TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024124174
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023032164
出願日
2023-03-02
発明の名称
制御対象に対するフィードフォワード制御に関する機械学習のための装置、教師データの生成プログラム、および教師データの生成方法
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
13/02 20060101AFI20240905BHJP(制御;調整)
要約
【課題】制御対象に対するフィードフォワード制御の精度を向上させる。
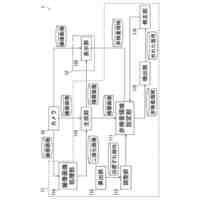
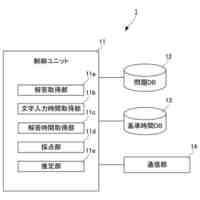
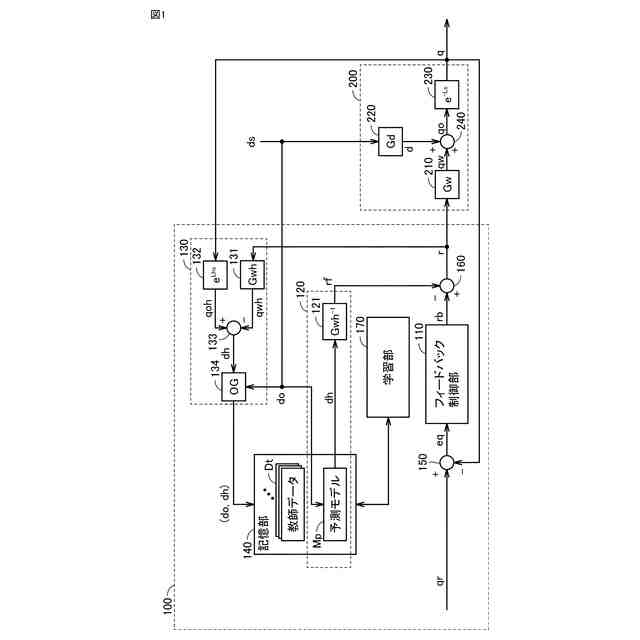
【解決手段】学習データ生成部130は、計測値do、操作量r、および制御量qを取得し、制御要素210の数式モデル131を用いて操作量rから一次制御量qwの第1推定値qwhを生成し、制御量qと、制御量qが取得された時刻から特定時間Lhだけ戻された時刻の第1推定値qwhとに基づいて変動量dの第2推定値dhを生成し、計測値doに、計測値doの時刻の第2推定値dhを正解として対応させた教師データDtを出力する。
【選択図】図1
特許請求の範囲
【請求項1】
外乱を受ける制御対象へのフィードバック操作量のフィードフォワード補償値の生成に必要な特定値を予測する予測モデルに対する機械学習のための装置であって、
前記フィードバック操作量は、目標値と前記制御対象の制御量との誤差に基づいて、前記制御量が前記目標値に近づくように前記制御対象の制御装置のフィードバック制御によって決定され、
前記フィードバック操作量から前記フィードフォワード補償値を引いた値が、操作量として前記制御対象に前記制御装置から出力され、
前記制御対象は、前記操作量を受ける数式モデルとして表現された制御要素と、前記外乱を受ける外乱要素と、むだ時間要素とによって表現され、
前記制御要素は、前記操作量を受けて一次制御量を出力し、
前記外乱要素は、前記外乱を受けて変動量を出力し、
前記むだ時間要素は、前記一次制御量と前記変動量との和が前記制御対象の外部に出力されることを遅延させ、
前記予測モデルは、前記外乱の計測値から前記変動量を前記特定値として予測し、
前記装置は、学習データ生成部を備え、
前記学習データ生成部は、
前記計測値、前記操作量、および前記制御量を取得し、
前記数式モデルを用いて前記操作量から前記一次制御量の第1推定値を生成し、
前記制御量と、前記制御量が取得された時刻から特定時間だけ戻された時刻の前記第1推定値とに基づいて前記変動量の第2推定値を生成し、
前記計測値に、前記計測値が取得された時刻の前記第2推定値を正解として対応させた教師データを出力する、装置。
続きを表示(約 1,700 文字)
【請求項2】
前記教師データを用いて前記予測モデルに対して前記機械学習を行う学習部をさらに備え、
前記学習部は、前記予測モデルによって表現される、前記計測値と前記第2推定値との関係を、前記第2推定値を目的変数とするとともに、前記計測値を説明変数とする関数として近似する、請求項1に記載の装置。
【請求項3】
前記数式モデルの逆モデルを用いて、前記予測モデルによって予測された前記変動量から前記フィードフォワード補償値を生成するフィードフォワード補償部をさらに備える、請求項1または2に記載の装置。
【請求項4】
外乱を受ける制御対象へのフィードバック操作量のフィードフォワード補償値の生成に必要な特定値を予測する予測モデルに対する機械学習のための教師データの生成プログラムであって、
前記フィードバック操作量は、目標値と前記制御対象の制御量との誤差に基づいて、前記制御量が前記目標値に近づくように前記制御対象の制御装置のフィードバック制御によって決定され、
前記フィードバック操作量から前記フィードフォワード補償値を引いた値が、操作量として前記制御対象に前記制御装置から出力され、
前記制御対象は、前記操作量を受ける数式モデルとして表現された制御要素と、前記外乱を受ける外乱要素と、むだ時間要素とによって表現され、
前記制御要素は、前記操作量を受けて一次制御量を出力し、
前記外乱要素は、前記外乱を受けて変動量を出力し、
前記むだ時間要素は、前記一次制御量と前記変動量との和が前記制御対象の外部に出力されることを遅延させ、
前記予測モデルは、前記外乱の計測値から前記変動量を前記特定値として予測し、
前記教師データの生成プログラムは、プロセッサに実行されることによって、
前記計測値、前記操作量、および前記制御量を取得し、
前記数式モデルを用いて前記操作量から前記一次制御量の第1推定値を生成し、
前記制御量と、前記制御量が取得された時刻から特定時間だけ戻された時刻の前記第1推定値とに基づいて前記変動量の第2推定値を生成し、
前記計測値に、前記計測値が取得された時刻の前記第2推定値を正解として対応させた教師データを出力する、教師データの生成プログラム。
【請求項5】
外乱を受ける制御対象へのフィードバック操作量のフィードフォワード補償値の生成に必要な特定値を予測する予測モデルに対する機械学習のための教師データの生成方法であって、
前記フィードバック操作量は、目標値と前記制御対象の制御量との誤差に基づいて、前記制御量が前記目標値に近づくように前記制御対象の制御装置のフィードバック制御によって決定され、
前記フィードバック操作量から前記フィードフォワード補償値を引いた値が、操作量として前記制御対象に前記制御装置から出力され、
前記制御対象は、前記操作量を受ける数式モデルとして表現された制御要素と、前記外乱を受ける外乱要素と、むだ時間要素とによって表現され、
前記制御要素は、前記操作量を受けて一次制御量を出力し、
前記外乱要素は、前記外乱を受けて変動量を出力し、
前記むだ時間要素は、前記一次制御量と前記変動量との和が前記制御対象の外部に出力されることを遅延させ、
前記予測モデルは、前記外乱の計測値から前記変動量を前記特定値として予測し、
前記教師データの生成方法は、
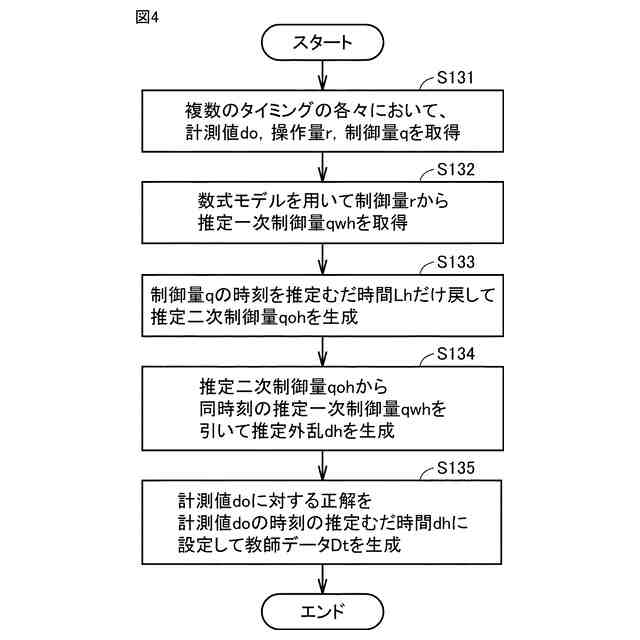
前記計測値、前記操作量、および前記制御量を取得することと、
前記数式モデルを用いて前記操作量から前記一次制御量の第1推定値を生成することと、
前記制御量と、前記制御量が取得された時刻から特定時間だけ戻された時刻の前記第1推定値とに基づいて前記変動量の第2推定値を生成することと、
前記計測値に、前記計測値が取得された時刻の前記第2推定値を正解として対応させた教師データを出力することとを含む、教師データの生成方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御対象に対するフィードフォワード制御に関する機械学習のための装置、教師データの生成プログラム、および教師データの生成方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、制御対象に対してフィードフォワード制御を行なう制御装置が知られている。たとえば、特開平10-222207号公報(特許文献1)には、外乱を受ける所定のプロセスに対して、フィードフォワード信号発生器による制御を行うフィードフォワード制御装置が開示されている。当該フィードフォワード制御装置は、フィードフォワード信号発生器における演算に必要なパラメータを、当該フィードフォワード信号発生器において算出されたパラメータから学習するパラメータ学習器を備える。
【先行技術文献】
【特許文献】
【0003】
特開平10-222207号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているフィードフォワード信号発生器に含まれるフィードフォワード補償器の構成は、予め定められている。一般に、フィードフォワード補償器のようなフィードバック制御のフィードフォワード補償値を算出する構成は、制御対象のプロセスの逆モデル(逆系)として設計される。プロセスの逆モデルの設計にはプロセスの分析を要するため、外乱の変動およびプロセスの特性の変化に応じて逆モデルの構造を短時間で更新することは困難である。そのため、特許文献1に開示されたフィードフォワード制御装置によると、外乱の変動の程度またはプロセスの特性の変化の程度によっては制御対象に対する制御への外乱の影響を抑制することが困難になり得る。
【0005】
本開示は上記のような課題を解決するためになされたものであり、その目的は、制御対象に対するフィードフォワード制御の精度を向上させることである。
【課題を解決するための手段】
【0006】
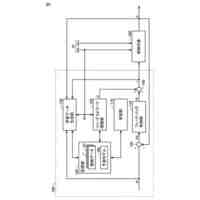
本開示の一局面に係る装置は、外乱を受ける制御対象へのフィードバック操作量のフィードフォワード補償値の生成に必要な特定値を予測する予測モデルに対する機械学習のための装置である。フィードバック操作量は、目標値と制御対象の制御量との誤差に基づいて、制御量が目標値に近づくように制御対象の制御装置のフィードバック制御によって決定される。フィードバック操作量からフィードフォワード補償値を引いた値が、操作量として制御装置から制御対象に出力される。制御対象は、操作量を受ける数式モデルとして表現された制御要素と、外乱を受ける外乱要素と、むだ時間要素とによって表現される。制御要素は、操作量を受けて一次制御量を出力する。外乱要素は、外乱を受けて変動量を出力する。むだ時間要素は、一次制御量と変動量との和が制御対象の外部に出力されることを遅延させる。予測モデルは、外乱の計測値から変動量を特定値として予測する。装置は、学習データ生成部を備える。学習データ生成部は、計測値、操作量、および制御量を取得し、制御要素の数式モデルを用いて操作量から一次制御量の第1推定値を生成し、制御量と、制御量が取得された時刻から特定時間だけ戻された時刻の第1推定値とに基づいて変動量の第2推定値を生成し、計測値に、計測値が取得された時刻の第2推定値を正解として対応させた教師データを出力する。
【0007】
この開示によれば、教師データにおいて計測値に対して適切な正解が関連付けられるため、教師データを用いて予測モデルに対して機械学習を行うことにより、制御対象に対するフィードフォワード制御の精度を向上させることができる。
【0008】
上記の開示において、装置は、教師データを用いて予測モデルに対して機械学習を行う学習部をさらに備える。学習部は、予測モデルによって表現される、計測値と第2推定値との関係を、第2推定値を目的変数とするとともに、計測値を説明変数とする関数として近似する。
【0009】
この開示によれば、フィードフォワード制御と並行して、計測値および制御対象の特性に予測モデルをリアルタイムに適合させることができる。
【0010】
上記の開示において装置は、数式モデルの逆モデルを用いて、予測モデルによって予測された変動量からフィードフォワード補償値を生成するフィードフォワード補償部をさらに備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
端子台
7日前
オムロン株式会社
電気機器
今日
オムロン株式会社
電気機器
7日前
オムロン株式会社
ソケット
7日前
オムロン株式会社
電動把持工具
6日前
オムロン株式会社
充放電システム
今日
オムロン株式会社
トリガスイッチ
6日前
オムロン株式会社
自律作業システム
21日前
オムロン株式会社
経路情報提供システム
16日前
オムロン株式会社
検出装置および操作装置
20日前
オムロン株式会社
X線検査装置及びX線検査方法
6日前
オムロン株式会社
外観検査装置、及び外観検査方法
今日
オムロン株式会社
制御装置、制御方法及びプログラム
21日前
オムロン株式会社
情報処理装置、方法およびプログラム
17日前
オムロン株式会社
情報処理装置、方法およびプログラム
17日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
7日前
オムロン株式会社
センサ装置及びセンサ装置を制御する方法
7日前
オムロン株式会社
生成装置、生成方法、及び生成プログラム
17日前
オムロン株式会社
評価装置、評価方法、および評価プログラム
17日前
オムロン株式会社
充放電コネクタ用ホルダ及び充放電システム
今日
オムロン株式会社
動力伝達機構、関節機構及び多関節ロボット
7日前
オムロン株式会社
磁性体コア、コイル部品、及び非接触給電システム
10日前
オムロン株式会社
解析装置、情報処理方法および情報処理プログラム
13日前
オムロン株式会社
情報処理装置、情報処理方法、及び情報処理プログラム
10日前
オムロン株式会社
情報処理装置、情報処理方法および情報処理プログラム
17日前
オムロン株式会社
文字入力装置、文字入力方法、および文字入力プログラム
7日前
オムロン株式会社
電動把持工具および電動把持工具の制御方法、制御プログラム
6日前
オムロン株式会社
電動把持工具の使用状況管理装置およびこれを備えた使用状況管理システム
6日前
オムロン株式会社
コード読取システム、コードリーダ、コード読取方法、およびコード読取プログラム
13日前
オムロン株式会社
補助ハンドル、これを備えた電動把持工具、補助ハンドルを用いた電動把持工具の制御方法および制御プログラム
6日前
オムロン株式会社
制御対象に対するフィードフォワード制御に関する機械学習のための装置、教師データの生成プログラム、および教師データの生成方法
7日前
オムロン株式会社
制御対象に対するフィードフォワード制御に関する機械学習のための装置、教師データの生成プログラム、および教師データの生成方法
7日前
エイブリック株式会社
定電圧回路
2か月前
株式会社豊田自動織機
自動走行体
今日
井関農機株式会社
作業車両
2か月前
株式会社FUJI
工作機械
22日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ