TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024073213
公報種別
公開特許公報(A)
公開日
2024-05-29
出願番号
2022184309
出願日
2022-11-17
発明の名称
車両用制御装置
出願人
株式会社アイシン
代理人
弁理士法人R&C
主分類
B60L
15/20 20060101AFI20240522BHJP(車両一般)
要約
【課題】トルクの変化率に制限値が設定されていても、波状路面を走行する際に生じるトルク振動を適切に抑制することができる車両用制御装置を提供する。
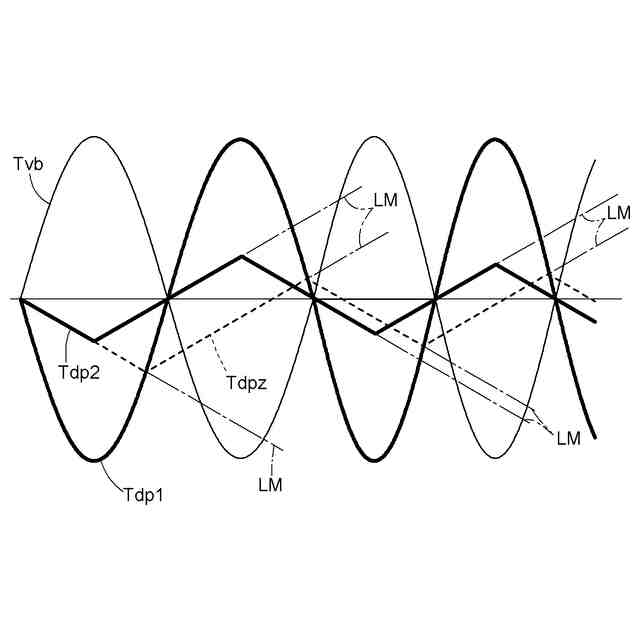
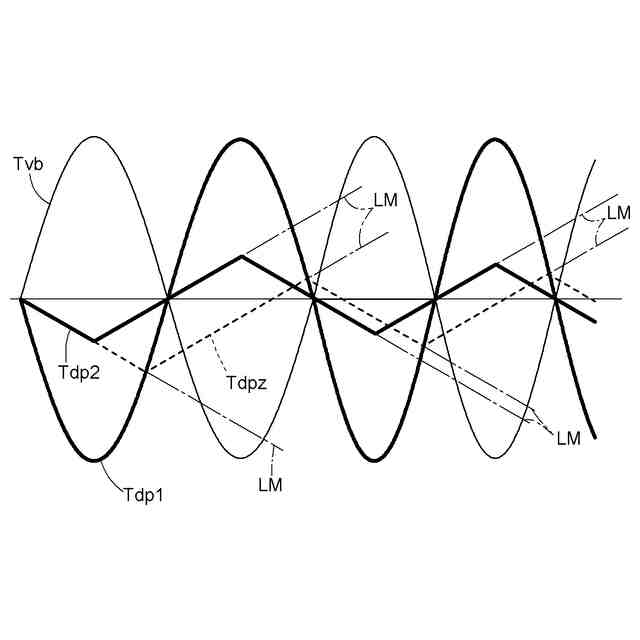
【解決手段】制振制御部は、対象トルク振動Tvbを打ち消すための第1制振トルク値Tdp1を演算し、第1制振トルク値Tdp1の変化率が制限値LM以下である場合には、第1制振トルク値Tdp1を車輪駆動トルクに重畳させる第1制振制御を、変化率が制限値LMより大きい場合には、第2制振トルク値Tdp2を車輪駆動トルクに重畳させる第2制振制御を実行する。第2制振制御では、第2制振トルク値Tdp2の絶対値を第1制振トルク値Tdp1の絶対値よりも小さくすることで、制限値LM以下の変化率で第2制振トルク値Tdp2を変化させつつ、第2制振トルク値Tdp2の周波数及び位相を第1制振トルク値Tdp1の周波数及び位相に合わせる。
【選択図】図2
特許請求の範囲
【請求項1】
回転電機と前記回転電機の駆動力を車輪に伝達する駆動伝達機構とを備えた車両を制御する車両用制御装置であって、
前記車両が、進行方向に沿って凹凸が繰り返される路面である波状路面を走行中であるか否かを判定する判定部と、
前記車両が前記波状路面を走行することにより前記車輪に伝達されるトルクの振動である対象トルク振動を低減させる制振制御を実行する制振制御部と、を備え、
前記制振制御とは関係なく前記回転電機に要求される出力トルクを車輪駆動トルクとして、
前記制振制御部は、
前記判定部により前記車両が前記波状路面を走行中であると判定された場合に、前記対象トルク振動を打ち消すための各時点での前記回転電機の出力トルクの値である第1制振トルク値を演算し、
前記対象トルク振動に応じた前記第1制振トルク値の変化率が予め定められた制限値以下である場合には、前記第1制振トルク値を前記車輪駆動トルクに重畳させる第1制振制御を実行し、
前記対象トルク振動に応じた前記第1制振トルク値の変化率が前記制限値より大きい場合には、前記第1制振トルク値とは異なる第2制振トルク値を前記車輪駆動トルクに重畳させる第2制振制御を実行し、
前記第2制振制御では、前記第2制振トルク値の絶対値を前記第1制振トルク値の絶対値よりも小さくすることで、前記制限値以下の変化率で前記第2制振トルク値を変化させつつ、周期的に変化する前記第2制振トルク値の周波数及び位相を前記第1制振トルク値の周波数及び位相に合わせる、車両用制御装置。
続きを表示(約 910 文字)
【請求項2】
前記車両は、前記車輪に制動力を付与する制動装置を更に備え、
前記回転電機が出力可能なトルクの絶対値の上限を限界トルク値として、
前記制振制御部は、
前記車輪駆動トルクと前記第1制振トルク値との合計である合計トルクの絶対値が前記限界トルク値以下である場合には、前記第1制振制御又は前記第2制振制御を実行し、
前記合計トルクの絶対値が前記限界トルク値を超えることになる場合には、前記制動装置による前記制動力を制御することにより、前記対象トルク振動を打ち消すためのトルクを前記制動装置により生じさせる第3制振制御を実行する、請求項1に記載の車両用制御装置。
【請求項3】
前記車両が前記波状路面を走行中に、前記車輪が前記路面から浮いている期間を浮上期間とし、前記車輪が前記路面に接している期間を接地期間として、
前記制振制御部は、前記第3制振制御において、前記車両が加速中である場合には、前記浮上期間の前記制動力を前記接地期間の前記制動力よりも大きくし、前記車両が減速中である場合には、前記浮上期間の前記制動力を前記接地期間の前記制動力よりも小さくする、請求項2に記載の車両用制御装置。
【請求項4】
前記制限値と同じ変化率で前記対象トルク振動を打ち消すように前記対象トルク振動に追従させる制振トルク値を補正前制振トルク値とし、
前記対象トルク振動の振幅中心からピークまでの時間と前記補正前制振トルク値の振幅中心からピークまでの時間との差を差分時間とし、
前記制振制御部は、前記第2制振制御において、前記補正前制振トルク値のピークよりも前記差分時間前の時点がピークとなるように補正して前記第2制振トルク値を決定する、請求項1から3の何れか一項に記載の車両用制御装置。
【請求項5】
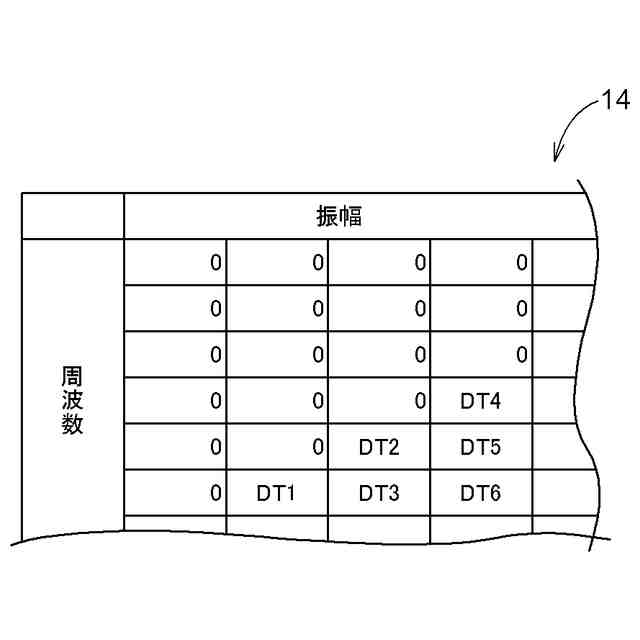
前記対象トルク振動の振幅と周波数との組み合わせごとの前記差分時間の情報を格納した差分時間データベースを備え、
前記制振制御部は、前記差分時間データベースに基づいて前記差分時間を設定する、請求項4に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転電機と回転電機の駆動力を車輪に伝達する駆動伝達機構とを備えた車両を制御する車両用制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特開2015-33194号公報には、進行方向に沿って凹凸が繰り返される路面である波状路面を走行する際に車輪に伝達されるトルク振動を抑制する車両用制御装置が開示されている。以下、背景技術において括弧内の符号は参照する文献のものである。車両用制御装置のコントローラ(10)は、車両が波状路面を走行しているか否かを判定する波状路走行判定部(11)と、波状路面を走行中に車輪が浮いた状態の空転状態であるか、車輪が路面に接している設置状態であるかを判定する接地状態判定部(12)と、車輪の駆動力源であるモータ駆動ユニット(4L,4R)の駆動トルクを制御するトルク制御部(13)とを備えている。トルク制御部(13)は、空転状態においては、モータ駆動ユニット(4L,4R)の駆動トルクを目標駆動トルクよりも低下させ、接地状態においては、モータ駆動ユニット(4L,4R)の駆動トルクを空転状態における駆動トルクよりも増加させる。
【先行技術文献】
【特許文献】
【0003】
特開2015-33194号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、制御の安定性を保つために、駆動力源に出力させるトルクの目標値である目標駆動トルクなどの制御対象となる変数にはコントローラ等の制御単位当たりの変化量である変化率に制限が設けられている。車両が波状路面を走行することに伴って生じるトルク振動を抑制するための制振トルクも、そのような変数の1つである。このため、当該制限によって、トルク振動の増加に対して制振トルクの追従が遅れる場合がある。このような遅れは、振動波形であるトルク振動がピークを超えて振幅中心に向かう場合や、振幅中心を過ぎて正負が逆転する場合にも残る。その結果、波状路面の走行に応じて生じるトルク振動と、これを抑制するための制振トルクとの同期がずれ、部分的にはトルク振動と制振トルクとの振動方向が一致して、トルク振動を増加させてしまうおそれもある。即ち、トルク振動を適切に低減することができないおそれがある。
【0005】
上記背景に鑑みて、トルクの変化率に制限値が設定されていても、波状路面を走行する際に生じるトルク振動を適切に抑制することができる車両用制御装置の提供が望まれる。
【課題を解決するための手段】
【0006】
上記に鑑みた車両用制御装置は、回転電機と前記回転電機の駆動力を車輪に伝達する駆動伝達機構とを備えた車両を制御する車両用制御装置であって、前記車両が、進行方向に沿って凹凸が繰り返される路面である波状路面を走行中であるか否かを判定する判定部と、前記車両が前記波状路面を走行することにより前記車輪に伝達されるトルクの振動である対象トルク振動を低減させる制振制御を実行する制振制御部と、を備え、前記制振制御とは関係なく前記回転電機に要求される出力トルクを車輪駆動トルクとして、前記制振制御部は、前記判定部により前記車両が前記波状路面を走行中であると判定された場合に、前記対象トルク振動を打ち消すための各時点での前記回転電機の出力トルクの値である第1制振トルク値を演算し、前記対象トルク振動に応じた前記第1制振トルク値の変化率が予め定められた制限値以下である場合には、前記第1制振トルク値を前記車輪駆動トルクに重畳させる第1制振制御を実行し、前記対象トルク振動に応じた前記第1制振トルク値の変化率が前記制限値より大きい場合には、前記第1制振トルク値とは異なる第2制振トルク値を前記車輪駆動トルクに重畳させる第2制振制御を実行し、前記第2制振制御では、前記第2制振トルク値の絶対値を前記第1制振トルク値の絶対値よりも小さくすることで、前記制限値以下の変化率で前記第2制振トルク値を変化させつつ、周期的に変化する前記第2制振トルク値の周波数及び位相を前記第1制振トルク値の周波数及び位相に合わせる。
【0007】
本構成によれば、第1制振トルク値の変化率が制限値以下である場合には第1制振制御を実行することにより、対象トルク振動を適切に低減することができる。一方、第1制振トルク値の変化率が制限値よりも大きい場合には、制振制御における追従性が低下し、対象トルク振動と制限後の制振トルク値との同期がずれて部分的にトルク振動を増加させてしまうなど、トルク振動を適切に低減することができないおそれがある。しかし、本構成によれば、第1制振トルク値の変化率が制限値より大きい場合にも、回転電機の出力トルクの変化率を制限値以下に抑えつつ、対象トルク振動に同期して変化する第2制振トルク値を車輪駆動トルクに重畳することができる。従って、制振トルク値の変化率が制限値を超えない範囲で、対象トルク振動を適切に低減することができる。即ち、本構成によれば、トルク変化率に制限値が設定されていても、波状路面を走行する際に生じるトルク振動を適切に抑制することができる。
【0008】
車両用制御装置のさらなる特徴と利点は、図面を参照して説明する例示的且つ非限定的な実施形態についての以下の記載から明確となる。
【図面の簡単な説明】
【0009】
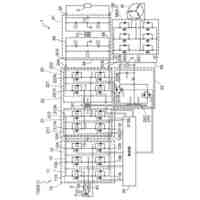
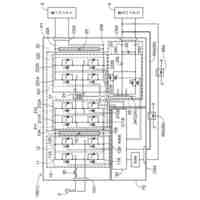
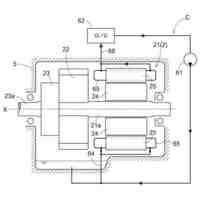
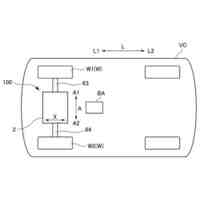
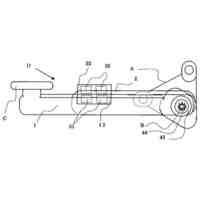
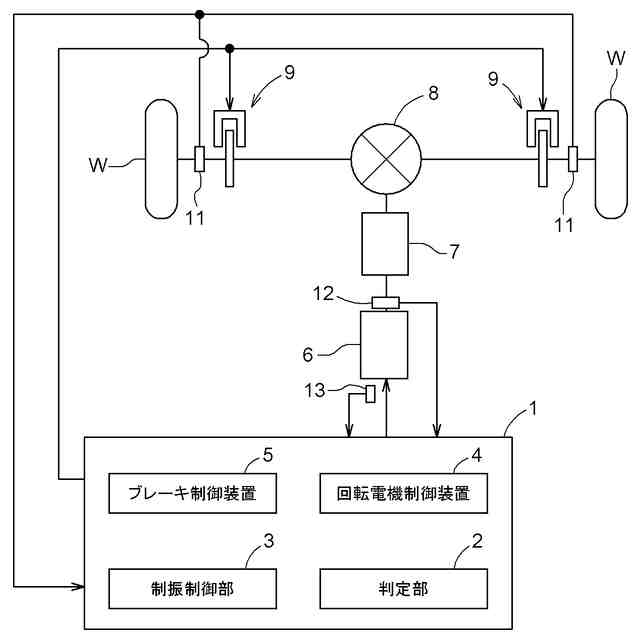
車両用制御装置による回転電機及び駆動伝達機構の制御構成の一例を示すブロック図
第1制振トルク値、第2制振トルク値及び補正前制振トルク値の関係を示す波形図
補正前制振トルク値を補正して第2制振トルク値を決定する原理を示す波形図
制振制御の手順の一例を示すフローチャート
差分時間データベースの構成例を示す図
【発明を実施するための形態】
【0010】
以下、車両用制御装置の実施形態を図面も参照して説明する。図1に示すように、車両用制御装置1は、回転電機6と、回転電機6の駆動力を車輪Wに伝達する駆動伝達機構とを備えた車両を制御する。本実施形態では、駆動伝達機構は、減速機7(変速機であってもよい)及び出力用差動歯車機構8に対応する。回転電機6は、一対の車輪Wの駆動源である。出力用差動歯車機構8は、回転電機6から減速機7を介して伝達された動力を一対の車輪Wに分配する。尚、駆動伝達機構は、減速機7を備えることなく、出力用差動歯車機構8のみを備えて構成されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
電源装置
15日前
株式会社アイシン
回転電機
7日前
株式会社アイシン
電源装置
15日前
株式会社アイシン
電源装置
15日前
株式会社アイシン
電源装置
15日前
株式会社アイシン
加湿装置
15日前
株式会社アイシン
冷却システム
15日前
株式会社アイシン
冷却システム
15日前
株式会社アイシン
熱電発電装置
6日前
株式会社アイシン
ヒートシンク
6日前
株式会社アイシン
車両用駆動装置
15日前
株式会社アイシン
車両用駆動装置
8日前
株式会社アイシン
電源モジュール
15日前
株式会社アイシン
車両用駆動装置
15日前
株式会社アイシン
車両用駆動装置
15日前
株式会社アイシン
車両用駆動装置
1日前
株式会社アイシン
バキュームポンプ
1日前
株式会社アイシン
燃料電池モジュール
6日前
株式会社アイシン
車両用ステップ装置
13日前
株式会社アイシン
非晶質合金片の製造方法
15日前
株式会社アイシン
非晶質合金片の製造方法
15日前
株式会社アイシン
フリーピストンエンジン
8日前
トヨタ自動車株式会社
プレス装置
13日前
株式会社アイシン
運転支援装置及びコンピュータプログラム
15日前
株式会社アイシン
運転支援装置及びコンピュータプログラム
15日前
日置電機株式会社
試験装置および試験方法
6日前
株式会社アイシン
回転電機用ステータ及び回転電機用ステータの製造方法
今日
個人
設置部材
1か月前
個人
骨組み型熱交換器
2か月前
個人
自動車暴走抑制装置
2か月前
個人
車内雨傘載置収納具
1か月前
個人
荷台雨除け装置
1日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社タイヨー産業
補助枕
1か月前
東レ株式会社
フロントグリル
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ