TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024113251
公報種別
公開特許公報(A)
公開日
2024-08-22
出願番号
2023018097
出願日
2023-02-09
発明の名称
自動均し作業ロボット
出願人
大成建設株式会社
,
日建リース工業株式会社
代理人
個人
,
個人
,
個人
主分類
E04G
21/10 20060101AFI20240815BHJP(建築物)
要約
【課題】打設コンクリート面の性状に応じて仕上げ作業を行うことができる床仕上げ用ロボットを開発する。
【解決手段】 打設コンクリート面の均し作業を行うモータ駆動型の床仕上げ用ロボットであって、
鏝回転軸と鏝回転軸に取り付けられたブレードとを有する鏝装置と、
ブレードの傾きを制御するブレード制御装置を備えており、
ブレード制御装置は、ブレードの傾きを調整する調整機構と調整機構を操作するコントローラを備えていることを特徴とする床仕上げ用ロボット。
【選択図】図2
特許請求の範囲
【請求項1】
打設コンクリート面の均し作業を行うモータ駆動型の床仕上げ用ロボットであって、
鏝回転軸と鏝回転軸に取り付けられたブレードとを有する鏝装置と、
ブレードの傾きを制御するブレード制御装置を備えており、
ブレード制御装置は、ブレードの傾きを調整する調整機構と調整機構を操作するコントローラを備えていることを特徴とする床仕上げ用ロボット。
続きを表示(約 440 文字)
【請求項2】
ブレードの傾きを調整する調整機構は、調整用モータを有し、
コントローラは、該調整用モータをコントロールすることを特徴とする請求項1記載の床仕上げ用ロボット。
【請求項3】
ブレードの傾きを調整する調整機構は、鏝装置の鏝回転軸に沿って上下動可能な上下動手段と、ブレードの軸に設けられたブレードアームと、上下手段とブレードアームを連結する接続リンクを備えており、調整用モータが上下動手段を駆動することを特徴とする請求項2記載の床仕上げ用ロボット。
【請求項4】
打設コンクリート面の状態を検知するコンクリート検知センサを備えており、
コンクリート検知センサの検知情報に基づいて、ブレードの傾きを制御することを特徴とする請求項1記載の床仕上げ用ロボット。
【請求項5】
コンクリート検知センサが、弾力検出センサあるいは振動検出センサ、レーザ距離センサであることを特徴とする請求項4記載の床仕上げ用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、コンクリートを打設した床面に対して均しを行う作業ロボットに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
床スラブ用にコンクリートを打設した場合、平に仕上げるために鏝仕上げが行われる。
腰をかがめて広いビルの床面の鏝仕上げを手作業で行うことは辛い作業であり、職人の確保も容易ではない。
鏝作業用の機器の開発はいくつか行われている。
本出願人は、先に、特許文献1(特許第7129873号公報)として、均し作業と移動を兼用する回転ブレードを備えた、自動走行できる均し作業ロボットを提案した。
【0003】
特許文献2(特開2022-81216号公報)には、均し作業後の床スラブ90の上面92を走行しながら上面92の仕上げ作業を行う作業装置10と、作業対象領域の周囲に設置されたマーカー102A、102Bと、作業装置10に設けられた撮像装置112と、撮像装置112が撮像したマーカー102A及びマーカー102Bの少なくとも一方を含む画像によって作業装置10の自己位置を把握し作業経路に沿って作業装置10を走行させる制御装置と、を備えた仕上げ作業システム100が提案されている。
特許文献3(特開2021-123897号公報)には、鏝押さえ機構21による床面1の鏡面仕上げ作業前後の床面1の状態をハイパースペクトルカメラ30で撮像し、取得された、鏝押さえ作業前後の床面1の反射強度の差分から鏡面仕上げ作業の完了タイミングを判断する床コンクリート鏡面仕上げ装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7129873号公報
特開2022-81216号公報
特開2021-123897号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、打設コンクリート面の性状に応じて仕上げ作業を行うことができる床仕上げ用ロボットを開発することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、均し作業中に鏝のブレードの角度を制御して、打設コンクリートの状態に応じた床仕上げを行うことができる床仕上げロボットを開発した。本発明の要旨は次のとおりである。
1.打設コンクリート面の均し作業を行うモータ駆動型の床仕上げ用ロボットであって、
鏝回転軸と鏝回転軸に取り付けられたブレードとを有する鏝装置と、
ブレードの傾きを制御するブレード制御装置を備えており、
ブレード制御装置は、ブレードの傾きを調整する調整機構と調整機構を操作するコントローラを備えていることを特徴とする床仕上げ用ロボット。
2.ブレードの傾きを調整する調整機構は、調整用モータを有し、
コントローラは、該調整モータをコントロールすることを特徴とする1.記載の床仕上げ用ロボット。
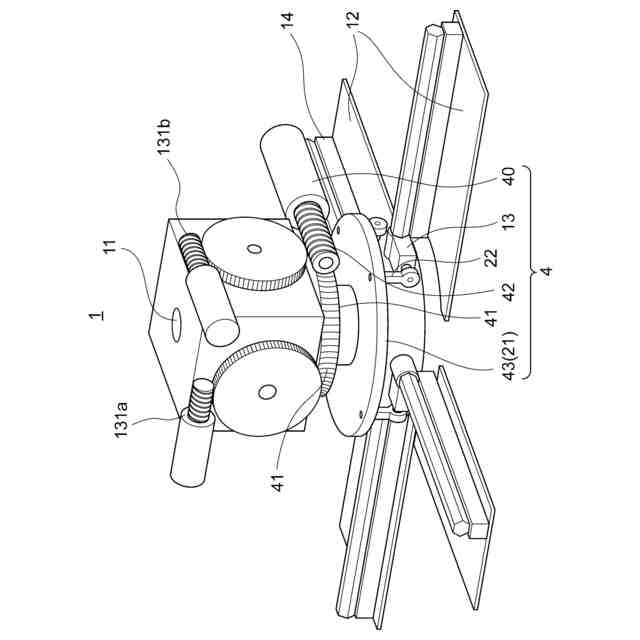
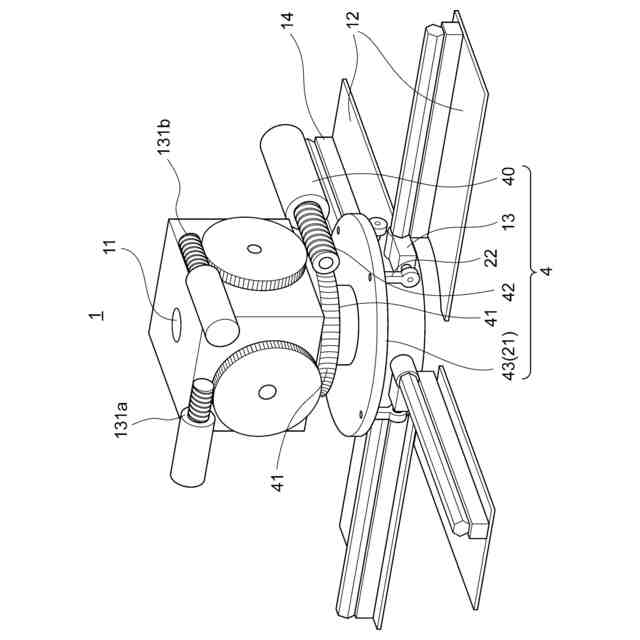
3.ブレードの傾きを調整する調整機構は、鏝装置の鏝回転軸に沿って上下動可能な上下動手段と、ブレードの軸に設けられたブレードアームと、上下手段(プレート)とブレードアームを連結する接続リンクを備えており、調整用モータが上下動手段を駆動することを特徴とする2.記載の床仕上げ用ロボット。
4.打設コンクリート面の状態を検知するコンクリート検知センサを備えており、
コンクリート検知センサの検知情報に基づいて、ブレードの傾きを制御することを特徴とする1.記載の床仕上げ用ロボット。
5.コンクリート検知センサが、弾力検出センサあるいは振動検出センサ、レーザ距離センサなどであることを特徴とする4.記載の床仕上げ用ロボット。
【0007】
本発明は、次の構成を要旨とするものである。
【発明の効果】
【0008】
1.本発明は、均し作業中に鏝のブレードの角度を制御して、打設コンクリートの状態に応じた床仕上げを行うことができる床仕上げロボットを開発した。コンクリートの打設経過によって、鏝仕上げ中のコンクリートの硬化状態や粗さ(凸凹)が変化することがあり、ブレードの傾きをロボットの稼働中に調整用モータを遠隔操作することによって、ブレードの傾きを調整して、コンクリートの状態に即応した仕上げ処理が可能となった。
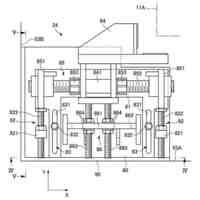
2.ブレードの傾きを鏝の回転軸に沿って上下する手段で、制御することによって、鏝の回転軸の駆動に影響されずに、ブレードの傾きを制御できる。特に、上下手段を鏝回転軸の外側に設けたプレートとブレードの軸に設けられたブレードアームを接続リンクで連結して、プレートの上下に応じて、ブレードの傾きを調整できるようにした。複数のブレードを一枚のプレートの上下によって、同じ制動を行うことができる機構である。
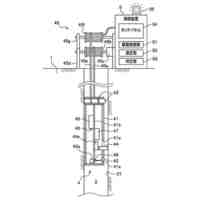
3.搭載した打設コンクリート面の性状を検知する検知センサの検知情報に基づいて、ブレードの傾きをコントロールできるので、コンクリートの状態に応じた床仕上げをすることができる。検知センサとして、弾力検出センサあるいは振動検出センサ、レーザ距離センサなどを用いることができ、打設コンクリート面の硬化状態を数値として評価し、当該数値に基づいて、鏝装置の鏝回転軸が制御され、鏝回転軸を介して回転ブレードの角度が調整される。また、コンクリート表面は、弾力検出センサまたは振動検出センサ、レーザ距離センサによる数値情報に基づいて、定量的に所定の平滑度に仕上げることが可能となる。
4.均し作業と走行を行う床仕上げ用ロボットは、ほぼ水平な平板である回転するブレードで打設されたコンクリートに接地している。打設されたコンクリートが硬化し始める初期硬化の状態では、微妙な高度差や表面粗さの違いがあって、ブレードに対して抵抗差が生じる。コンクリートの硬化程度の差は、左右の回転ブレードへの抵抗差となり、蛇行走行など原因となり、均し作業の乱れとなる。本発明では、コンクリートの柔らかさや表面粗さを検知して、ブレードの傾きを調整できるので、走行が安定し、均しむらや蛇行走行を減少させることができる。その結果、床仕上げの品質向上とともに、床仕上げ作業の短縮を図ることができる。
【図面の簡単な説明】
【0009】
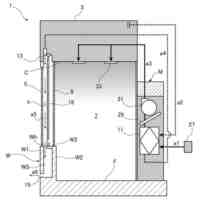
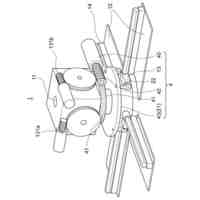
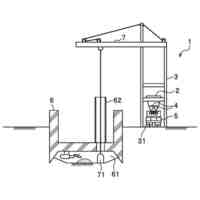
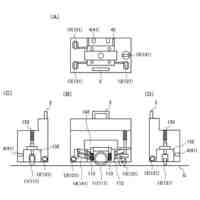
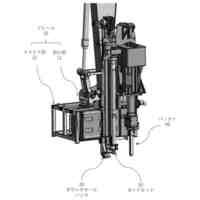
床仕上げ用ロボットの概略図
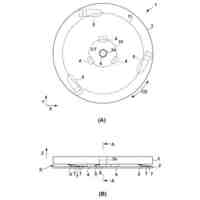
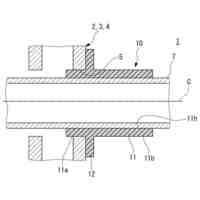
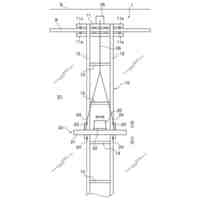
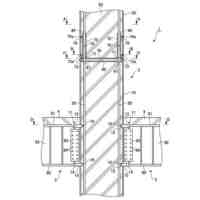
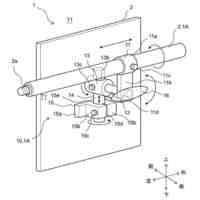
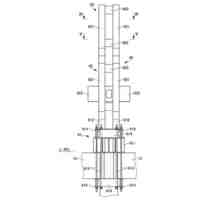
鏝装置の概略図
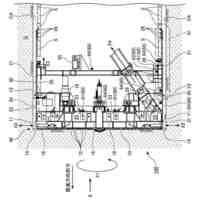
鏝装置の下部断面構造の概略図
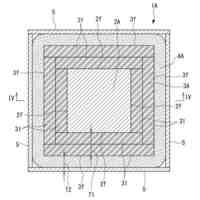
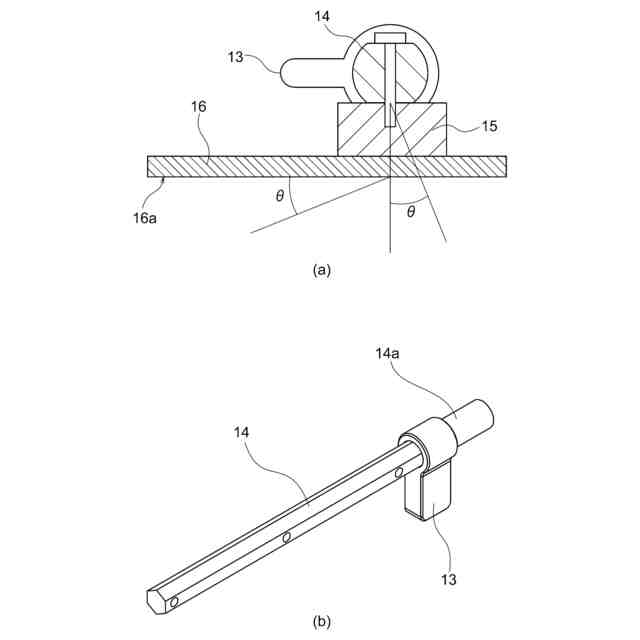
ブレードの概略図
ブレードのフィンの概略図
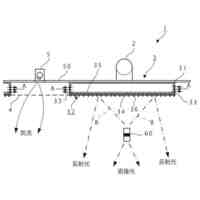
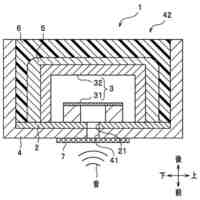
鏝装置の下部にコンクリ―の表面性状を検出するセンサを設けた例を示す概略図
【発明を実施するための形態】
【0010】
複数の鏝装置を備えた打設コンクリート面を仕上げる電動の均し作業ロボットにおいて、鏝装置は回転軸と回転軸に取り付けられた複数枚のブレードを備えており、鏝装置の回転軸は傾きと回転数が制御可能であって、鏝装置の回転軸の、設定ルートに沿って、均し作業を行いながら自動的に移動する自動均し作業ロボットである、回転数と傾きを制御して均し制御と走行制御がなされる床仕上げ用ロボットは、特許第7129873号に提案した。
本発明は、先に提案した床仕上げ用ロボットに、ブレードの傾きを仕上げ作業中に調整して、打設コンクリートの硬軟や波うちの状態に応じた、仕上げ作業を行うことができる、ブレード制御を設けた床仕上げ用ロボットを提案する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大成建設株式会社
制振装置
19日前
大成建設株式会社
基礎構造
27日前
大成建設株式会社
補強用繊維
18日前
大成建設株式会社
窓システム
20日前
大成建設株式会社
木質耐火部材
21日前
大成建設株式会社
放射空調ダクト
20日前
大成建設株式会社
座屈拘束ブレース
21日前
大成建設株式会社
防水マイクロホン
1か月前
大成建設株式会社
避難誘導システム
19日前
大成建設株式会社
自動均し作業ロボット
26日前
大成建設株式会社
放射線遮蔽体、および照射室
1か月前
大成建設株式会社
土砂ホッパーおよび土砂搬出方法
1か月前
大成建設株式会社
壁面施工装置および壁面施工方法
21日前
大成建設株式会社
水処理用分離膜および水処理方法
14日前
大成建設株式会社
洗掘防止構造および杭の施工方法
25日前
大成建設株式会社
濁水処理装置および濁水処理方法
26日前
大成建設株式会社
仮設屋根および仮設屋根の使用方法
19日前
リーフ株式会社
搬送アシスト装置
11日前
大成建設株式会社
土砂用消泡装置および土砂消泡方法
1か月前
大成建設株式会社
橋桁撤去用の仮設構造体と橋桁撤去装置
26日前
大成建設株式会社
コンクリート鋼管柱およびその構築方法
4日前
大成建設株式会社
掘進機の振動制御システムと振動制御方法
5日前
株式会社きんそく
3次元CAD装置の使用方法
1か月前
大成建設株式会社
針貫入試験システム、制御装置、及び針貫入試験方法
19日前
大成建設株式会社
マーカ粒子、振動試験方法、及びマーカ粒子の製造方法
22日前
大成建設株式会社
自走式揚重機用嵩上装置および自走式揚重機の嵩上方法
25日前
大成建設株式会社
変位計測用ターゲット及びトンネル坑内変位計測システム
26日前
大成建設株式会社
プレキャスト壁高欄およびプレキャスト壁高欄の接合構造
19日前
大成建設株式会社
プレキャスト壁高欄およびプレキャスト壁高欄の接合構造
19日前
大成建設株式会社
災害時現地調査支援システム及び災害時現地調査支援方法
1か月前
大成建設株式会社
水中作業機用の削孔装置、水中削孔方法および水中削岩方法
1か月前
株式会社コルラボ
情動判定システム及び情動判定プログラム
8日前
大成建設株式会社
場所打ちコンクリート杭および場所打ちコンクリート杭の施工方法
4日前
大成建設株式会社
床フレーム昇降システム、構造物の解体方法、および構造物の構築方法
19日前
大成建設株式会社
床フレーム昇降システム、構造物の構築方法、および構造物の解体方法
27日前
大成建設株式会社
短繊維補強コンクリート部材の製造方法および短繊維補強コンクリート部材
22日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ