TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146221
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058999
出願日
2023-03-31
発明の名称
画像生成装置、画像読取システム、および、画像生成方法
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
H04N
1/04 20060101AFI20241004BHJP(電気通信技術)
要約
【課題】 ラインスキャナを用いて移動体の画像を取得できる画像生成装置、画像読取システム、および、画像生成方法を提供する。
【解決手段】 実施形態によれば、画像生成装置は、スキャナインターフェースとプロセッサとを備える。スキャナインターフェースは、読取位置においてライン情報を読み取るラインセンサを備えるラインスキャナと接続する。プロセッサは、読取位置を通過する移動体の移動速度を特定し、スキャナインターフェースにより接続するラインスキャナのラインセンサが所定の読取周期で読み取るライン情報を移動体の移動速度に応じて結合させた画像を生成する。
【選択図】図3
特許請求の範囲
【請求項1】
読取位置においてライン情報を読み取るラインセンサを備えるラインスキャナと接続するスキャナインターフェースと、
前記読取位置を通過する移動体の移動速度を特定し、前記スキャナインターフェースにより接続する前記ラインスキャナの前記ラインセンサが所定の読取周期で読み取るライン情報を前記移動体の移動速度に応じて結合させた画像を生成するプロセッサと、
を備える画像生成装置。
続きを表示(約 1,700 文字)
【請求項2】
さらに、前記移動体の移動速度の設定値を記憶する記憶部を有し、
前記プロセッサは、前記記憶部に記憶した前記移動体の移動速度の設定値に基づいて前記読取位置を通過する前記移動体の移動速度を特定する、
請求項1に記載の画像生成装置。
【請求項3】
さらに、前記移動体と通信する通信部を有し、
前記プロセッサは、前記通信部により前記移動体から移動速度と移動速度の取得時刻とを示す情報を取得し、前記移動体から取得する情報に基づいて前記ライン情報を取得した時刻における前記移動体の移動速度を特定する、
請求項1に記載の画像生成装置。
【請求項4】
さらに、前記移動体の速度を特定するための情報を検知するセンサに接続するセンサインターフェースを有し、
前記プロセッサは、前記センサインターフェースにより前記センサから取得する情報に基づいて前記読取位置を通過する前記移動体の移動速度を特定する、
請求項1に記載の画像生成装置。
【請求項5】
前記センサインターフェースに接続するセンサは、前記読取位置を通過する前記移動体の移動速度を計測する速度計測センサであり、
前記プロセッサは、前記センサインターフェースにより前記速度計測センサから取得する情報に基づいて前記移動体が前記読取位置を通過するときの移動速度を特定する、
請求項4に記載の画像生成装置。
【請求項6】
前記センサインターフェースに接続するセンサは、前記移動体が前記読取位置を通過中に前記移動体に配置されている形状基準部の形状を検知する形状センサであり、
前記プロセッサは、前記センサインターフェースにより前記形状センサから取得する前記形状基準部の検知結果に基づいて前記読取位置を通過する前記移動体の移動速度を特定する、
請求項4に記載の画像生成装置。
【請求項7】
前記センサインターフェースに接続するセンサは、前記移動体が前記読取位置を通過中に前記移動体に配置されている基準画像部の画像を読み取るイメージセンサであり、
前記プロセッサは、前記センサインターフェースにより前記イメージセンサから取得する前記基準画像部の読取結果に基づいて前記読取位置を通過する前記移動体の移動速度を特定する、
請求項4に記載の画像生成装置。
【請求項8】
前記プロセッサは、前記スキャナインターフェースにより前記ラインスキャナから取得するライン情報の一部から前記移動体に配置されている基準画像部の読取結果を抽出し、前記基準画像部の読取結果に基づいて前記読取位置を通過する前記移動体の移動速度を特定する、
請求項1に記載の画像生成装置。
【請求項9】
ライン状に配置した光電変換素子により構成するラインセンサを備え、読取位置において前記ラインセンサが読み取るライン情報を出力するラインスキャナと、
前記ラインスキャナが出力するライン情報から前記読取位置を通過する移動体の画像を生成する画像生成装置と、を有し、
前記画像生成装置は、
前記ラインスキャナに接続するスキャナインターフェースと、
前記読取位置を通過する前記移動体の移動速度を特定し、前記スキャナインターフェースにより接続する前記ラインスキャナの前記ラインセンサが所定の読取周期で取得するライン情報を前記移動体の移動速度に応じて結合させた画像を生成するプロセッサと、を備える、
画像読取システム。
【請求項10】
さらに、前記読取位置を通過する前記移動体を検知するセンサを有し、
前記画像生成装置は、さらに、前記センサに接続するセンサインターフェースを備え、
前記画像生成装置の前記プロセッサは、前記センサが前記読取位置を通過している前記移動体を検知する間に前記ラインセンサが読み取るライン情報を取得し、前記センサにより検知される前記読取位置を通過する前記移動体の移動速度を特定する、
請求項9に記載の画像読取システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、画像生成装置、画像読取システムおよび画像生成方法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、画像を読み取るスキャナには、主にエリアスキャナとラインスキャナとがある。エリアスキャナは、被撮影物を含む撮影範囲における各画素情報からなる画像情報を取得する。ラインスキャナは、1又は数ライン分のライン状の画像情報(以下、ライン情報とも称する)を取得する。ラインスキャナは、一般にエリアスキャナに比べて解像度およびノイズ量などの画質の面で優れているが、被撮影物に対して相対的に静止した状態では被撮影物を含む広範囲の画像を取得することができない。
【0003】
従来、コンベアなどで一定の速度で搬送される物体の画像を撮影するシステムではラインスキャナが用いられることがあるが、自律走行する移動体の画像を撮影するシステムにはラインスキャナが用いられていない。ラインスキャナ又はラインスキャナに接続する画像生成装置は、被撮影物とする移動体の移動速度を特定することが容易ではないため、ラインスキャナが取得する複数のライン情報から歪みが少ない移動体全体の画像を生成するのが難しいという問題がある。
【先行技術文献】
【特許文献】
【0004】
特開2019-125354号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、ラインスキャナを用いて移動体の画像を取得できる画像生成装置、画像読取システム、および、画像生成方法を提供することである。
【課題を解決するための手段】
【0006】
実施形態によれば、画像生成装置は、スキャナインターフェースとプロセッサとを備える。スキャナインターフェースは、読取位置においてライン情報を読み取るラインセンサを備えるラインスキャナと接続する。プロセッサは、読取位置を通過する移動体の移動速度を特定し、スキャナインターフェースにより接続するラインスキャナのラインセンサが所定の読取周期で読み取るライン情報を移動体の移動速度に応じて結合させた画像を生成する。
【図面の簡単な説明】
【0007】
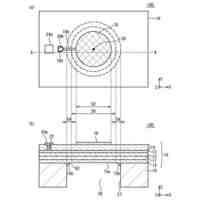
図1は、各実施形態に係る画像生成装置を含む画像読取システムの基本的な構成例を概略的に示す図である。
図2は、各実施形態に係る画像生成装置を含む画像読取システムの基本的な構成例を概略的に示す図である。
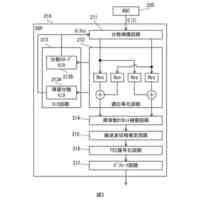
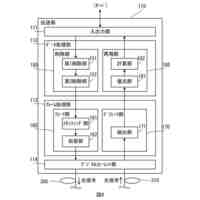
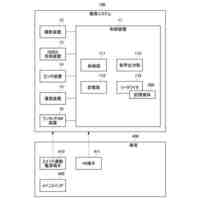
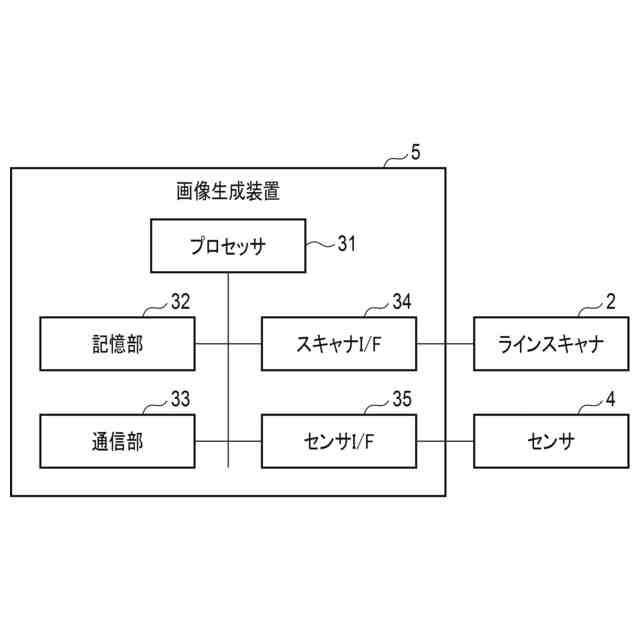
図3は、各実施形態に係る画像読取システムにおける画像生成装置の基本的な構成例を示すブロック図である。
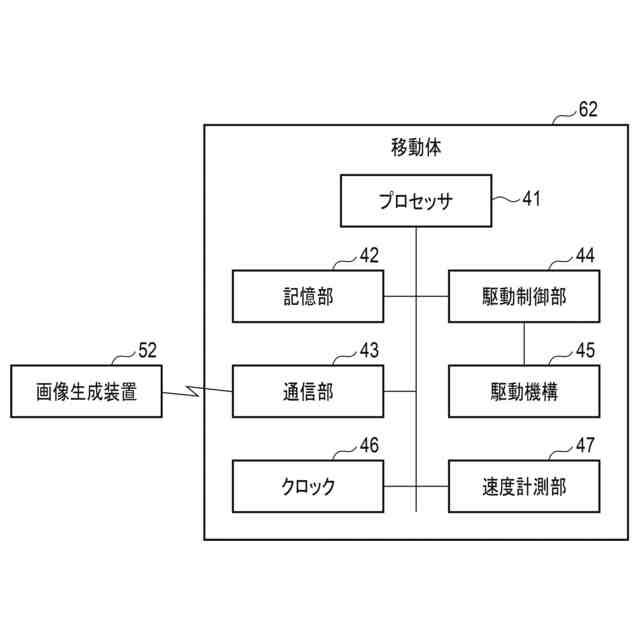
図4は、各実施形態に係る画像読取システムにおける移動体の基本的な構成例を示すブロック図である。
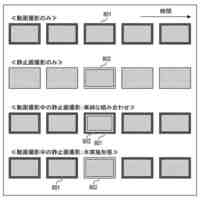
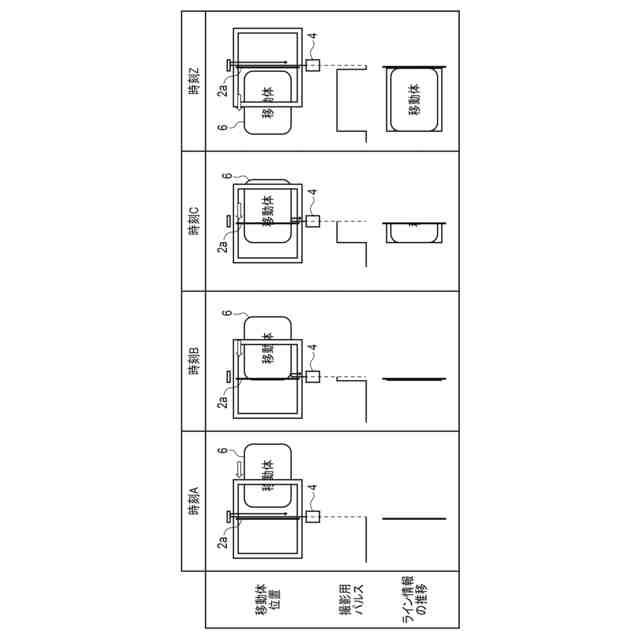
図5は、各実施形態に係る画像読取システムによってラインスキャナを用いて移動体全体の画像を生成する処理の流れを概略的に説明するための図である。
図6は、第1の実施形態に係る画像生成装置がラインスキャナを用いて移動体全体の画像を生成する画像生成処理を説明するためのフローチャートである。
図7は、第2の実施形態に係る画像生成装置および画像読取システムの構成例を示すブロック図である。
図8は、第2の実施形態に係る画像読取システムにおける移動体の構成例を示すブロック図である。
図9は、第2の実施形態に係る画像生成装置がラインスキャナを用いて移動体全体の画像を生成する画像生成処理を説明するためのフローチャートである。
図10は、第3の実施形態に係る画像生成装置を含む画像読取システムの全体構成例を概略的に示す図である。
図11は、第3の実施形態に係る画像生成装置を含む画像読取システムの全体構成例を概略的に示す図である。
図12は、第3の実施形態に係る画像生成装置の構成例を示すブロック図である。
図13は、第3の実施形態に係る画像生成装置がラインスキャナを用いて移動体全体の画像を生成する画像生成処理を説明するためのフローチャートである。
図14は、第4の実施形態に係る画像生成装置を含む画像読取システムの全体構成例を概略的に示す図である。
図15(a)は、第4の実施形態に係る画像読取システムにおける形状センサによる形状基準部の検知結果の例に示す図である。図15(b)は、図15(a)に示す形状センサの検知結果に対応する移動体の移動速度の例を示す図である。
図16は、第4の実施形態に係る画像生成装置の構成例を示すブロック図である。
図17は、第4の実施形態に係る画像読取システムにおける移動体の構成例を示すブロック図である。
図18は、第4の実施形態に係る画像生成装置がラインスキャナを用いて移動体全体の画像を生成する画像生成処理を説明するためのフローチャートである。
図19は、第5の実施形態に係る画像生成装置を含む画像読取システムの全体構成例を概略的に示す図である。
図20(a)は、第5の実施形態に係る画像読取システムにおけるイメージセンサによる基準画像部の読取結果の例に示す図である。図20(b)は、図20(a)に示すイメージセンサの読取結果に対応する移動体の移動速度の例を示す図である。
図21は、第5の実施形態に係る画像生成装置の構成例を示すブロック図である。
図22は、第5の実施形態に係る画像読取システムにおける移動体の構成例を示すブロック図である。
図23は、第5の実施形態に係る画像生成装置がラインスキャナを用いて移動体全体の画像を生成する画像生成処理を説明するためのフローチャートである。
図24は、第5の実施形態の変形例に係る画像生成装置を含む画像読取システムの全体構成例を概略的に示す図である。
【発明を実施するための形態】
【0008】
以下、種々の実施形態について、図面を参照して説明する。
まず、各実施形態に係る画像生成装置を有する画像読取システム1について概略的に説明する。
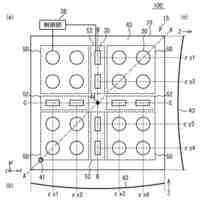
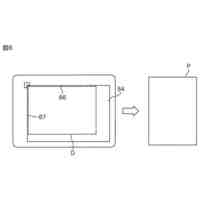
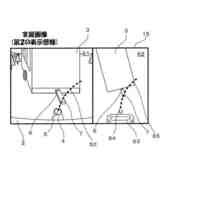
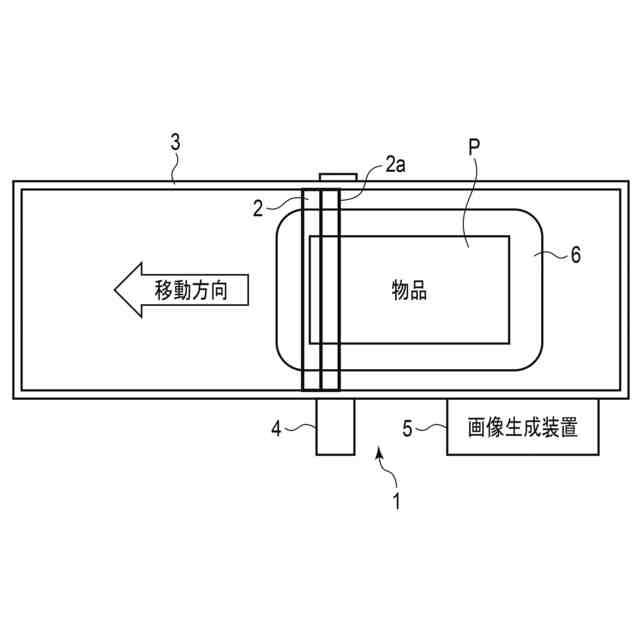
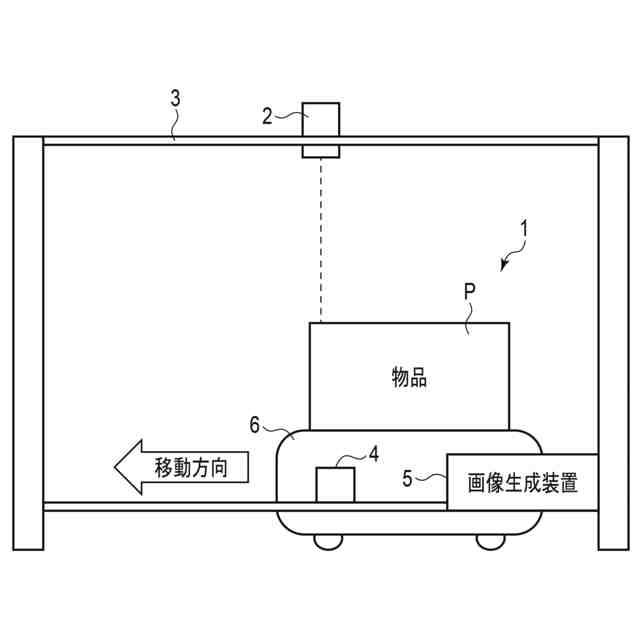
図1および図2は、各実施形態に係る画像読取システム1の基本的な構成を概略的に示す図である。図1は、物品Pを載せて移動する移動体6を上方から見た図であり、図2は、物品Pを載せて移動する移動体6を側方から見た図である。
【0009】
各実施形態に係る画像読取システム1は、基本的な構成として、ラインスキャナ2、フレーム3、センサ4、および、画像生成装置5および移動体6を有する。
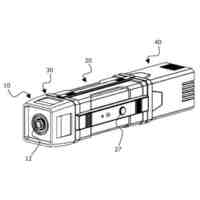
ラインスキャナ2は、ラインセンサ2a、制御部および入出力インターフェースなどにより構成される。ラインセンサ2aは、1ライン(又は数ライン)分の画素情報(以下、ライン情報とも称する)を読み取る。ラインセンサ2aは、所定方向に並べた複数の光電変換素子を有する。ラインセンサ2aを構成する各光電変換素子は、1ライン分の各画素に対応し、入力する光を電子信号に変換して出力する。ラインセンサ2aは、所定方向に並べた複数の光電変換素子が出力する電気信号を所定方向に並べた画素情報であるライン情報を出力する。
【0010】
ラインスキャナ2の入出力インターフェースは、外部装置としての画像生成装置5と接続するためのインターフェースであり、ラインセンサ2aが取得したライン情報を画像生成装置5へ出力する。また、入出力インターフェースは、画像生成装置5からの撮影用パルスを受信する。ラインスキャナ2の制御部は、ラインスキャナ2を制御するものであり、ラインセンサ2aを駆動させる駆動回路を含む。駆動回路は、画像生成装置5からの撮影用パルスに応じてラインセンサ2aを駆動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両の制御装置
18日前
キヤノン株式会社
撮像装置
18日前
太陽誘電株式会社
超音波装置
7日前
個人
平面映像の回転による立体映像
11日前
キヤノン株式会社
画像読取装置
7日前
ブラザー工業株式会社
印刷装置
15日前
アイホン株式会社
インターホン機器
12日前
株式会社小糸製作所
音発生ユニット
11日前
TOA株式会社
IP放送の停止、切替制御
4日前
株式会社ニコン
撮像装置
12日前
日本精機株式会社
ヘッドアップディスプレイ
7日前
富士通株式会社
光受信機及び光受信方法
7日前
キヤノン株式会社
電子機器
4日前
株式会社デンソー
通信装置
11日前
コクヨ株式会社
情報端末及びプログラム
15日前
富士通株式会社
光伝送装置及び光伝送方法
15日前
太陽誘電株式会社
超音波トランスデューサ
7日前
富士フイルム株式会社
超音波探触子
12日前
株式会社 ブロードウォッチ
撮像システム
4日前
ブラザー工業株式会社
印刷装置
6日前
京セラ株式会社
光通信装置
5日前
株式会社ユピテル
システム及びプログラム等
7日前
キヤノン株式会社
画像処理装置及び設定装置
11日前
株式会社日立国際電気
カメラシステム
18日前
株式会社アステックス
ネットワークシステム
5日前
株式会社アイシン
運転支援装置
12日前
シャープ株式会社
端末装置
4日前
SEIKOIST株式会社
携帯電話端末
12日前
ブラザー工業株式会社
印刷装置
6日前
矢崎総業株式会社
信号送受信装置
6日前
シャープ株式会社
端末装置
4日前
株式会社デンソー
無線通信装置及び無線通信方法
4日前
株式会社日立国際電気
無線端末及び無線システム
13日前
キヤノン株式会社
電子機器
18日前
TOMOエンターテインメント株式会社
撮影装置
4日前
アイホン株式会社
制御システム
13日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ