TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024147418
公報種別
公開特許公報(A)
公開日
2024-10-16
出願番号
2023060424
出願日
2023-04-03
発明の名称
測位システム及び測位方法
出願人
株式会社日立産機システム
代理人
青稜弁理士法人
主分類
G01S
19/40 20100101AFI20241008BHJP(測定;試験)
要約
【課題】測位精度を低下させることなく演算負荷を低減して測位することができる技術を提供する。
【解決手段】
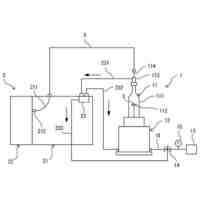
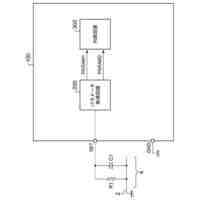
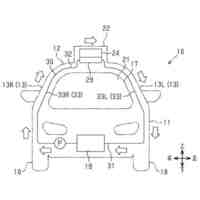
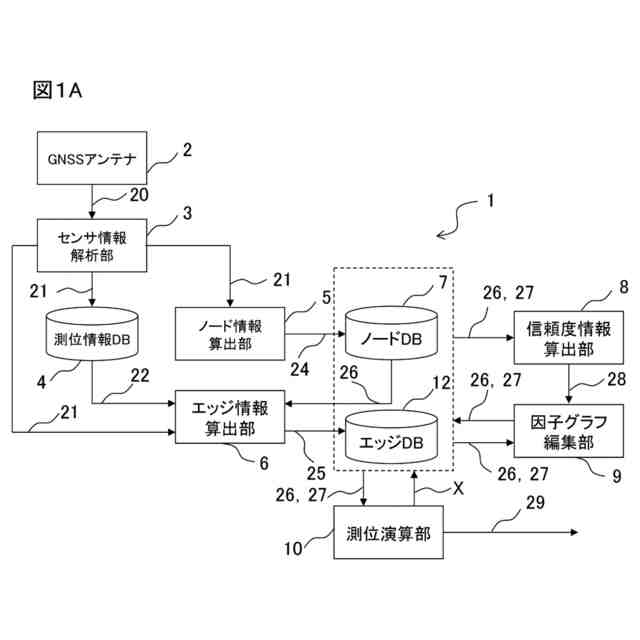
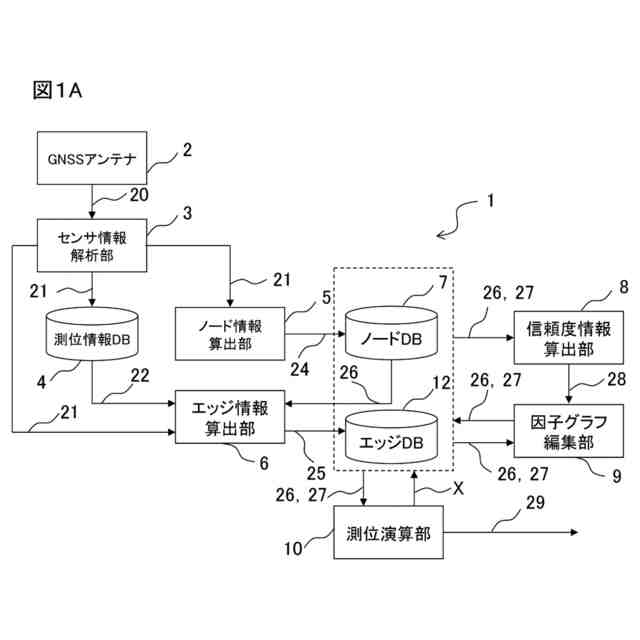
測位システム1は、複数の測位衛星から衛星信号を時系列に受信するGNSSアンテナ2と、衛星信号に基づいて複数の移動体情報を最適化変数とする複数のノードを算出するノード情報算出部5と、衛星信号に基づいて複数のノードの各々を拘束する複数のエッジを算出するエッジ情報算出部6と、複数のノードの各々に対する信頼度を算出する信頼度情報算出部8と、信頼度に基づいて複数のノード及び複数のエッジの中から選択したノード及びエッジを削除する因子グラフ編集部9と、複数のノード及び複数のエッジに基づいて因子グラフを構築し因子グラフの最適化によって移動体情報を算出する測位演算部10とを備える。
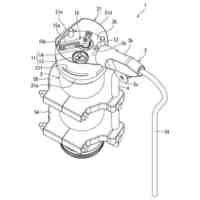
【選択図】 図1A
特許請求の範囲
【請求項1】
複数の測位衛星からの衛星信号に基づいて移動体の移動体情報を算出する測位システムにおいて、
前記複数の測位衛星から衛星信号を時系列に受信するアンテナと、
前記衛星信号に基づいて前記移動体情報を最適化変数とする複数のノードを算出するノード情報算出部と、
前記衛星信号に基づいて前記複数のノードの各々を拘束する複数のエッジを算出するエッジ情報算出部と、
前記複数のノードの各々に対する信頼度を算出する信頼度情報算出部と、
前記信頼度に基づいて前記複数のノード及び前記複数のエッジの中から選択したノード及びエッジを削除する因子グラフ編集部と、
前記複数のノード及び前記複数のエッジに基づいて因子グラフを構築し前記因子グラフの最適化によって前記移動体情報を算出する測位演算部とを備える測位システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の測位システムにおいて、
前記信頼度は、前記複数のノードの各々を拘束する前記複数のエッジの数である測位システム。
【請求項3】
請求項2記載の測位システムにおいて、
前記因子グラフ編集部は、予め定められた閾値より古い前記複数のノードの中から前記信頼度が最も低いノードを選択し、当該ノード及び当該ノードを拘束するエッジを削除する測位システム。
【請求項4】
請求項2記載の測位システムにおいて、
前記因子グラフ編集部は、前記ノードの総数が予め定められた閾値を上回る場合に、前記信頼度に基づいて前記複数のノード及び前記複数のエッジの中から選択したノード及びエッジを削除する測位システム。
【請求項5】
請求項2記載の測位システムにおいて、
前記移動体情報は、前記移動体の位置情報を含む測位システム。
【請求項6】
請求項2記載の測位システムにおいて、
前記移動体情報は、前記移動体の姿勢情報を含む測位システム。
【請求項7】
請求項2記載の測位システムにおいて、
前記測位演算部は、前記因子グラフの最適化に要した処理時間である最適化時間情報を算出する測位システム。
【請求項8】
請求項7記載の測位システムにおいて、
前記因子グラフ編集部は、前記最適化時間情報が予め定められた閾値を上回る場合に、前記信頼度に基づいて前記複数のノード及び前記複数のエッジの中から選択したノード及びエッジを削除する測位システム。
【請求項9】
請求項2記載の測位システムにおいて、
前記因子グラフ編集部は、前記信頼度に基づいて前記複数のノード及び前記複数のエッジの中から選択したノード及びエッジを削除しても前記因子グラフの最適化が可能な場合に、当該ノード及び当該エッジを削除する測位システム。
【請求項10】
複数の測位衛星からの衛星信号に基づいて移動体の移動体情報を算出する測位方法において、
前記複数の測位衛星から衛星信号を時系列に受信し、
前記衛星信号に基づいて前記移動体情報を最適化変数とする複数のノードを算出し、
前記衛星信号に基づいて前記複数のノードの各々を拘束する複数のエッジを算出し、
前記複数のノードの各々に対する信頼度を算出し、
前記信頼度に基づいて前記複数のノード及び前記複数のエッジの中から選択したノード及びエッジを削除し、
前記複数のノード及び前記複数のエッジに基づいて因子グラフを構築し前記因子グラフの最適化によって前記移動体情報を算出する測位方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測位システム及び測位方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
自動車や建設機械といった有人操作車両の自動化、自動点検ロボットによる工場点検作業の無人化といった人の作業を代替する自律作業機械の開発が進められており、最適化された機械動作による作業効率化、自動運転の実現による省人化、といった生産性向上が期待されている。
【0003】
このような自律作業機械を実現するためのコア技術の一つとして、非特許文献1に示すような全地球航法衛星システム(GNSS)やIMU、カメラ等のセンサ取得情報に、因子グラフを適用した測位技術が知られている。
【0004】
因子グラフによる測位では、センサ取得情報からノードとエッジで表現される因子グラフを構築し、因子グラフ最適化によりノードを調整することで、自律作業機械の過去から現在における位置及び姿勢をノードとして算出する。
【0005】
因子グラフによる測位では、ノード及びエッジ数に比例して測位精度が向上するが、ノード及びエッジ数を増加させると最適化変数が増加するため、因子グラフ最適化に要する演算負荷が増加してしまい、リアルタイムに自律作業機械の測位を行うことが困難となる場合が想定される。したがって、自律作業機械の測位に求められる測位精度及び演算時間を考慮し、適切なノード及びエッジを選択する必要がある。
【0006】
適切なノード及びエッジを選択する技術として、特許文献1には、移動体位置推定システムにおいて、任意の画像からの時間的な近さ、距離的な近さ、および、任意の画像と共通する特徴点の有無、の少なくともいずれかに基づいて、時系列画像の中から任意の画像とともに拘束条件を用いた調整の対象となる画像群を決定することが記載されている。
【先行技術文献】
【非特許文献】
【0007】
“Dellaert、F.(2012) 「Factor graphs and GTSAM: A hands-ON introduction」.Technical Report GT-RIM-CP&R-2012-002、 Georgia Institute of Technology.”
【特許文献】
【0008】
特開2020-67439号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1では、時間的な近さ、距離的な近さ、および共通する特徴点の有無に基づいて調整の対象となる画像群を決定しているが、GNSSによる測位では、時間経過に応じてセンサ取得情報の性質が変化するため、センサ取得情報に共通の特徴点が少ない場合がある。そのため、GNSSによる測位に特許文献1の技術を適用すると、因子グラフのノード数が少なくなり測位精度の低下が懸念される。
【0010】
本発明の目的は、測位精度を低下させることなく演算負荷を低減して測位することができる技術を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社トプコン
測量装置
5日前
株式会社アトラス
計量容器
4日前
株式会社チノー
気体流量調整機構
7日前
株式会社チノー
気体流量調整機構
7日前
アズビル株式会社
圧力センサ
7日前
アズビル株式会社
圧力センサ
7日前
株式会社島津製作所
分光光度計
7日前
株式会社島津製作所
熱分析システム
7日前
個人
レーザ距離計の計測用フォルダ
6日前
上海海事大学
河川水位監視システム
5日前
パイロットインキ株式会社
温度管理システム
11日前
ローム株式会社
半導体集積回路
11日前
TDK株式会社
磁気検出システム
5日前
エスペック株式会社
温度槽及び試験方法
7日前
株式会社PILLAR
液体センサ
7日前
豊田合成株式会社
センサの冷却構造
6日前
マシンビジョンライティング株式会社
撮像レンズ
7日前
地方独立行政法人青森県産業技術センター
採水器
11日前
株式会社豊田中央研究所
ガスセンサ
4日前
株式会社プロテリアル
鋼材中の非金属介在物の評価方法
11日前
JFEアドバンテック株式会社
水中測定機器
7日前
住友電気工業株式会社
算出プログラムおよび算出方法
6日前
住友金属鉱山株式会社
金属含有試料の解析方法
7日前
リンナイ株式会社
身体状態検出システム
5日前
株式会社TMEIC
回転電機
5日前
エクセン株式会社
断線検出装置
4日前
アンリツ株式会社
X線検査装置
7日前
トヨタ自動車株式会社
情報処理装置
4日前
日本電気株式会社
RF測定器、補正方法、及びプログラム
4日前
トヨタ自動車株式会社
推定装置
4日前
アンリツ株式会社
X線検査装置
7日前
株式会社ACSL
形状特定システムおよびプログラム
6日前
株式会社ACSL
位置推定システムおよびプログラム
6日前
株式会社島津製作所
蛍光X線分析装置
6日前
日立建機株式会社
ダンプトラック
7日前
株式会社トプコン
測量方法、測量システムおよびプログラム
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ