TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024075329
公報種別
公開特許公報(A)
公開日
2024-06-03
出願番号
2022186707
出願日
2022-11-22
発明の名称
軌道生成装置及び塗布システム
出願人
株式会社デンソー
,
国立大学法人金沢大学
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20240527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】流動体吐出部から吐出される流動体が流動体吐出部から対象物の表面まで繋がった状態を維持する程度の粘性を有していても、流動体を目標塗布軌跡に沿って対象物の表面に塗布すること。
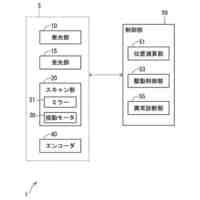
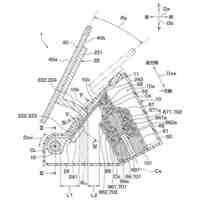
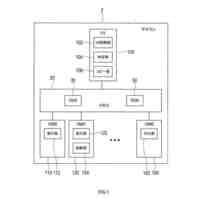
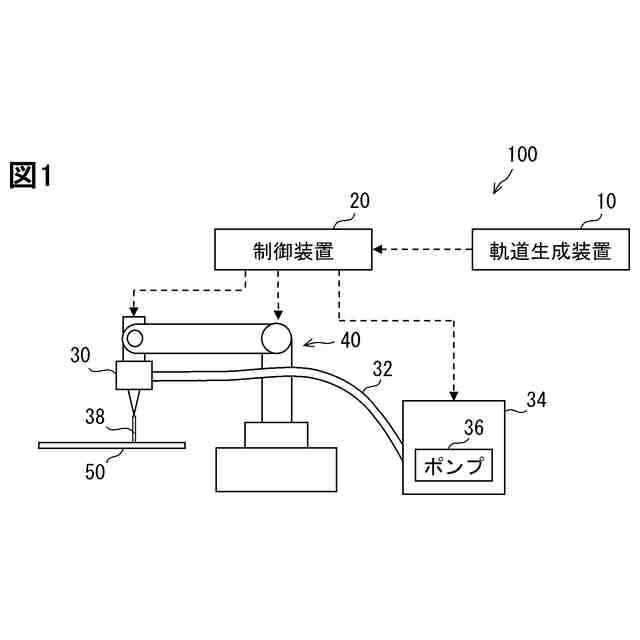
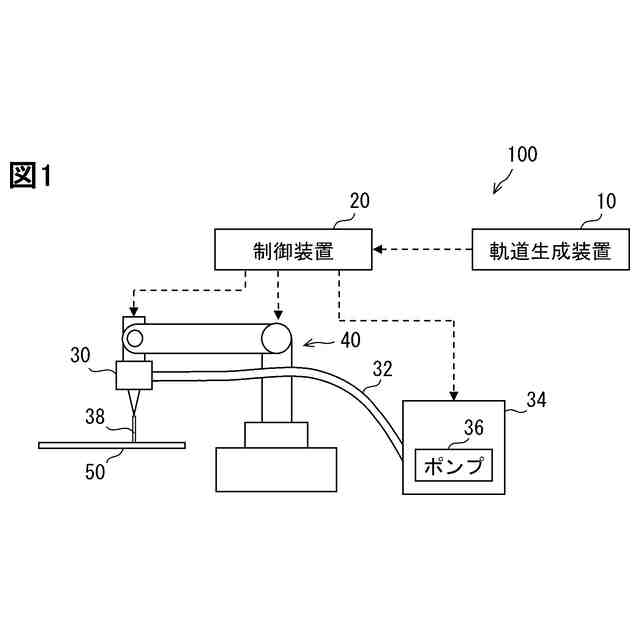
【解決手段】軌道生成装置10は、時系列モデルを用いて、目標塗布軌跡に対応する塗布ノズル30の軌道を生成する。時系列モデルは、塗布ノズル30の実際の軌道と、流動体38の実際の塗布軌跡とに基づいて学習されたものであり、流動体38の粘性による挙動を考慮して塗布ノズル30の軌道と流動体38の塗布軌跡との関係を示すものである。従って、学習された時系列モデルを用いることによって、目標塗布軌跡に沿って流動体38を塗布することが可能な塗布ノズル38の軌道を生成することができる。
【選択図】図1
特許請求の範囲
【請求項1】
流動体(38)を目標塗布軌跡に沿って対象物(50)の表面に塗布するための、前記流動体を吐出する流動体吐出部(30)の軌道を生成する軌道生成装置であって、
前記流動体吐出部が吐出する前記流動体は、前記流動体吐出部から前記対象物の表面まで繋がった状態を維持する粘性を有し、
前記流動体吐出部の実際の軌道と、前記流動体の実際の塗布軌跡とに基づいて学習された、前記流動体の粘性による挙動を考慮して前記流動体吐出部の軌道と前記流動体の塗布軌跡との関係を示す時系列モデルを記憶する記憶部(12、112)と、
前記目標塗布軌跡が与えられると、前記時系列モデルを用いて、前記目標塗布軌跡に対応する前記流動体吐出部の軌道を生成する軌道生成部(14、15、114)と、を備える軌道生成装置。
続きを表示(約 2,000 文字)
【請求項2】
前記時系列モデルは、少なくとも、前記流動体吐出部の予定軌道を代表する複数の予定軌道位置と、前記対象物の表面に塗布された前記流動体の塗布軌跡を代表する複数の塗布軌跡位置とから、前記流動体吐出部から吐出された前記流動体が前記対象物の表面に塗布される塗布位置を推定するものである、請求項1に記載の軌道生成装置。
【請求項3】
前記軌道生成部は、
前記目標塗布軌跡が与えられると、前記目標塗布軌跡に相当する前記流動体吐出部の軌道を定める軌道設定部(14、S210)と、
前記複数の予定軌道位置及び前記複数の塗布軌跡位置を、前記軌道設定部によって定められた前記流動体吐出部の軌道及び前記対象物の表面に塗布された前記流動体の塗布軌跡に沿って更新しつつ、前記時系列モデルによる前記流動体の塗布位置の推定を繰り返すことによって、前記流動体吐出部を前記軌道設定部によって定められた軌道に沿って移動させたときに得られる前記流動体の塗布軌跡を予測する塗布軌跡予測部(15、S220)と、
前記塗布軌跡予測部によって予測された予測塗布軌跡と前記目標塗布軌跡との差異が所定の許容範囲を超えている場合、前記差異が小さくなるように前記流動体吐出部の軌道を修正する軌道修正部(14、S240)と、
前記予測塗布軌跡と前記目標塗布軌跡との差異が所定の許容範囲に収まった場合、前記予測塗布軌跡を求める際に用いた前記流動体吐出部の軌道を、前記目標塗布軌跡に対応する前記流動体吐出部の軌道として出力する軌道出力部(14、S250)と、を備える請求項2に記載の軌道生成装置。
【請求項4】
前記時系列モデルは、少なくとも、前記対象物の表面に塗布された前記流動体の塗布軌跡に続いて、前記流動体が塗布されるべき前記目標塗布軌跡を代表する複数の塗布軌跡位置と、前記流動体吐出部の過去の軌道を代表する複数の過去軌道位置とから、前記流動体吐出部が移動すべき位置を推定するものである、請求項1に記載の軌道生成装置。
【請求項5】
前記軌道生成部は、前記複数の塗布軌跡位置及び前記複数の過去軌道位置を、前記目標塗布軌跡及び前記流動体吐出部の過去の軌道に沿って更新しつつ、前記時系列モデルによる前記流動体吐出部が移動すべき位置の推定を繰り返すことによって、前記目標塗布軌跡に対応する前記流動体吐出部の軌道を予測し、予測した軌道を出力する軌道出力部(S410、S420)を備える、請求項4に記載の軌道生成装置。
【請求項6】
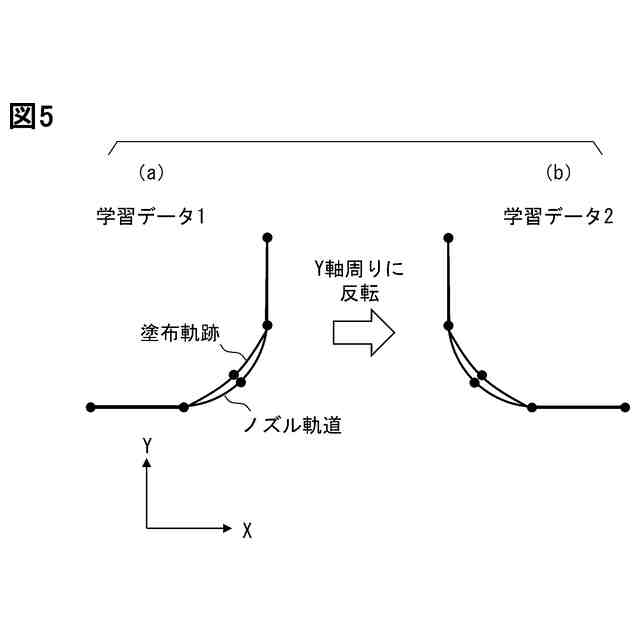
前記時系列モデルは、前記流動体の塗布軌跡が所定のパターン形状となるように、前記流動体吐出部から前記流動体を吐出しつつ前記流動体吐出部を移動させたときの前記流動体吐出部の軌道と、実際に得られた前記流動体の塗布軌跡を学習データとして学習されるものであり、
前記学習データは、前記流動体吐出部を移動させたときの前記流動体吐出部の軌道と、実際に得られた前記流動体の塗布軌跡に対して、反転、回転、縮小、拡大の少なくとも1つの数学的処理により水増しされる、請求項1乃至5のいずれか1項に記載の軌道生成装置。
【請求項7】
前記時系列モデルは、前記流動体の塗布軌跡が所定のパターン形状となるように、前記流動体吐出部から前記流動体を吐出しつつ前記流動体吐出部を移動させたときの前記流動体吐出部の軌道と、実際に得られた前記流動体の塗布軌跡を学習データとして学習されるものであり、
前記学習データは、前記流動体吐出部の位置又は前記流動体の塗布位置を原点とする2次元座標における位置に変換され、前記原点は、前記時系列モデルによって位置の推定が繰り返される毎に更新される、請求項1乃至5のいずれか1項に記載の軌道生成装置。
【請求項8】
前記2次元座標の一方の軸の向きは、前記流動体吐出部の位置の移動方向又は前記流動体の塗布位置の移動方向に揃えられる、請求項7に記載の軌道生成装置。
【請求項9】
前記軌道生成部によって生成された前記目標塗布軌跡に対応する前記流動体吐出部の軌道に従って、前記流動体吐出部を移動させたときの実際の前記流動体の塗布軌跡を検出する検出部(20、S320)と、
前記検出部によって検出された実際の塗布軌跡と、前記流動体吐出部の軌道を学習データとして、所定の更新条件が満たされたときに前記時系列モデルの更新を指示する更新指示部(S340)と、を備える請求項1乃至5のいずれか1項に記載の軌道生成装置。
【請求項10】
請求項1乃至5のいずれか1項に記載の軌道生成装置(10、110)と、
前記流動体吐出部(30)と、
前記流動体吐出部から前記流動体(38)を吐出させつつ、前記流動体吐出部を前記軌道生成装置によって生成された軌道に沿って移動させる制御部(20)と、を備える塗布システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、流動体を目標塗布軌跡に沿って対象物の表面に塗布するための、前記流動体を吐出する流動体吐出部の軌道を生成する軌道生成装置、及び当該軌道生成装置を備えた塗布システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、高粘性流体(例えば、接着剤)の塗布ノズルの塗布速度の変化(遅くなる、又は早くなる)を検出し、その検出値に基づいて吐出量を制御する吐出量制御装置が開示されている。
【0003】
特許文献1の吐出量制御装置によれば、例えば、コーナー塗布部において塗布ノズルの塗布速度が遅くなるため、直線塗布部からコーナー塗布部へ移る際に接着剤の吐出量を少なくし、コーナー塗布部から直線塗布部へ移る際には接着剤の吐出量を多くする。その結果、全塗布部に渡って、接着剤塗布の過不足を無くすことが可能となる。
【先行技術文献】
【特許文献】
【0004】
特開2012-45476号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
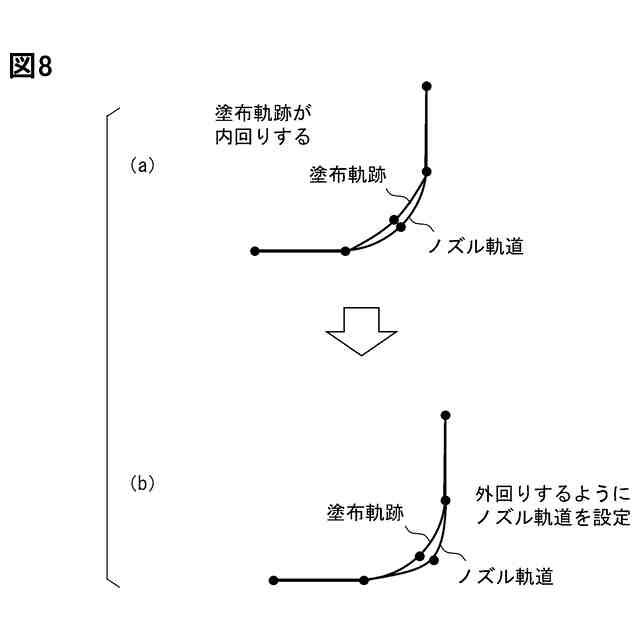
ここで、塗布ノズルなどの流動体吐出部が吐出する流動体が、流動体吐出部から対象物の表面まで繋がった状態を維持する程度の粘性を有する場合、目標とする塗布軌跡通りに流動体吐出部の軌道を定めるだけでは、必ずしも流動体を目標塗布軌跡に沿って塗布することができない場合がある。その理由は、流動性吐出部から吐出された流動体の塗布位置は、吐出された後の流動体吐出部の動きの影響を受けるためである。例えば、流動体吐出部が、目標塗布軌跡に沿って、直線軌道から曲線軌道へと軌道を変化させた場合、曲線軌道に沿って移動する流動体吐出部の影響によって、吐出された流動体の塗布軌跡は、目標塗布軌跡よりも内回りすることがある。
【0006】
本開示は、上述した点に鑑みてなされたものであり、流動体吐出部から吐出される流動体が流動体吐出部から対象物の表面まで繋がった状態を維持する程度の粘性を有していても、流動体を目標塗布軌跡に沿って対象物の表面に塗布することが可能な流動体吐出部の軌道を生成することができる軌道生成装置を提供することを第1の目的とする。さらに、当該軌道生成装置を備えた塗布システムを提供することを第2の目的とする。
【課題を解決するための手段】
【0007】
上記第1の目的を達成するために、本開示による軌道生成装置は、
流動体(38)を目標塗布軌跡に沿って対象物(50)の表面に塗布するための、流動体を吐出する流動体吐出部(30)の軌道を生成する軌道生成装置であって、
流動体吐出部が吐出する流動体は、流動体吐出部から対象物の表面まで繋がった状態を維持する粘性を有し、
流動体吐出部の実際の軌道と、流動体の実際の塗布軌跡とに基づいて学習された、流動体の粘性による挙動を考慮して流動体吐出部の軌道と流動体の塗布軌跡との関係を示す時系列モデルを記憶する記憶部(12、112)と、
目標塗布軌跡が与えられると、時系列モデルを用いて、目標塗布軌跡に対応する流動体吐出部の軌道を生成する軌道生成部(14、15、114)と、を備えることを特徴とする。
【0008】
このように、本開示による軌道生成装置は、時系列モデルを用いて、目標塗布軌跡に対応する流動体吐出部の軌道を生成する。時系列モデルは、流動体吐出部の実際の軌道と、流動体の実際の塗布軌跡とに基づいて学習されたものであり、流動体の粘性による挙動を考慮して流動体吐出部の軌道と流動体の塗布軌跡との関係を示すものである。従って、学習された時系列モデルを用いることによって、目標塗布軌跡に沿って流動体を塗布することが可能な流動体吐出部の軌道を生成することができる。
【0009】
また、上記第2の目的を達成するために、本開示による塗布システムは、
上述した軌道生成装置(10、110)と、
流動体吐出部(30)と、
流動体吐出部から流動体(38)を吐出させつつ、流動体吐出部を軌道生成装置によって生成された軌道に沿って移動させる制御部(20)と、を備える。
【0010】
上記構成により、本開示による塗布システムは、流動体が流動体吐出部から対象物の表面まで繋がった状態を維持する程度の粘性を有していても、流動体を目標塗布軌跡に沿って対象物の表面に塗布することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
7日前
株式会社デンソー
表示器
今日
株式会社デンソー
表示装置
6日前
株式会社デンソー
測距装置
21日前
株式会社デンソーテン
表示装置
26日前
株式会社デンソー
制御装置
29日前
株式会社デンソー
回転電機
20日前
株式会社デンソー
電源装置
29日前
株式会社デンソー
回転電機
20日前
株式会社デンソー
転舵装置
21日前
株式会社デンソー
電源回路
7日前
株式会社デンソー
半導体装置
27日前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
ペダル装置
15日前
株式会社デンソー
半導体装置
29日前
株式会社デンソー
回転体装置
16日前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
回転体装置
16日前
株式会社デンソー
位置検出装置
20日前
株式会社デンソー
電子制御装置
20日前
株式会社デンソー
位置検出装置
21日前
株式会社デンソー
自律搬送車両
20日前
株式会社デンソー
電池システム
20日前
株式会社デンソー
電波吸収装置
20日前
株式会社デンソー
電波吸収装置
20日前
株式会社デンソー
位置検出装置
13日前
株式会社デンソー
電池監視装置
21日前
株式会社デンソー
電子制御装置
6日前
株式会社デンソー
位置検出装置
20日前
株式会社デンソー
時間検出回路
21日前
株式会社デンソー
レーダー装置
26日前
株式会社デンソー
基準電源回路
29日前
株式会社デンソー
車載システム
今日
株式会社デンソー
位置検出装置
29日前
株式会社デンソー
位置検出装置
29日前
株式会社デンソーウェーブ
カード読取装置
26日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ