中度判定システム
5日前
キヤノン株式会社
プログラム、コンピュータ及び管理方法
今日
キヤノン株式会社
情報処理装置、制御方法及びプログラム
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ