TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024075322
公報種別
公開特許公報(A)
公開日
2024-06-03
出願番号
2022186695
出願日
2022-11-22
発明の名称
検出方法、検出器具、支援システム、及び、コンピュータプログラム
出願人
学校法人立命館
,
国立大学法人京都大学
代理人
個人
主分類
G01N
3/00 20060101AFI20240527BHJP(測定;試験)
要約
【課題】弾性体の内部の弾性率の特異部を高精度で検出が可能な支援システムを提供する。
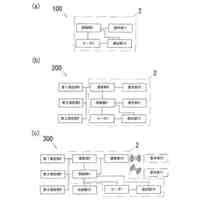
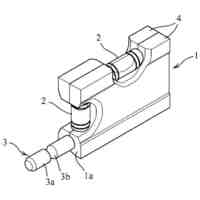
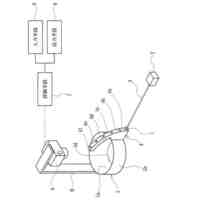
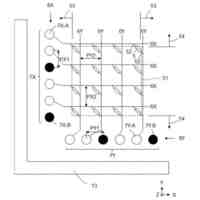
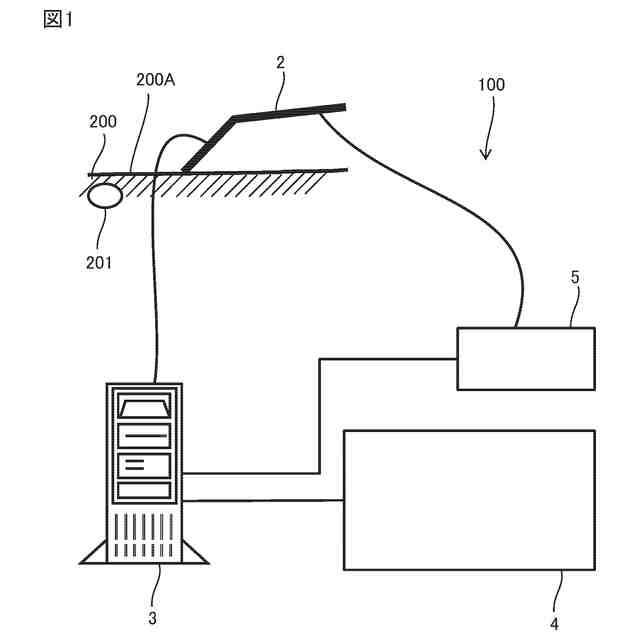
【解決手段】支援システム100は生体の触診を支援する支援システムであって、弾性体の内部の弾性率の特異部の検出に用いられる検出器具2と、特異部の検出のための演算を行う演算装置3と、出力装置4と、を備え、検出器具は、生体の表面を押圧する押圧部材と、押圧部材の表面への押込み方向を可変とするアクチュエータと、押圧された表面上の点における反力を測定するセンサと、を有し、検出器具によって押圧する表面上の位置を指示する操作装置5を備え、演算装置は、表面を、接平面の法線方向に対して角度を成す押込み方向に押圧したときの各押圧点から受ける反力の測定結果を得、複数の押圧点のうち、第1の押込み方向に押圧したときの第1の測定結果と、第2の押込み方向に押圧したときの第2の測定結果と、を用いて特異部の表面上での位置を検出する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータにおいて実行される、弾性体の内部の弾性率の特異部の検出方法であって、
前記弾性体の表面を、接平面の法線方向に対して角度を成す押込み方向に押圧したときの各押圧点から受ける反力の測定結果を得、
複数の前記押圧点のうち、第1の押込み方向に押圧したときの第1の測定結果と、前記第1の押込み方向とは異なる第2の押込み方向に押圧したときの第2の測定結果と、を用いて前記特異部の前記表面上での位置を検出する、ことを含む
検出方法。
続きを表示(約 1,300 文字)
【請求項2】
前記第1の測定結果と前記第2の測定結果とを用いることは、前記表面上の第1線と第2線との交点を得ることを含み、
前記第1線は、前記第1の押込み方向に押圧したときの前記反力が最大の第1の押圧点を通る、前記第1の押込み方向の前記表面上の線であり、
前記第2線は、前記第2の押込み方向に押圧したときの前記反力が最大の第2の押圧点を通る、前記第2の押込み方向の前記表面上の線である
請求項1に記載の検出方法。
【請求項3】
前記第1の押圧点は、前記複数の押圧点それぞれの前記第1の押込み方向に押圧したときの前記反力を比較して、前記反力が最大の点であり、かつ、前記反力が閾値以上の押圧点である
請求項2に記載の検出方法。
【請求項4】
前記第2線は、前記第1の押圧点から前記第1の押込み方向が向かう位置にある複数の押圧点それぞれを前記第2の押込み方向に押圧したときの前記反力が最大の第2の押圧点を通る
請求項2に記載の検出方法。
【請求項5】
前記交点を得ることは、
前記第1の押圧点から前記第1の押込み方向が向かう位置にある複数の押圧点を、前記第1の押圧点から前記第1の押込み方向が向かう順に前記第2の押込み方向に押圧し、
測定された前記反力が最大の点を前記交点として得る、ことを含む
請求項4に記載の検出方法。
【請求項6】
前記押圧点における前記押込み方向と、前記押圧による前記押圧点の位置の変化量と、前記特異部の前記表面上での位置からの距離と、を用いて、前記特異部の前記表面からの距離を算出する、ことをさらに含む
請求項1に記載の検出方法。
【請求項7】
弾性体の内部の弾性率の特異部の検出に用いられる検出器具であって、
前記弾性体の表面を押圧する押圧部材と、
前記押圧部材の前記表面への押込み方向を可変とするアクチュエータと、
前記押圧部材によって押圧された前記表面の押圧点から受ける反力を測定する第1センサと、を備える
検出器具。
【請求項8】
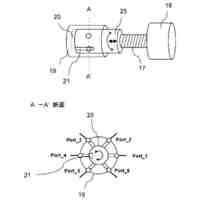
前記押込み方向を検出する第2センサをさらに備える
請求項7に記載の検出器具。
【請求項9】
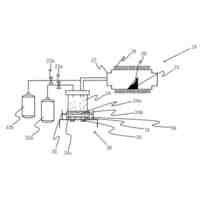
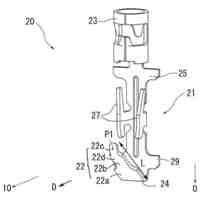
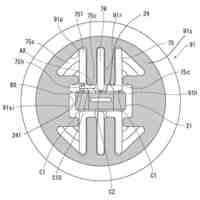
前記アクチュエータは、内部に供給された流体の流体圧によって表面の膜体が伸びつつ膨張し、当該伸びによって生じた引っ張り応力によって曲がり運動を行うバルーンアクチュエータであって、
前記膜体は、
流体圧によって伸びが生じる第1膜体と、
流体圧によって伸びが生じるとともに、伸びによって生じる引っ張り応力が前記第1膜体とは異なるよう構成され、前記第1膜体との間に前記流体が供給されるよう前記第1膜体に接合された第2膜体と、を有して構成され、
前記曲がり運動によって前記押圧部材の前記表面に対する角度を変化させる
請求項7に記載の検出器具。
【請求項10】
前記押圧部材は、前記表面に接触する位置に、前記表面側に凸の突起を有する
請求項7に記載の検出器具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、検出方法、検出器具、支援システム、及び、コンピュータプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
弾性体の反力を計測する手法として、直動型デバイスが知られている。直動型デバイスは、弾性体の表面に法線方向に押圧部材を押し込むことで押圧し、押圧部材が弾性体の表面から受ける反力を計測するものである。
【先行技術文献】
【特許文献】
【0003】
特開2006-204612号公報
【発明の概要】
【0004】
直動型デバイスを用いて計測される反力は、弾性体の表面から法線方向の反力である。そのため、直動型デバイスを用いると、押圧部材を押し込む位置の直下に弾性率の特異部が存在しない場合に、特異部が高精度で検出できない場合がある、という問題がある。
【0005】
弾性体の内部の弾性率の特異部の検出は、例えば、生体組織内の悪性腫瘍の検出などが挙げられる。この場合の手法として、低侵襲性治療の一つである内視鏡外科手術が注目されている。内視鏡外科手術では医師の手による触診での悪性腫瘍等の位置の検知ができない。そのため、医師の手による触診に替えてデバイスを用いることが考えられるものの、特に、生体の特異部を検出する場合、その表面は平面でないことも多く、直動型デバイスを用いることが難しい。また、内視鏡外科手術では押圧部材を表面の法線方向に押し込むためのスペースが確保できない場合もある。従って、特異部を高精度で検出が可能な検出方法、検出器具、支援システム、及び、コンピュータプログラムが求められている。
【0006】
ある実施の形態に従うと、検出方法は、コンピュータにおいて実行される、弾性体の内部の弾性率の特異部の検出方法であって、弾性体の表面を、接平面の法線方向に対して角度を成す押込み方向に押圧したときの各押圧点から受ける反力の測定結果を得、複数の押圧点のうち、第1の押込み方向に押圧したときの第1の測定結果と、第1の押込み方向とは異なる第2の押込み方向に押圧したときの第2の測定結果と、を用いて特異部の表面上での位置を検出する、ことを含む。
【0007】
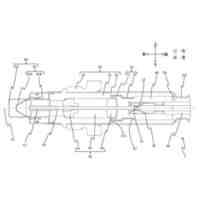
ある実施の形態に従うと、検出器具は弾性体の内部の弾性率の特異部の検出に用いられる検出器具であって、弾性体の表面を押圧する押圧部材と、押圧部材の表面への押込み方向を可変とするアクチュエータと、押圧部材によって押圧された表面の押圧点から受ける反力を測定する第1センサと、を備える。
【0008】
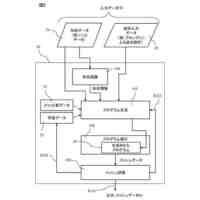
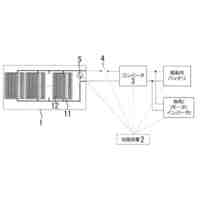
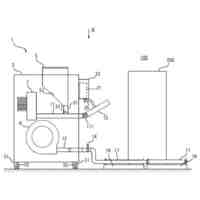
ある実施の形態に従うと、支援システムは生体の触診を支援する支援システムであって、弾性体の内部の弾性率の特異部の検出に用いられる検出器具と、特異部の検出のための演算を行う演算装置と、出力装置と、を備え、検出器具は、生体の表面を押圧する押圧部材と、押圧部材の表面への押込み方向を可変とするアクチュエータと、押圧部材によって押圧された表面上の点における反力を測定するセンサと、を有し、支援システムは検出器具によって押圧する表面上の位置を指示する操作装置をさらに備え、演算装置は、表面を、接平面の法線方向に対して角度を成す押込み方向に押圧したときの各押圧点から受ける反力の測定結果を得、複数の押圧点のうち、第1の押込み方向に押圧したときの第1の測定結果と、第1の押込み方向とは異なる第2の押込み方向に押圧したときの第2の測定結果と、を用いて特異部の表面上での位置を検出する、ことを含み、出力装置は、演算装置によって得られた特異部の表面上での位置を出力する。
【0009】
ある実施の形態に従うと、コンピュータプログラムはコンピュータに弾性体の内部の弾性率の特異部の検出のための演算を行わせるコンピュータプログラムであって、演算は、弾性体の表面を、接平面の法線方向に対して角度を成す押込み方向に押圧したときの各押圧点から受ける反力の測定結果を得、複数の押圧点のうち、第1の押込み方向に押圧したときの第1の測定結果と、第1の押込み方向とは異なる第2の押込み方向に押圧したときの第2の測定結果と、を用いて特異部の表面上での位置を検出する、ことを含む。
【0010】
更なる詳細は、後述の実施形態として説明される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人立命館
流路構造、流路構造製造方法
10日前
株式会社東洋レーベル
入眠促進装置
6日前
学校法人立命館
筋組織カルシウム蓄積を抑制するビタミンD作用
1か月前
学校法人立命館
異種タンパク質の大量生産が可能なナス科植物の四重変異体
3日前
学校法人立命館
メッシュ生成システム、コンピュータ実装方法及びコンピュータプログラム
9日前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
1か月前
学校法人立命館
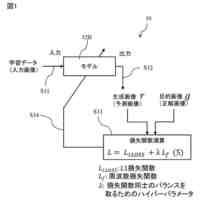
周波数損失関数を用いた画質改善方法、コンピュータシステム及びコンピュータプログラム
7日前
学校法人立命館
残差推定ネットワークを用いた画質改善方法、コンピュータシステム及びコンピュータプログラム
7日前
日産自動車株式会社
車載用太陽光発電システム及び車載用太陽電池パネルの動作電圧を決定する方法
1か月前
白山工業株式会社
液体貯蔵容器の内側底部を保護する方法、及び、液体貯蔵容器の内側底部を保護する構造
29日前
個人
粒子分析装置
28日前
株式会社イシダ
計量装置
22日前
日本精機株式会社
表示装置
8日前
日本精機株式会社
アセンブリ
14日前
個人
アクセサリー型テスター
29日前
株式会社エビス
水準器
7日前
個人
準結晶の解析方法
14日前
株式会社豊田自動織機
自動走行体
13日前
株式会社ミツトヨ
画像測定機
1か月前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
個人
浸透探傷試験方法
3日前
株式会社テイエルブイ
振動検出装置
28日前
日本碍子株式会社
ガスセンサ
7日前
株式会社不二越
塵埃噴射装置
2日前
トヨタ自動車株式会社
制御装置
3日前
株式会社東芝
センサ
2日前
ダイハツ工業株式会社
試料セル
28日前
トヨタ自動車株式会社
検査装置
22日前
日本特殊陶業株式会社
ガスセンサ
14日前
GEE株式会社
光学特性測定装置
13日前
トヨタ自動車株式会社
電気自動車
29日前
日本特殊陶業株式会社
ガスセンサ
2日前
日本特殊陶業株式会社
ガスセンサ
1日前
大和製衡株式会社
計量装置
1か月前
TDK株式会社
アレイセンサ
3日前
東ソー株式会社
簡易型液体クロマトグラフ
24日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ