TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024084021
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022198178
出願日
2022-12-12
発明の名称
情報処理装置、制御システム、探索方法、および探索プログラム
出願人
日立造船株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05B
23/02 20060101AFI20240617BHJP(制御;調整)
要約
【課題】個人の技能に左右されずに推論や制御に関するパラメータを適切に設定する。
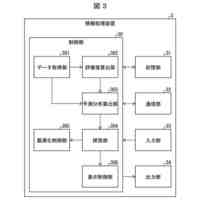
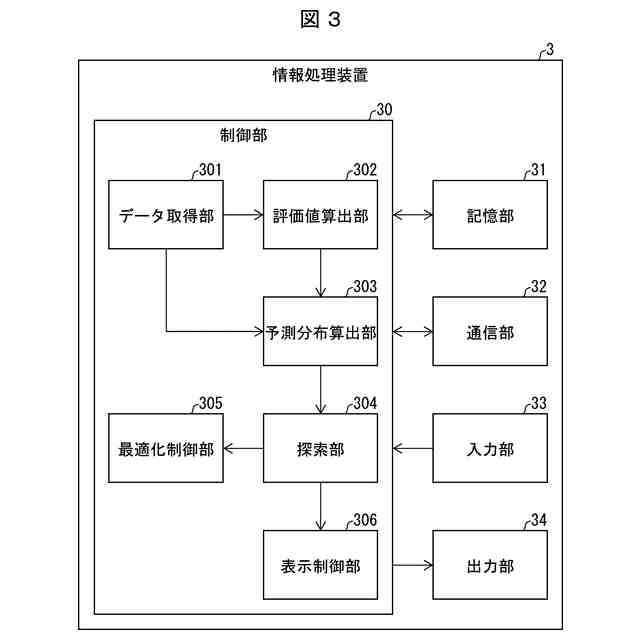
【解決手段】情報処理装置(3)は、推論モデルによる推論の結果に応じて制御対象(5)に対する制御を行う制御システム(7)におけるパラメータと、当該パラメータが適用されている期間の制御対象(5)の稼働状態との関係を示す関数の予測分布を算出する予測分布算出部(303)と、当該予測分布に基づいて上記パラメータの最適値の候補を探索する探索部(304)と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおける当該推論および当該制御の少なくとも何れかに関するパラメータと、当該パラメータが適用されている期間における前記制御対象の稼働状態との関係を示す関数の予測分布を算出する予測分布算出部と、
前記予測分布に基づいて前記パラメータの最適値の候補を探索する探索部と、を備える情報処理装置。
続きを表示(約 1,300 文字)
【請求項2】
前記パラメータは、前記推論の結果に応じた、前記制御対象に対する制御の内容と制御量とを示すものである、請求項1に記載の情報処理装置。
【請求項3】
前記パラメータには、前記推論モデルによる推論に用いられる推論用パラメータが含まれており、
前記探索部は、前記予測分布に基づいて、前記制御対象に対する制御の内容と制御量の最適値の候補と、前記推論用パラメータの最適値の候補の両方を探索する、請求項2に記載の情報処理装置。
【請求項4】
前記推論モデルは、前記制御対象の将来の稼働状態を示す値を予測するものであり、
前記パラメータは、前記制御対象の将来の稼働状態が正常であるか否かを判定するための閾値である、請求項1に記載の情報処理装置。
【請求項5】
前記推論モデルは、前記制御対象の将来の稼働状態を示す値を予測するものであり、
前記予測分布算出部は、前記制御対象の稼働状態を示す情報として、前記制御対象の稼働時間に対する、前記制御対象の稼働状態が異常であった時間の比を用いる、請求項1から4の何れか1項に記載の情報処理装置。
【請求項6】
前記予測分布算出部は、前記探索部が検出した前記候補と、当該候補が適用されている期間における前記制御対象の稼働状態とに基づいて前記予測分布を更新し、
前記探索部は、更新後の前記予測分布に基づいて前記パラメータの最適値の新たな候補を探索する、請求項1から4の何れか1項に記載の情報処理装置。
【請求項7】
前記探索部による各探索で検出された前記候補の値の遷移を示す遷移情報を表示する表示制御部を備える、請求項6に記載の情報処理装置。
【請求項8】
前記表示制御部は、前記候補を適用して前記制御対象の制御を行った後の前記制御対象の稼働状態に応じて前記遷移情報に含まれる各候補の値の表示態様を異ならせる、請求項7に記載の情報処理装置。
【請求項9】
請求項1に記載の情報処理装置と、
前記情報処理装置が検出する前記パラメータの最適値の候補を適用して前記制御対象に対する制御を行う制御装置と、を含み、
前記情報処理装置は、前記候補が適用されている期間における前記稼働状態を示す結果データを取得し、当該結果データに基づいて前記予測分布を更新すると共に、更新後の予測分布に基づいて前記パラメータの最適値の新たな候補を探索する、制御システム。
【請求項10】
少なくとも1つの情報処理装置が実行する探索方法であって、
推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおける当該推論および当該制御の少なくとも何れかに関するパラメータと、当該パラメータが適用されている期間における前記制御対象の稼働状態との関係を示す関数の予測分布を算出するステップと、
前記予測分布に基づいて前記パラメータの最適値の候補を探索するステップと、を含む探索方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおけるパラメータの設定に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
機械学習モデルにより推論を行い、その推論の結果に基づいて制御対象を制御する技術が従来から知られている。例えば、下記の特許文献1には、ごみの焼却を行うと共に、焼却時に発生する熱を利用して発電を行うごみ焼却プラント設備において、機械学習したニューラルネットワークモデルを用いて所定時間後の発生蒸気量を予測し、その予測結果に基づいて運転制御を行うことが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2005-249349号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のような従来技術では、例えば、発生蒸気量の低下が予測された場合に行われる、発生蒸気量の低下を回避するための運転制御の内容についてはオペレータが判断する必要がある。このため、発生蒸気量の低下を避けることができるか否かが、オペレータの運転技術等の個人の技能に左右されるという問題がある。
【0005】
また、ごみ焼却プラント設備を稼働させている期間中は、その制御システムも常に稼働させておく必要があり、その制御システムの制御内容はごみ焼却プラント設備の稼働状態に直接的な影響を与える。このため、幾度もトライアンドエラーを繰り返し、その結果に基づいて適切な運転制御の内容を自動で決定するような構成を採用することは難しく、上記のとおり個人の技能に頼らざるを得なかった。
【0006】
このような問題は、プラントで使用される制御システムに限られず、任意の推論モデルによる推論の結果に応じて任意の制御対象に対する制御を行う制御システムにおいて共通して生じる問題である。また、このような問題は、運転制御の内容を決定する場合に限られず、推論や制御に関する様々なパラメータの設定において共通して生じる問題点である。
【0007】
本発明の一態様は、推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおいて、個人の技能に左右されることなく、推論や制御に関するパラメータを適切に設定することを可能にする情報処理装置等を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明の一態様に係る情報処理装置は、推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおける当該推論および当該制御の少なくとも何れかに関するパラメータと、当該パラメータが適用されている期間における前記制御対象の稼働状態との関係を示す関数の予測分布を算出する予測分布算出部と、前記予測分布に基づいて前記パラメータの最適値の候補を探索する探索部と、を備える。
【0009】
また、本発明の一態様に係る探索方法は、少なくとも1つの情報処理装置が実行する探索方法であって、推論モデルによる推論の結果に応じて所定の制御対象に対する制御を行う制御システムにおける当該推論および当該制御の少なくとも何れかに関するパラメータと、当該パラメータが適用されている期間における前記制御対象の稼働状態との関係を示す関数の予測分布を算出するステップと、前記予測分布に基づいて前記パラメータの最適値の候補を探索するステップと、を含む。
【発明の効果】
【0010】
本発明の一態様によれば、個人の技能に左右されることなく、推論や制御に関するパラメータを適切に設定することが可能になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立造船株式会社
仮締切構造体
16日前
日立造船株式会社
位置特定装置、及び位置特定方法
23日前
日立造船株式会社
カメラ、列車、および監視システム
29日前
日立造船株式会社
排ガス処理装置および排ガス処理方法
26日前
日立造船株式会社
制御システム、送信装置、制御装置および制御方法
22日前
日立造船株式会社
情報処理装置、制御システム、探索方法、および探索プログラム
5日前
日立造船株式会社
情報処理装置、情報処理方法、情報処理プログラムおよびろ過システム
1か月前
日立造船株式会社
情報処理装置、制御システム、指標値算出方法、および指標値算出プログラム
5日前
エイブリック株式会社
基準電流源
19日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
岩田工機株式会社
加工装置
1か月前
マキノジェイ株式会社
工作機械
18日前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
過電流検出回路
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
オムロン株式会社
サポート装置およびサポート方法
18日前
村田機械株式会社
無人搬送車システム
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
26日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
16日前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
18日前
シャープ株式会社
走行システム及び走行方法
1か月前
オークマ株式会社
工作機械の制御方法及び制御装置
4日前
多摩川精機株式会社
突入電流防止回路
2か月前
ローム株式会社
リニアレギュレータ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ