TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024093370
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2022209700
出願日
2022-12-27
発明の名称
予測方法、表示方法、プログラム、予測システム、表示システム、及び学習済みモデル
出願人
オムロン株式会社
代理人
個人
,
個人
主分類
G06T
7/20 20170101AFI20240702BHJP(計算;計数)
要約
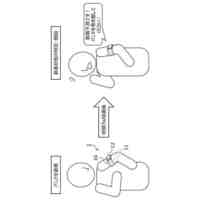
【課題】被写体の行動の予測の精度をより向上させることができる予測方法を提供する。
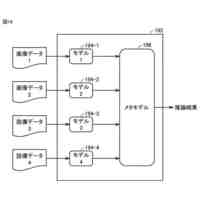
【解決手段】学習済みモデルは、空間を表す入力情報から得られる空間中の対象物を示す対象物情報に基づく複数の定量情報の入力に対して、対象物の行動についての第1予測結果と、複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習される。予測方法は、対象空間を表す対象入力情報から対象物の複数の定量情報を検出する。予測方法は、対象入力情報から検出された対象物の複数の定量情報を学習済みモデルに入力することによって、対象入力情報から検出された対象物の行動についての第1予測結果と、対象入力情報から検出された対象物の複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力する。
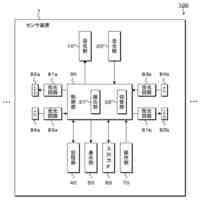
【選択図】図2
特許請求の範囲
【請求項1】
学習済みモデルを記憶する記憶装置にアクセス可能な演算回路によって実行される予測方法であって、
前記学習済みモデルは、空間を表す入力情報から得られる前記空間中の対象物を示す対象物情報に基づく複数の定量情報の入力に対して、前記対象物の行動についての第1予測結果と、前記複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習され、
前記予測方法は、
対象空間を表す対象入力情報から前記対象物の前記複数の定量情報を検出し、
前記対象入力情報から検出された前記対象物の前記複数の定量情報を前記学習済みモデルに入力することによって、前記対象入力情報から検出された前記対象物の行動についての前記第1予測結果と、前記対象入力情報から検出された前記対象物の前記複数の定量情報のうちの少なくとも一つについての前記第2予測結果と、を出力する、
予測方法。
続きを表示(約 1,600 文字)
【請求項2】
前記予測方法は、前記学習済みモデルから出力された前記第1予測結果と前記第2予測結果とを関連付けて記憶させる、請求項1に記載の予測方法。
【請求項3】
前記複数の定量情報は、前記対象物の位置又は移動に関する情報と、前記対象物の状態に関する情報とを含む、請求項1に記載の予測方法。
【請求項4】
前記複数の定量情報は、前記対象物の位置、前記対象物のバウンディングボックス、前記対象物の1又は複数の部位の位置、前記対象物の1又は複数の部位の向き、前記対象物の1又は複数の部位の画像、前記対象物の複数の部位の関連性に基づく情報、前記対象物の全体の画像、前記対象物の速度、及び前記対象物の軌跡のうちの少なくとも一つの情報を含む、請求項1に記載の予測方法。
【請求項5】
前記対象物の行動は、
前記対象物が前記対象空間を表す入力情報の中の他の物体を回避すること、
前記対象物が前記他の物体の通路を横断すること、
前記対象物が前記他の物体に接近すること、
前記対象物が前記他の物体に随行し、又は前記他の物体を追い抜くこと、
前記対象物が加速すること、
前記対象物が減速すること、
前記対象物が停止すること、又は停止中であること、
前記対象物が動き出すこと、及び
前記対象物が進行方向を変えること、
のうちの少なくとも一つを含む、
請求項1に記載の予測方法。
【請求項6】
前記第1予測結果は、前記対象物の行動が第1行動である確率と、前記対象物の行動が前記第1行動と異なる第2行動である確率とを含み、
前記第1行動及び第2行動は、それぞれ、
前記対象物が前記対象空間中の他の物体を回避すること、
前記対象物が前記他の物体の通路を横断すること、
前記対象物が前記他の物体に接近すること、
前記対象物が前記他の物体に随行し、又は前記他の物体を追い抜くこと、
前記対象物が加速すること、
前記対象物が減速すること、
前記対象物が停止すること、又は停止中であること、
前記対象物が動き出すこと、及び
前記対象物が進行方向を変えること、
のうちの少なくとも一つを含む、
請求項1に記載の予測方法。
【請求項7】
前記第1予測結果は、前記対象物の行動の危険の程度及び安全の程度のうちの少なくとも一方を示す指標を含む、請求項1に記載の予測方法。
【請求項8】
前記学習済みモデルは、
前記複数の定量情報から複数の特徴量を抽出する抽出処理と、
前記抽出処理で抽出された前記複数の特徴量から前記対象物の行動についての前記第1予測結果を決定する第1決定処理と、
前記抽出処理で抽出された前記複数の特徴量から前記複数の定量情報のうちの少なくとも一つについての前記第2予測結果を決定する第2決定処理と、
を実行する、
請求項1に記載の予測方法。
【請求項9】
請求項1~8のいずれかに記載の予測方法を演算回路に実行させるためのプログラム。
【請求項10】
空間を表す入力情報から得られる前記空間中の対象物を示す対象物情報に基づく複数の定量情報の入力に対して、前記対象物の行動についての第1予測結果と、前記複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習された学習済みモデルから前記第1予測結果と前記第2予測結果とを取得し、
前記第1予測結果を示す情報と、前記第2予測結果を可視化した情報とを表示装置に表示させる、
表示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、予測方法、表示方法、プログラム、予測システム、表示システム、及び学習済みモデルに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
非特許文献1は、ディープニューラルネットワークモデルを利用して歩行者の横断意図を予測するための技術を開示する。非特許文献1では、車両速度、歩行者のバウンディングボックス、及び、歩行者の姿勢のキーポイントから、非視覚ベースの特徴量を抽出し、画像の局所的なコンテキストと画像の全体的なコンテキストとから視覚ベースの特徴量を抽出し、非視覚ベースの特徴量と視覚ベースの特徴量を融合した特徴量により、歩行者の横断意図を予測する。
【先行技術文献】
【非特許文献】
【0003】
Dongfang Yang,他4名,”Predicting Pedestrian Crossing Intention with Feature Fusion and Spatio-Temporal Attention”,[online],2021年4月12日,[2022年11月21日検索],Cornell University,インターネット<URL:https://arxiv.org/abs/2104.05485>
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に開示された技術は、車両速度、歩行者のバウンディングボックス、歩行者の姿勢のキーポイント、画像の局所的なコンテキスト、及び、画像の全体的なコンテキスト等の情報を用いることで、歩行者の横断意図を予測し得る。
【0005】
本開示は、被写体の行動についての予測の精度をより向上させることができる予測方法、表示方法、プログラム、予測システム、表示システム、及び学習済みモデルを提供する。
【課題を解決するための手段】
【0006】
本開示の一態様に係る予測方法は、学習済みモデルを記憶する記憶装置にアクセス可能な演算回路によって実行される予測方法であって、
前記学習済みモデルは、空間を表す入力情報から得られる前記空間中の対象物を示す対象物情報に基づく複数の定量情報の入力に対して、前記対象物の行動についての第1予測結果と、前記複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習され、
前記予測方法は、
対象空間を表す対象入力情報から前記対象物の前記複数の定量情報を検出し、
前記対象入力情報から検出された前記対象物の前記複数の定量情報を前記学習済みモデルに入力することによって、前記対象入力情報から検出された前記対象物の行動についての前記第1予測結果と、前記対象入力情報から検出された前記対象物の前記複数の定量情報のうちの少なくとも一つについての前記第2予測結果と、を出力する。
【0007】
本開示の一態様に係るプログラムは、上記の予測方法を演算回路に実行させるためのプログラムである。
【0008】
本開示の一態様に係る表示方法は、
空間を表す入力情報から得られる前記空間中の対象物を示す対象物情報に基づく複数の定量情報の入力に対して、前記対象物の行動についての第1予測結果と、前記複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習された学習済みモデルから前記第1予測結果と前記第2予測結果とを取得し、
前記第1予測結果を示す情報と、前記第2予測結果を可視化した情報とを表示装置に表示させる。
【0009】
本開示の一態様に係るプログラムは、上記の表示方法を演算回路に実行させるためのプログラムである。
【0010】
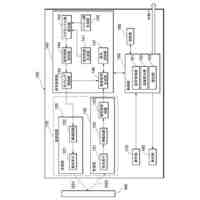
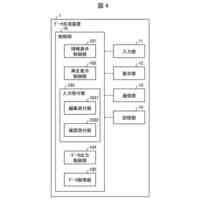
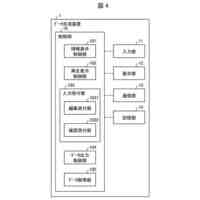
本開示の一態様に係る予測システムは、
学習済みモデルを記憶する記憶装置と、
空間を表す入力情報から得られる前記空間中の対象物を示す対象物情報を生成する生成装置と、
前記生成装置及び前記記憶装置にアクセス可能な演算回路と、
を備え、
前記学習済みモデルは、前記対象物情報に基づく複数の定量情報の入力に対して、前記対象物の行動についての第1予測結果と、前記複数の定量情報のうちの少なくとも一つについての第2予測結果と、を出力するように学習され、
前記演算回路は、
対象空間を表す対象入力情報から前記対象物の前記複数の定量情報を検出し、
前記対象入力情報から検出された前記対象物の前記複数の定量情報を前記学習済みモデルに入力することによって、前記対象入力情報から検出された前記対象物の行動についての前記第1予測結果と、前記対象入力情報から検出された前記対象物の前記複数の定量情報のうちの少なくとも一つについての前記第2予測結果と、を出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
光センサ
17日前
オムロン株式会社
保護装置
18日前
オムロン株式会社
表示装置
17日前
オムロン株式会社
近接センサ
18日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
光電センサ
18日前
オムロン株式会社
電力変換装置
今日
オムロン株式会社
作業指示装置
18日前
オムロン株式会社
認証中継サーバ
今日
オムロン株式会社
充放電システム
8日前
オムロン株式会社
充放電システム
8日前
オムロン株式会社
トリガスイッチ
18日前
オムロン株式会社
生体信号計測装置
18日前
オムロン株式会社
自律作業システム
18日前
オムロン株式会社
生体信号計測装置
18日前
オムロン株式会社
生体信号計測装置
18日前
オムロン株式会社
センサ及び検出方法
18日前
オムロン株式会社
電力変換装置及び制御装置
18日前
オムロン株式会社
方法、プログラムおよび装置
18日前
オムロン株式会社
位置計測装置、位置計測方法
18日前
オムロン株式会社
ポール、及び、充放電システム
8日前
オムロン株式会社
ポール、及び、充放電システム
8日前
オムロン株式会社
ポール、及び、充放電システム
8日前
オムロン株式会社
センサシステム及びセンサ装置
18日前
オムロン株式会社
処理装置、監視方法及びプログラム
18日前
オムロン株式会社
情報処理装置及び位置計測システム
18日前
オムロン株式会社
情報処理装置、プログラム及び方法
18日前
オムロン株式会社
制御装置、制御方法及びプログラム
18日前
オムロン株式会社
サーボドライバ及びサーボシステム
18日前
オムロン株式会社
コントローラ及びロボットの制御方法
18日前
オムロン株式会社
制御装置、制御方法およびプログラム
18日前
オムロン株式会社
データ生成装置およびデータ生成方法
18日前
オムロン株式会社
データ生成装置およびデータ生成方法
18日前
オムロン株式会社
電源バスの管理方法及びサーボシステム
18日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ