TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024081947
公報種別
公開特許公報(A)
公開日
2024-06-19
出願番号
2022195554
出願日
2022-12-07
発明の名称
ロボット
出願人
株式会社IHI
代理人
弁理士法人青海国際特許事務所
主分類
B25J
15/08 20060101AFI20240612BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物体の表面性状にかかわらず安定的に対象物を把持することができる、ロボットを提供すること。
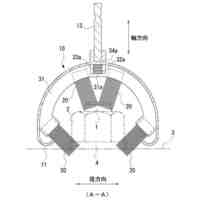
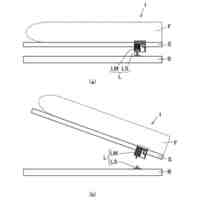
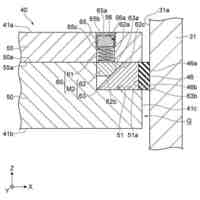
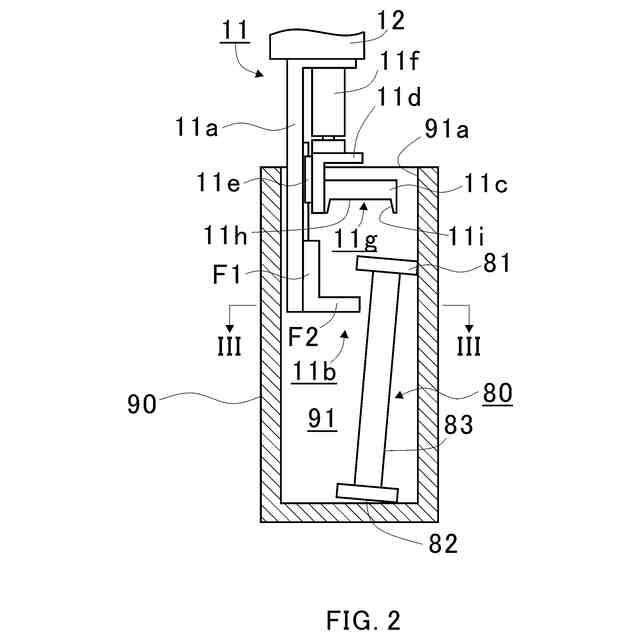
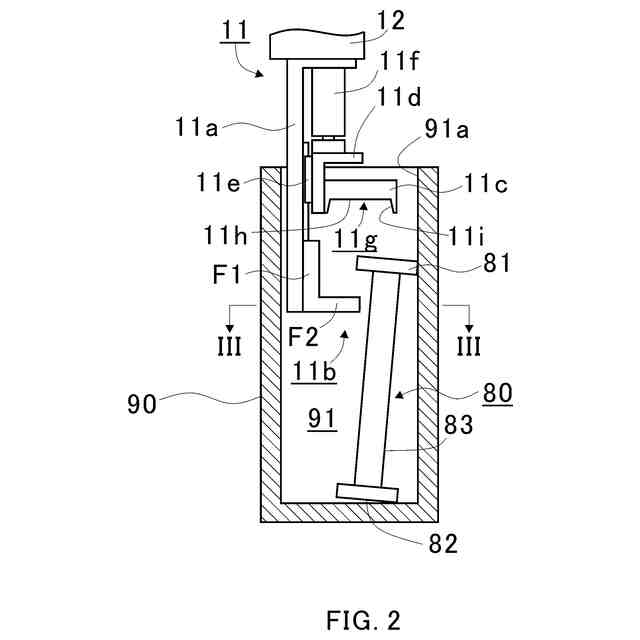
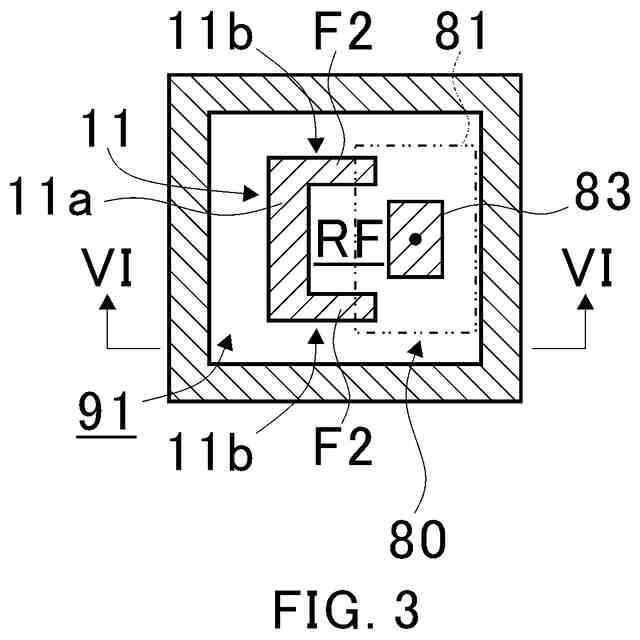
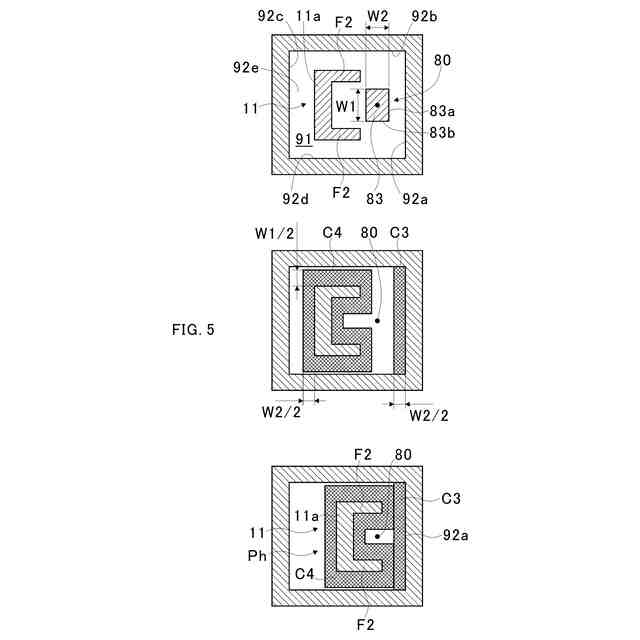
【解決手段】ロボット10は、互いに離間して配置される一対のフィンガF2と、パッド11cと、一対のフィンガF2に対してパッド11cを相対的に移動させるアクチュエータ11fと、ロボット10の制御装置であって、当該制御装置は、一対のフィンガF2が対象物80の第1部位83を挟んで互いに対向するように、対象物80に対して一対のフィンガF2を移動させることと、対象物80に対して一対のフィンガF2を移動させた後に、パッド11cを対象物80の第2部位81に押し当てて、一対のフィンガF2およびパッド11cが対象物80を脱出不能に囲うようにケージングを成立させるよう、アクチュエータ11fを制御することと、を実行するように構成される、制御装置と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
互いに離間して配置される一対のフィンガと、
パッドと、
前記一対のフィンガに対して前記パッドを相対的に移動させるアクチュエータと、
ロボットの制御装置であって、
当該制御装置は、
前記一対のフィンガが対象物の第1部位を挟んで互いに対向するように、前記対象物に対して前記一対のフィンガを移動させることと、
前記対象物に対して前記一対のフィンガを移動させた後に、前記パッドを前記対象物の第2部位に押し当てて、前記一対のフィンガおよび前記パッドが前記対象物を脱出不能に囲うようにケージングを成立させるよう、前記アクチュエータを制御することと、
を実行するように構成される、
制御装置と、
を備える、ロボット。
続きを表示(約 940 文字)
【請求項2】
前記対象物は、開口を有する箱に収容され、
前記制御装置は、
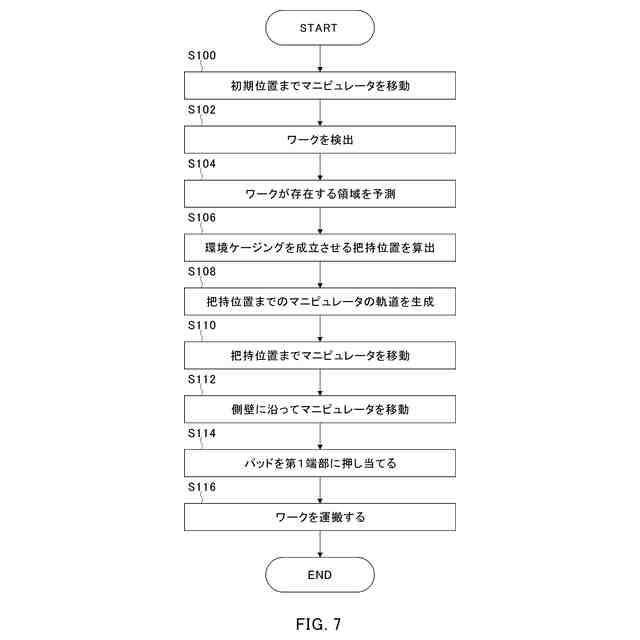
前記一対のフィンガが前記対象物の前記第1部位を挟んで互いに対向し、かつ、前記一対のフィンガおよび前記箱の壁が前記対象物を脱出不能に囲い込むように環境ケージングを成立させるよう、前記対象物に対して前記一対のフィンガを移動させることと、
前記環境ケージングが成立された後に、前記一対のフィンガを前記壁に沿って移動させることと、
前記壁の前記開口における端部において前記環境ケージングが解除される時点で、前記パッドを前記対象物の前記第2部位に押し当てて、前記一対のフィンガおよび前記パッドによる前記対象物の前記ケージングを成立させるよう、前記アクチュエータを制御することと、
を実行するように構成される、
請求項1に記載のロボット。
【請求項3】
前記パッドは、前記対象物の前記第2部位に押し当てられる接触部と、前記接触部に前記第2部位を誘導するテーパ形状を有する誘導部と、を含む、窪みを有する、請求項1または2に記載のロボット。
【請求項4】
前記対象物は、
第1端部と、
前記第1端部の反対側の第2端部と、
前記第1端部および前記第2端部の間に位置し、かつ、前記第1端部よりも細いネック部と、
を含み、
前記一対のフィンガは、前記対象物の前記ネック部を挟んで互いに対向するように移動され、
前記パッドの前記接触部は、前記対象物の前記第1端部に対応する形状を有する、
請求項3に記載のロボット。
【請求項5】
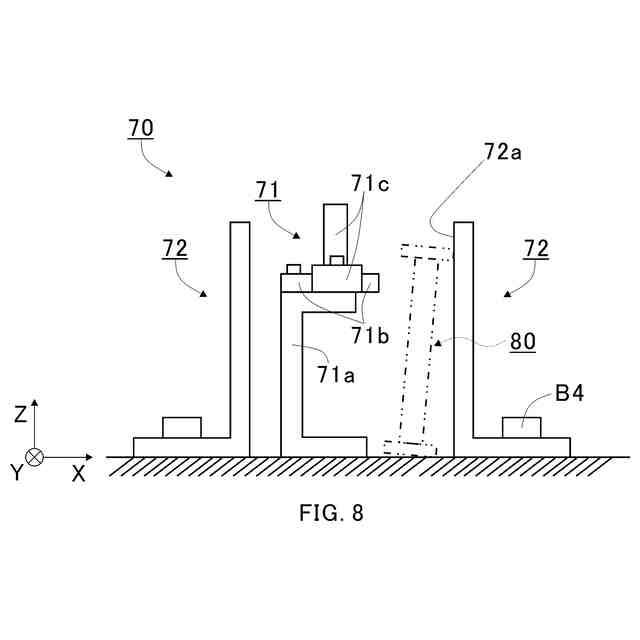
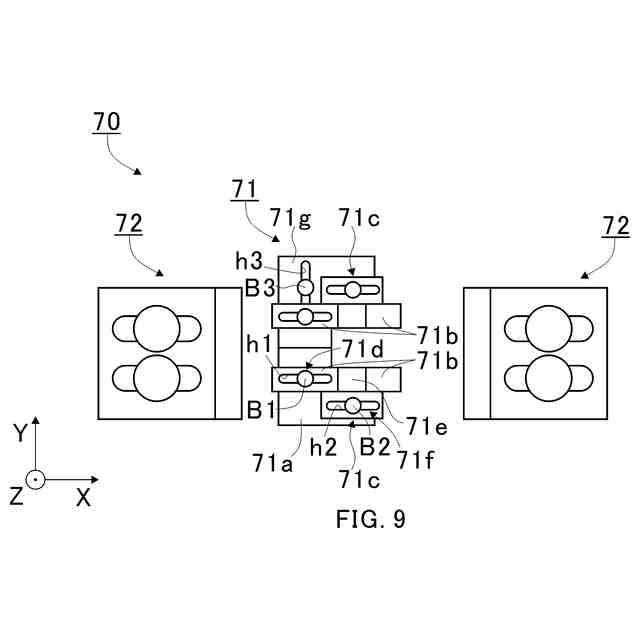
請求項2に記載の前記ロボットに含まれる前記一対のフィンガを設計するための治具セットであって、
前記一対のフィンガに対応する一対の模擬フィンガと、前記一対の模擬フィンガを支持するベースと、前記一対の模擬フィンガの間の間隔を調整する第1調整部と、前記ベースからの前記模擬フィンガの突出し長さを調整する第2調整部と、を含む、第1治具と、
前記箱の前記壁に対応する模擬壁を含む、第2治具と、
を備える、治具セット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットは、マニピュレータの制御に力制御を使用する場合がある。例えば、特許文献1は、切削または研磨等の機械加工に使用可能なエンドエフェクタを備えるロボットを開示する。このロボットは、エンドエフェクタの制御に力制御および位置制御の双方を使用する。特許文献1のロボットでは、エンドエフェクタを目標の軌道に沿って移動させるように位置制御が使用される。また、エンドエフェクタが目標力で対象物に接触するように力制御が使用される。
【0003】
また、例えば、特許文献2は、部品またはツール等のワークを把持するロボットアームを備える、ロボットを開示する。このロボットは、ロボットアームの制御に、力制御としてインピーダンス制御を使用する。特許文献2のロボット制御装置では、ロボットアームの手先の速度が第1速度である場合には、インピーダンス制御の粘性パラメータが第1粘性値に調整される。ロボットアームの手先の速度が第1速度よりも遅い第2速度である場合には、粘性パラメータが第1粘性値よりも高い第2粘性値に調整される。
【先行技術文献】
【特許文献】
【0004】
特開2018-089747号公報
特開2019-214105号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットのマニピュレータは、様々な作業に使用される。例えば、マニピュレータは、物体の把持に使用される。例えば、マニピュレータが、物体とマニピュレータとの間の摩擦によって物体を把持する場合、摩擦係数は、物体の表面性状に応じて変化する。しかしながら、物体毎に摩擦係数を得ることは困難である。したがって、この場合、把持力は、安全率を考慮して大きな値に設定され得る。しかしながら、安全率は、経験およびノウハウに基づいて決定されがちである。
【0006】
本開示は、物体の表面性状にかかわらず安定的に対象物を把持することができる、ロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様に係るロボットは、互いに離間して配置される一対のフィンガと、パッドと、一対のフィンガに対してパッドを相対的に移動させるアクチュエータと、ロボットの制御装置であって、当該制御装置は、一対のフィンガが対象物の第1部位を挟んで互いに対向するように、対象物に対して一対のフィンガを移動させることと、対象物に対して一対のフィンガを移動させた後に、パッドを対象物の第2部位に押し当てて、一対のフィンガおよびパッドが対象物を脱出不能に囲うようにケージングを成立させるよう、アクチュエータを制御することと、を実行するように構成される、制御装置と、を備える。
【0008】
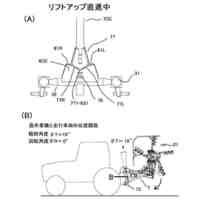
対象物は、開口を有する箱に収容されてもよく、制御装置は、一対のフィンガが対象物の第1部位を挟んで互いに対向し、かつ、一対のフィンガおよび箱の壁が対象物を脱出不能に囲い込むように環境ケージングを成立させるよう、対象物に対して一対のフィンガを移動させることと、環境ケージングが成立された後に、一対のフィンガを壁に沿って移動させることと、壁の開口における端部において環境ケージングが解除される時点で、パッドを対象物の第2部位に押し当てて、一対のフィンガおよびパッドによる対象物のケージングを成立させるよう、アクチュエータを制御することと、を実行するように構成されてもよい。
【0009】
パッドは、対象物の第2部位に押し当てられる接触部と、接触部に第2部位を誘導するテーパ形状を有する誘導部と、を含む窪みを有してもよい。
【0010】
対象物は、第1端部と、第1端部の反対側の第2端部と、第1端部および第2端部の間に位置し、かつ、第1端部よりも細いネック部と、を含んでもよく、一対のフィンガは、対象物のネック部を挟んで互いに対向するように移動されてもよく、パッドの接触部は、対象物の第1端部に対応する形状を有してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社IHIインフラシステム
塗装具
2か月前
株式会社IHI
ロボット
10日前
株式会社IHIインフラ建設
研修施設
3日前
株式会社IHIアグリテック
農作業機
2か月前
株式会社IHI
ロボット
10日前
株式会社IHI検査計測
表面処理装置
19日前
株式会社IHI
X線検査装置
1か月前
株式会社IHIエアロスペース
飛翔体発射機
1か月前
株式会社IHI
動体検知装置
1か月前
株式会社IHI
燃焼システム
1か月前
株式会社IHI建材工業
ネジ締結方法
4日前
株式会社IHI
水流発電装置
2か月前
株式会社IHIエアロスペース
レーザ点火装置
16日前
株式会社IHIアグリテック
農業用トレーラ
1か月前
株式会社IHIインフラシステム
橋梁用常設足場
2か月前
株式会社IHIアグリテック
農業用トレーラ
1か月前
株式会社IHI
ワーク支持システム
9日前
株式会社IHI
ガスタービンシステム
1か月前
株式会社IHI
加工装置および加工方法
2か月前
株式会社IHI
昇降装置及び積層造形装置
1か月前
株式会社IHI
造形方法及びサポート部材
1か月前
株式会社IHI
積層造形装置及び積層造形方法
2か月前
株式会社IHI建材工業
セメント組成物及びその製造方法
4日前
株式会社IHIエアロスペース
飛翔体発射装置及び飛翔体発射方法
1か月前
株式会社IHI
位置推定システム及び位置推定方法
2か月前
株式会社IHI
積層造形装置及び積層造形プログラム
2か月前
株式会社IHIエアロスペース
推進薬供給装置とこれを備えた宇宙飛行体
2日前
株式会社IHI建材工業
トンネル用プレキャスト版とその据付方法
2日前
株式会社IHI
循環型水耕栽培装置及び循環型水耕栽培方法
1か月前
北海道電力株式会社
散気体及びその製造方法
2か月前
株式会社IHI検査計測
FBGセンサ固定治具及びFBGセンサ固定方法
2か月前
株式会社IHI
非接触給電設備、非接触給電方法及び対応付け装置
1か月前
株式会社IHI
流体機械
1か月前
株式会社IHIエアロスペース
圧電FRPセンサーとこれを用いたクラック検出システムと方法
9日前
サムテック株式会社
締結構造、ロケット、および、円筒部材の製造方法
19日前
株式会社IHI
エネルギー予測装置、エネルギー予測方法およびエネルギー予測プログラム
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ