TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024076105
公報種別
公開特許公報(A)
公開日
2024-06-05
出願番号
2022187502
出願日
2022-11-24
発明の名称
測距装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
G01S
7/497 20060101AFI20240529BHJP(測定;試験)
要約
【課題】スキャン部の動作状態の異常を適切に検出可能な測距装置を提供する。
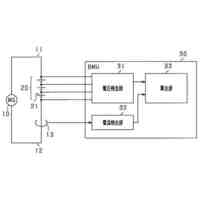
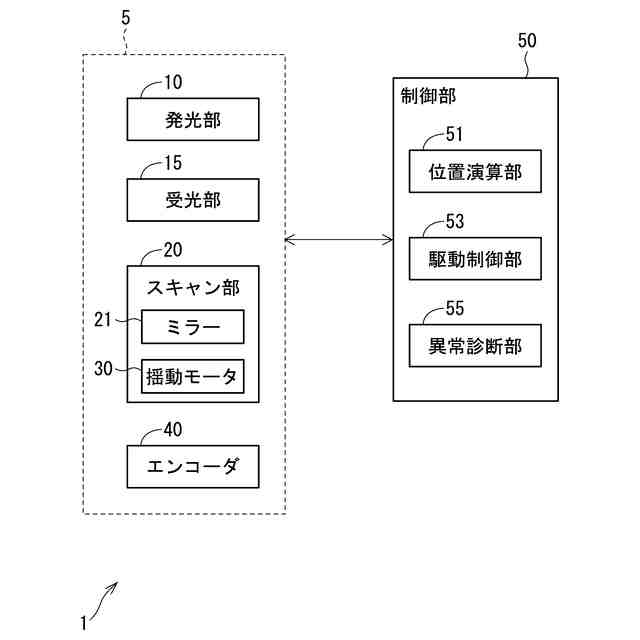
【解決手段】測距装置1は、スキャン部20と、エンコーダ40と、制御部50と、を備える。スキャン部20は、送信波を反射させるミラー21、および、送信波が走査範囲を走査するようにミラー21を揺動駆動する揺動モータ30を有する。エンコーダ40は、ミラー21の回転に応じた角度信号を出力する。制御部50は、位置演算部51、駆動制御部53、および、異常診断部55を有する。位置演算部51は、走査された光ビームを反射した物体の位置を演算する。駆動制御部53は、揺動モータ30の駆動を制御する。異常診断部55は、エンコーダ40から出力される信号に基づき、スキャン部20の動作状態に係る異常診断を行う。
【選択図】 図1
特許請求の範囲
【請求項1】
送信波を反射させるミラー(21)、および、前記送信波が走査範囲を走査するように前記ミラーを揺動駆動するアクチュエータ(30)を有するスキャン部(20)と、
前記ミラーの回転に応じた角度信号を出力するエンコーダ(40)と、
走査された前記送信波を反射した物体の位置を演算する位置演算部(51)、前記アクチュエータの駆動を制御する駆動制御部(53)、および、前記エンコーダから出力される信号に基づき、前記スキャン部の動作状態に係る異常診断を行う異常診断部(55)を有する制御部(50)と、
を備える測距装置。
続きを表示(約 500 文字)
【請求項2】
前記異常診断部は、走査制御の1周期において、前記角度信号に基づいて演算されるミラー角度の最大値および最小値の少なくとも一方が正常範囲外である場合、揺動振幅異常であると判定する請求項1に記載の測距装置。
【請求項3】
前記異常診断部は、距離測定実施可能範囲において、前記角度信号に基づいて演算される前記ミラーの角速度が正常範囲外である場合、角速度異常であると判定する請求項1に記載の測距装置。
【請求項4】
前記エンコーダは、前記角度信号として複数のパルス信号を出力するものであって、
前記異常診断部は、距離測定実施可能範囲における前記パルス信号のエッジ間隔が正常範囲外である場合、前記角度信号の出力異常であると判定する請求項1に記載の測距装置。
【請求項5】
前記エンコーダは、前記角度信号に加え、基準信号としてパルス信号を出力するものであって、
前記異常診断部は、走査制御の1周期において、前記基準信号のエッジ検出回数が正常範囲外である場合、前記基準信号の異常であると判定する請求項1に記載の測距装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、送信波を照射し、照射した送信波の物体からの反射波を検出することで物体までの距離等を検出する測距装置が知られている。測距装置には送信波の照射方向を変化させるスキャン部が搭載されており、例えば特許文献1では、スキャン部において揺動駆動されるミラーを用いている。
【先行技術文献】
【特許文献】
【0003】
特開2021-81419号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、インクリメンタルエンコーダで位置検出することで、ミラーの回転位置を制御している。しかしながら特許文献1では、スキャン部の異常検出の詳細については言及されていない。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、スキャン部の動作状態の異常を適切に検出可能な測距装置を提供することにある。
【課題を解決するための手段】
【0006】
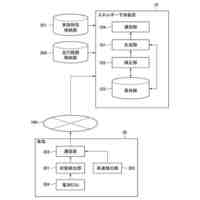
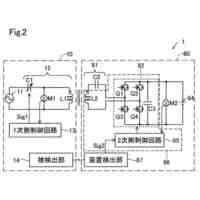
本発明の測距装置は、スキャン部(20)と、エンコーダ(40)と、制御部(50)と、を備える。スキャン部(20)は、送信波を反射させるミラー(21)、および、送信波が走査範囲を走査するようにミラーを揺動駆動するアクチュエータ(30)を有する。エンコーダは、ミラーの回転位置に応じた角度信号を出力する。
【0007】
制御部は、位置演算部(51)、駆動制御部(53)、および、異常診断部(55)を有する。位置演算部は、走査された送信波を反射した物体の位置を演算する。駆動制御部は、アクチュエータの駆動を制御する。異常診断部は、エンコーダから出力される信号に基づき、スキャン部の動作状態に係る異常診断を行う。これにより、スキャン部の動作状態の異常を適切に検出可能である。
【図面の簡単な説明】
【0008】
一実施形態による測距装置の構成を示すブロック図である。
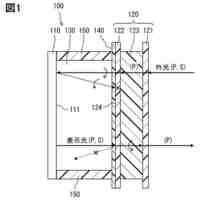
一実施形態による測距装置を上方から見た模式図である。
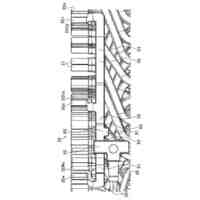
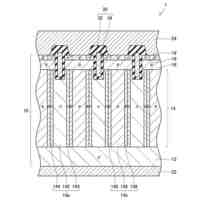
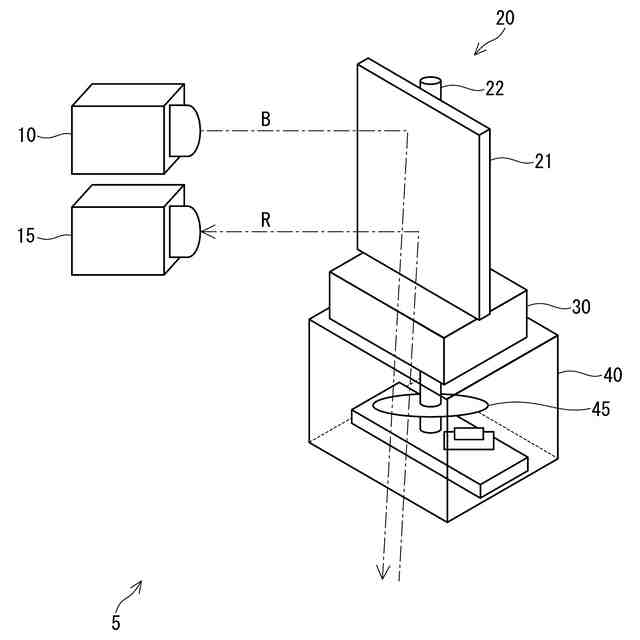
一実施形態による測定部を示す斜視図である。
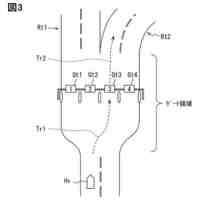
一実施形態による揺動モータを揺動軸に直交する平面で切った断面に対応する模式図である。
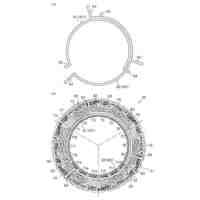
一実施形態によるエンコーダを示す分解斜視図である。
一実施形態によるミラーの動作を示す模式図である。
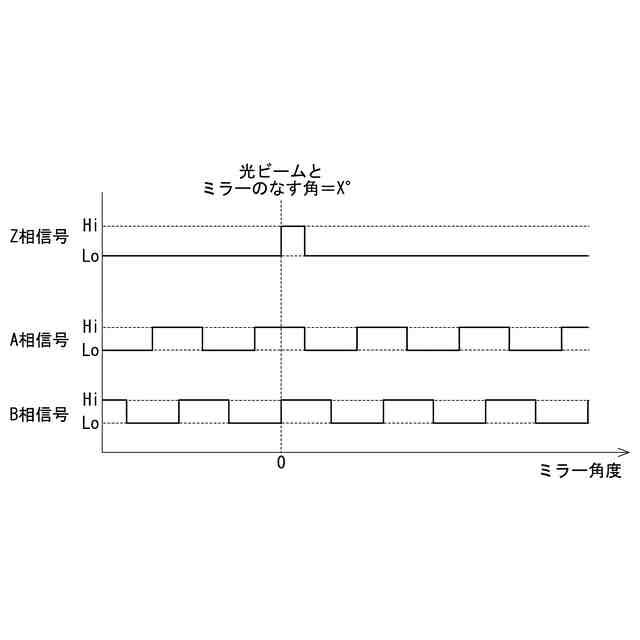
一実施形態によるA相信号、B相信号およびZ相信号を示す図である。
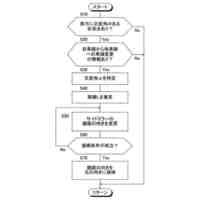
一実施形態による走査制御を説明するフローチャートである。
一実施形態による走査制御を説明するタイムチャートである。
一実施形態による振幅異常を説明するタイムチャートである。
一実施形態による振幅異常診断処理を説明するフローチャートである。
一実施形態による角速度異常を説明するタイムチャートである。
一実施形態による角速度異常診断処理を説明するフローチャートである。
一実施形態による角度信号異常を説明するタイムチャートである。
一実施形態による角度信号異常診断処理を説明するフローチャートである。
一実施形態による基準信号異常を説明するタイムチャートである。
一実施形態による基準信号異常診断処理を説明するフローチャートである。
(a)は、測距周期が相対的に長い場合のミラー角度および角速度を示すタイムチャート、(b)は、測距周期が相対的に短い場合のミラー角度および角速度を示すタイムチャートである。
(a)は、測距周期が相対的に長い場合の角度信号を示すタイムチャート、(b)は、測距周期が相対的に短い場合の角度信号を示すタイムチャートである。
(a)は、測距範囲が相対的に広い場合のミラー角度を示すタイムチャート、(b)は、測距範囲が相対的に狭い場合のミラー角度を示すタイムチャートである。
(a)は、測距範囲が相対的に広い場合の角速度を示すタイムチャート、(b)は、測距範囲が相対的に狭い場合の角速度を示すタイムチャートである。
(a)は、測距範囲が相対的に広い場合の角度信号を示すタイムチャート、(b)は、測距範囲が相対的に狭い場合の角度信号を示すタイムチャートである。
(a)は正転時に距離計測を行う場合のミラー角度および角速度を示すタイムチャート、(b)は逆転時に距離計測を行う場合のミラー角度および角速度を示すタイムチャートである。
【発明を実施するための形態】
【0009】
(一実施形態)
以下、本発明による測距装置を図面に基づいて説明する。一実施形態を図1~図23に示す。図1および図2に示すように、測距装置1は、光を照射し、光が照射された物体からの反射光を検出することにより、物体との距離を測定するライダ(LiDAR:Light Detection and Ranging)装置である。測距装置1は、例えば車両に搭載され、車両前方に存在する物体の検出に用いられる。
【0010】
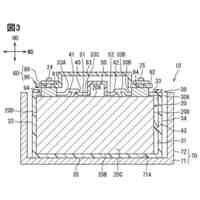
測距装置1は、測定部5と、制御部50と、を備える。測定部5は、発光部10と、受光部15と、スキャン部20と、エンコーダ40と、を備える。図2に示すように、測定部5は、筐体6に収容されている。筐体6は、例えば樹脂で形成される直方体状であって、1つの側面が開口している。開口部には、開口全体を覆うように、光が透過する透明の光学窓7が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
表示器
今日
株式会社デンソー
変調器
7日前
株式会社デンソー
表示装置
6日前
株式会社デンソー
電源回路
7日前
株式会社デンソー
電子制御装置
6日前
株式会社デンソー
車載システム
今日
株式会社デンソー
超音波発生装置
7日前
株式会社デンソー
スイッチング素子
7日前
株式会社デンソー
エネルギー予測装置
1日前
株式会社デンソー
中性線、及び回転電機
1日前
株式会社デンソー
半導体装置の製造方法
今日
株式会社デンソー
半導体装置の製造方法
7日前
株式会社デンソー
半導体装置の製造方法
2日前
株式会社デンソー
半導体装置の製造方法
今日
株式会社デンソー
MEMSマイクロフォン
7日前
株式会社デンソー
半導体装置とその製造方法
7日前
株式会社デンソー
車両制御装置、車両制御方法
6日前
株式会社デンソー
通知制御装置、通知制御方法
6日前
株式会社デンソー
コイル体、電機子及び回転電機
2日前
株式会社デンソー
路面干渉センサ、監視システム
6日前
株式会社デンソー
固定子、及び固定子の製造方法
7日前
株式会社デンソー
残容量算出装置及びプログラム
2日前
株式会社デンソー
炭化珪素半導体装置の製造方法
今日
株式会社SOKEN
物体検知装置
6日前
株式会社デンソー
ワーク整列装置及びワーク整列方法
2日前
トヨタ自動車株式会社
運転支援装置
6日前
株式会社デンソー
回転電機の制御装置、及びプログラム
7日前
トヨタ自動車株式会社
車両制御装置
6日前
トヨタ自動車株式会社
車両制御装置
6日前
トヨタ自動車株式会社
車両制御装置
6日前
株式会社デンソー
電池モジュール、および、電池スタック
7日前
株式会社デンソー
半導体装置および半導体装置の製造方法
2日前
株式会社デンソー
処理システム、処理方法、処理プログラム
今日
株式会社デンソー
非接触給電システム、受電装置、および送電装置
今日
トヨタ自動車株式会社
車両用サイドミラー制御装置
6日前
株式会社デンソー
処理システム、処理装置、処理方法、処理プログラム
今日
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ