TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024109337
公報種別
公開特許公報(A)
公開日
2024-08-14
出願番号
2023014075
出願日
2023-02-01
発明の名称
走行速度推定装置
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
G01S
13/60 20060101AFI20240806BHJP(測定;試験)
要約
【課題】移動体の走行速度の推定精度を向上させる。
【解決手段】車速推定装置4は、車両に搭載されてレーダ波を送受信するレーダ装置2から、レーダ波を反射した観測点とレーダ装置2との相対速度と、水平方位角とを含む観測点情報を繰り返し取得する。車速推定装置4は、複数の観測点情報の中から、真値に近い車両の車速を推定可能な観測点情報を選別する。車速推定装置4は、選別された1または複数の観測点情報の相対速度および水平方位角に基づいて、車速の真値を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体(VH)に搭載されてレーダ波を送受信するレーダ装置(2)から、少なくとも、前記レーダ波を反射した観測点と前記レーダ装置との相対速度である観測点相対速度と、前記観測点が存在する方位角である観測点方位角とを含む観測点情報を繰り返し取得するように構成された情報取得部(S10)と、
複数の前記観測点情報の中から、真値に近い前記移動体の走行速度を推定可能な前記観測点情報を選別するように構成された選別部(S70~S76)と、
前記選別部によって選別された1または複数の前記観測点情報の前記観測点相対速度および前記観測点方位角に基づいて、前記走行速度の前記真値を推定するように構成された推定部(S80~S90)と
を備える走行速度推定装置(4)。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の走行速度推定装置であって、
前記観測点が、静止している物体である静止物で前記レーダ波を反射した地点である静止観測点であるか否かを判断するように構成された静止物判断部(S30)を更に備え、
前記選別部は、前記静止物判断部が前記静止観測点であると判断した前記観測点情報の中から、前記真値に近い前記移動体の走行速度を推定可能な前記観測点情報を選別する走行速度推定装置。
【請求項3】
請求項1または請求項2に記載の走行速度推定装置であって、
前記選別部は、前記推定部が前記真値を推定する際に前記真値との誤差が大きくなる要因である誤差要因となる前記観測点情報を除外することによって、前記観測点情報を選別する走行速度推定装置。
【請求項4】
請求項3に記載の走行速度推定装置であって、
前記選別部(S70,S71)は、前記観測点方位角に起因した前記誤差要因である角度誤差要因となる前記観測点情報を除外する走行速度推定装置。
【請求項5】
請求項4に記載の走行速度推定装置であって、
前記選別部(S71)は、前記移動体の左側に位置する前記観測点の前記観測点情報の数と、前記移動体の右側に位置する前記観測点の前記観測点情報の数とが一致するように前記観測点情報を除外することにより、前記角度誤差要因となる前記観測点情報を除外する走行速度推定装置。
【請求項6】
請求項4に記載の走行速度推定装置であって、
前記観測点方位角は、前記移動体に対して水平方向に沿った方位角である水平方位角を含み、
前記選別部(S70)は、前記水平方位角が大きいことを示す予め設定された水平方位角除外条件を満たす前記水平方位角を含む前記観測点情報を除外することにより、前記角度誤差要因となる前記観測点情報を除外する走行速度推定装置。
【請求項7】
請求項1または請求項2に記載の走行速度推定装置であって、
前記選別部(S72,S73,S74)は、前記移動体の上方または下方に位置する前記観測点の前記観測点情報を除外する走行速度推定装置。
【請求項8】
請求項7に記載の走行速度推定装置であって、
前記観測点方位角は、前記移動体に対して垂直方向に沿った方位角である垂直方位角を含み、
前記選別部(S72)は、前記垂直方位角が大きいことを示す予め設定された垂直方位角除外条件を満たす前記垂直方位角を含む前記観測点情報を除外することにより、前記移動体の上方または下方に位置する前記観測点の前記観測点情報を除外する走行速度推定装置。
【請求項9】
請求項7に記載の走行速度推定装置であって、
前記観測点方位角は、前記移動体に対して水平方向に沿った方位角である水平方位角を含み、
前記選別部(S73)は、
複数の前記観測点情報のそれぞれを、前記観測点情報に含まれる前記観測点方位角に基づいて、複数の水平方位角範囲の何れか1つに分類し、
複数の前記水平方位角範囲のそれぞれについて、前記水平方位角範囲に属する1または複数の前記観測点情報の中から、前記観測点相対速度が最も大きい前記観測点情報以外、または、前記観測点と前記レーダ装置との間の距離である観測点距離が最も小さい前記観測点情報以外の前記観測点情報を除外することにより、前記移動体の上方または下方に位置する前記観測点の前記観測点情報を除外する走行速度推定装置。
【請求項10】
請求項7に記載の走行速度推定装置であって、
前記観測点情報は、前記観測点と前記レーダ装置との間の距離である観測点距離を含み、
前記選別部(S74)は、前記観測点距離が短いことを示す予め設定された距離除外条件を満たす前記観測点距離を含む前記観測点情報を除外することにより、前記移動体の上方または下方に位置する前記観測点の前記観測点情報を除外する走行速度推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の走行速度を推定する走行速度推定装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、静止物のドップラ周波数から自車速を算出するように構成されたミリ波レーダ装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2003-43139号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者の詳細な検討の結果、レーダ装置を搭載する移動体の走行速度を、静止物で反射してレーダ装置で受信されたレーダ波を用いて推定すると、走行速度の推定精度が低下することがあるという課題が見出された。
【0005】
本開示は、移動体の走行速度の推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様は、情報取得部(S10)と、選別部(S70~S76)と、推定部(S80~S90)とを備える走行速度推定装置(4)である。
情報取得部は、移動体(VH)に搭載されてレーダ波を送受信するレーダ装置(2)から、少なくとも、レーダ波を反射した観測点とレーダ装置との相対速度である観測点相対速度と、観測点が存在する方位角である観測点方位角とを含む観測点情報を繰り返し取得するように構成される。
【0007】
選別部は、複数の観測点情報の中から、真値に近い移動体の走行速度を推定可能な観測点情報を選別するように構成される。
推定部は、選別部によって選別された1または複数の観測点情報の観測点相対速度および観測点方位角に基づいて、走行速度の真値を推定するように構成される。
【0008】
このように構成された本開示の走行速度推定装置は、走行速度の推定において、真値から離れた走行速度が推定されてしまう観測点情報の寄与を低減することができ、移動体の走行速度の推定精度を向上させることができる。
【図面の簡単な説明】
【0009】
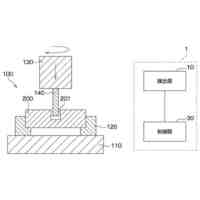
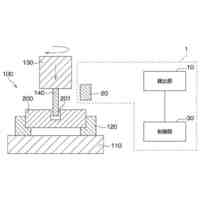
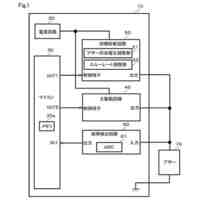
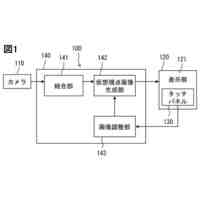
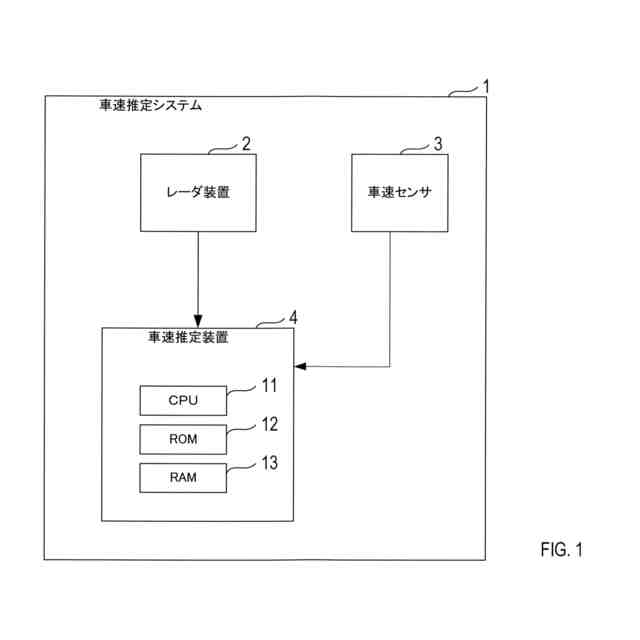
車速推定システムの構成を示すブロック図である。
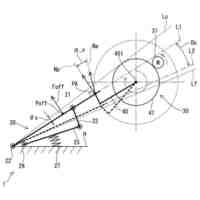
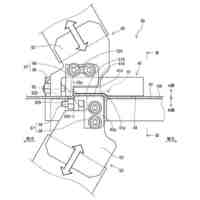
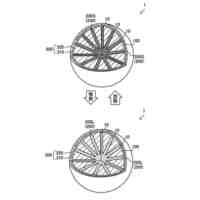
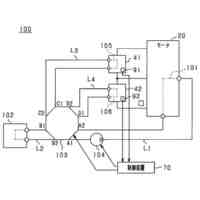
レーダ装置の設置位置と物体検出領域とを示す図である。
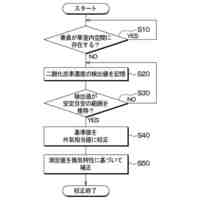
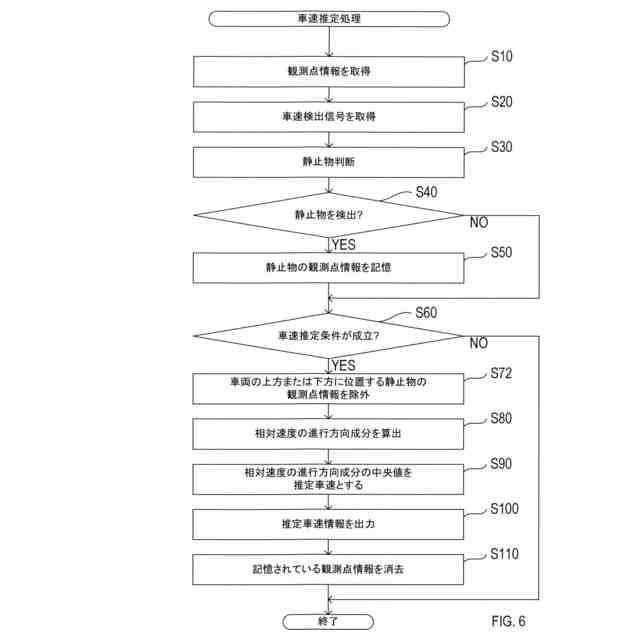
第1実施形態の車速推定処理を示すフローチャートである。
静止物であるか否かを判断する方法を説明する図である。
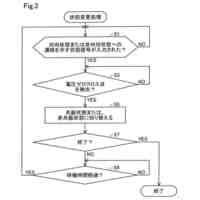
第2実施形態の車速推定処理を示すフローチャートである。
第3実施形態の車速推定処理を示すフローチャートである。
垂直方位角を示す図である。
第4実施形態の車速推定処理を示すフローチャートである。
水平方位角範囲を示す図である。
第5実施形態の車速推定処理を示すフローチャートである。
第6実施形態の車速推定処理を示すフローチャートである。
第7実施形態の車速推定処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
[第1実施形態]
以下に本開示の第1実施形態を図面とともに説明する。
本実施形態の車速推定システム1は、車両に搭載され、図1に示すように、レーダ装置2と、車速センサ3と、車速推定装置4とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
光学部材
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
アクセル装置
4日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
換気システム
1日前
株式会社デンソーエレクトロニクス
電流遮断装置
1日前
株式会社デンソー
移動体制御装置
1日前
株式会社デンソー
非接触給電装置
1日前
株式会社デンソー
車両用表示装置
1日前
株式会社デンソー
半導体メモリ装置
1日前
株式会社デンソー
空燃比センサ制御装置
1日前
株式会社デンソー
半導体装置の製造方法
7日前
株式会社デンソー
工具異常検出システム
今日
株式会社デンソー
半導体装置の製造方法
今日
株式会社デンソー
工具異常検出システム
今日
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソー
ブザー駆動回路の診断装置
7日前
株式会社デンソー
導体線の成形装置及び成形方法
今日
株式会社デンソー
処理装置、方法及びプログラム
4日前
株式会社豊田中央研究所
冷却液
4日前
株式会社デンソー
燃料電池システム、水素生成装置
1日前
株式会社デンソートリム
回転電機及び回転電機用ステータ
7日前
株式会社豊田中央研究所
蓄熱体
4日前
株式会社デンソー
車両用制御装置及び車両用制御方法
1日前
株式会社デンソー
車両用表示装置および画像表示方法
1日前
株式会社デンソー
無線通信システム及び無線通信方法
1日前
トヨタ自動車株式会社
電池パック
1日前
株式会社SOKEN
電池昇温装置
4日前
株式会社デンソー
熱輸送装置および半導体モジュール
今日
株式会社デンソー
車両用制御装置及び車両用制御方法
1日前
株式会社デンソー
炭化珪素半導体装置およびその製造方法
4日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ