TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024066804
公報種別
公開特許公報(A)
公開日
2024-05-16
出願番号
2022176516
出願日
2022-11-02
発明の名称
電動機駆動制御装置および該方法ならびに電動機駆動制御システム
出願人
株式会社神戸製鋼所
代理人
個人
,
個人
主分類
H02P
21/00 20160101AFI20240509BHJP(電力の発電,変換,配電)
要約
【課題】本発明は、構成を簡素化できる電動機駆動制御装置、電動機駆動制御方法および電動機駆動制御システムを提供する。
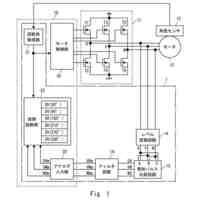
【解決手段】本発明の電動機駆動制御装置は、インバータ回路の出力で駆動される電動機を制御する装置であって、複数の出力候補の中から所定の評価関数によって1つの出力候補を選択する選択部12と、選択部12で選択した出力候補を出力するように、前記インバータ回路を制御するインバータ制御部13とを備え、前記評価関数は、互いに異なる複数の制御方式それぞれに対応した複数の制御方式対応項および複数の制御方式対応重み係数を含む関数であり、選択部12は、制御方式を切り換える場合に、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する。
【選択図】図2
特許請求の範囲
【請求項1】
インバータ回路の出力で駆動される電動機を制御する電動機駆動制御装置であって、
複数の出力候補の中から所定の評価関数によって1つの出力候補を選択する選択部と、
前記選択部で選択した出力候補を出力するように、前記インバータ回路を制御するインバータ制御部とを備え、
前記評価関数は、互いに異なる複数の制御方式それぞれに対応した複数の制御方式対応項および複数の制御方式対応重み係数を含む関数であり、
前記選択部は、制御方式を切り換える場合に、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する、
電動機駆動制御装置。
続きを表示(約 2,200 文字)
【請求項2】
前記選択部は、
前記インバータ回路で出力可能な時系列な電圧パターンを、互いに異なるように複数、前記複数の出力候補として生成する電圧パターン生成部と、
前記電圧パターン生成部で生成した複数の時系列な電圧パターンそれぞれについて、当該時系列な電圧パターンが前記電動機に入力された場合での、前記電動機における前記制御方式に応じた制御目的に関する所定の物理量の値を予測値として予測する予測部と、
前記電圧パターン生成部で生成した複数の時系列な電圧パターンの中から、前記予測部で予測された前記電動機の各予測値の中で前記評価関数に基づく最も高い評価の予測値に対応する時系列な電圧パターンを前記1つの出力候補として選択する電圧パターン選択部とを備える、
請求項1に記載の電動機駆動制御装置。
【請求項3】
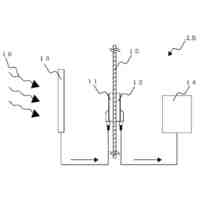
前記電動機を動力源として移動する所定のツールと、
前記ツールにおける所定の箇所の位置を測定する位置測定部とをさらに備え、
前記複数の制御方式は、前記ツールの位置偏差または前記位置偏差に基づく前記電動機の速度偏差に基づき制御する第1制御方式と、前記電動機のトルク偏差または前記トルク偏差基づく前記電動機の電流偏差に基づき制御する第2制御方式とであり、
前記選択部は、前記位置偏差と目標位置に対する所定の第1偏差閾値との第1比較結果および前記トルク偏差または前記電流偏差と所定の第2偏差閾値との第2比較結果に基づき第1制御方式と第2制御方式とを切り換える、
請求項1に記載の電動機駆動制御装置。
【請求項4】
前記選択部は、制御方式を切り換える場合に、前記複数の制御方式対応重み係数を時間変化に伴い連続的に変化させることによって、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する、
請求項1に記載の電動機駆動制御装置。
【請求項5】
インバータ回路の出力で駆動される電動機を制御する電動機駆動制御方法であって、
複数の出力候補の中から所定の評価関数によって1つの出力候補を選択する選択工程と、
前記選択工程で選択した出力候補を出力するように、前記インバータ回路を制御するインバータ制御工程とを備え、
前記評価関数は、互いに異なる複数の制御方式それぞれに対応した複数の制御方式対応項および複数の制御方式対応重み係数を含む関数であり、
前記選択工程は、制御方式を切り換える場合に、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する、
電動機駆動制御方法。
【請求項6】
前記選択工程は、
前記インバータ回路で出力可能な時系列な電圧パターンを、互いに異なるように複数、前記複数の出力候補として生成する電圧パターン生成工程と、
前記電圧パターン生成工程で生成した複数の時系列な電圧パターンそれぞれについて、当該時系列な電圧パターンが前記電動機に入力された場合での、前記電動機における前記制御方式に応じた制御目的に関する所定の物理量の値を予測値として予測する予測工程と、
前記電圧パターン生成工程で生成した複数の時系列な電圧パターンの中から、前記予測工程で予測された前記電動機の各予測値の中で前記評価関数に基づく最も高い評価の予測値に対応する時系列な電圧パターンを前記1つの出力候補として選択する電圧パターン選択工程とを備える、
請求項5に記載の電動機駆動制御方法。
【請求項7】
前記電動機を動力源として移動する所定のツールと、
前記ツールにおける所定の箇所の位置を測定する位置測定部とをさらに備え、
前記複数の制御方式は、前記ツールの位置偏差または前記位置偏差に基づく前記電動機の速度偏差に基づき制御する第1制御方式と、前記電動機のトルク偏差または前記トルク偏差基づく前記電動機の電流偏差に基づき制御する第2制御方式とであり、
前記選択工程は、前記位置偏差と目標位置に対する所定の第1偏差閾値との第1比較結果および前記トルク偏差または前記電流偏差と所定の第2偏差閾値との第2比較結果に基づき第1制御方式と第2制御方式とを切り換える、
請求項5に記載の電動機駆動制御方法。
【請求項8】
前記選択工程は、制御方式を切り換える場合に、前記複数の制御方式対応重み係数を時間変化に伴い連続的に変化させることによって、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する、
請求項5に記載の電動機駆動制御方法。
【請求項9】
電動機と、
前記電動機を駆動するインバータ回路と、
前記インバータ回路を制御することで前記電動機を制御する電動機駆動制御部とを備え、
前記電動機駆動制御部は、請求項1ないし請求項4のいずれか1項に記載の電動機駆動制御装置である、
電動機駆動制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動機の駆動を制御する電動機駆動制御装置および電動機駆動制御方法に関する。そして、本発明は、前記電動機駆動制御装置を備える電動機駆動制御システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
電動機は、動力源として様々なシステムに用いられており、前記システムの用途に応じて適宜にその駆動が制御される。例えば、電動機の速度を制御する速度制御や、電動機の推力(出力トルク)を制御する推力制御(トルク制御)等がある。これら各制御方式間の相互移行では、制御方式自体を切り換えることが一般的であり、例えば、特許文献1に開示された技術がある。
【0003】
この特許文献1に開示されたモータ制御装置は、エンコーダを備えたモータを制御するモータ制御装置であって、前記モータによって駆動される機械負荷が加圧対象物に接近し、かつ、前記機械負荷の最終位置が前記加圧対象物の一定距離手前となるべき指令値である位置指令を生成する位置指令生成部と、前記エンコーダで検出された前記モータの位置が前記位置指令に追従するように第1の速度指令を出力する位置制御部と、前記加圧対象物に加えるべき圧力または力の指令値である圧力指令を生成する圧力指令生成部と、前記機械負荷が前記加圧対象物に押し当てられたときに、前記機械負荷で検出された圧力または力が前記圧力指令に追従するように第2の速度指令を出力する圧力制御部と、前記機械負荷が前記加圧対象物に接触する際の前記モータの速度の上限を規定するクリープ速度と、前記第1の速度指令と、前記第2の速度指令との何れか1つを選択し、前記モータが動作すべき速度指令として出力する速度指令選択部と、前記速度指令選択部が出力する速度指令に前記モータの速度が追従するように前記モータに電流を供給する電流指令を出力する速度制御部と、を備える。
【先行技術文献】
【特許文献】
【0004】
特許第6113378号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記特許文献1に開示されたモータ制御装置は、異なる複数の制御方式ごとに複数の制御部を備えるため、その構成が複雑になってしまっている。
【0006】
本発明は、上述の事情に鑑みて為された発明であり、その目的は、構成を簡素化できる電動機駆動制御装置および電動機駆動制御方法ならびに前記電動機駆動制御装置を備える電動機駆動制御システムを提供することである。
【課題を解決するための手段】
【0007】
本発明者は、種々検討した結果、上記目的は、以下の本発明により達成されることを見出した。すなわち、本発明の一態様にかかる電動機駆動制御装置は、インバータ回路の出力で駆動される電動機を制御する装置であって、複数の出力候補の中から所定の評価関数によって1つの出力候補を選択する選択部と、前記選択部で選択した出力候補を出力するように、前記インバータ回路を制御するインバータ制御部とを備え、前記評価関数は、互いに異なる複数の制御方式それぞれに対応した複数の制御方式対応項および複数の制御方式対応重み係数を含む関数であり、前記選択部は、制御方式を切り換える場合に、切り換え後の制御方式に対応する制御方式対応重み係数を、残余の制御方式に対応する制御方式対応重み係数より優位に設定する。
【0008】
このような電動機駆動制御装置は、評価関数の制御方式対応重み係数を変えることによって制御方式を切り換えるので、電動機を駆動するインバータ回路を制御するインバータ制御部の構成を簡素化でき、したがって、上記電動機駆動制御装置の構成が簡素化できる。
【0009】
他の一態様では、上述の電動機駆動制御装置において、前記選択部は、前記インバータ回路で出力可能な時系列な電圧パターンを、互いに異なるように複数、前記複数の出力候補として生成する電圧パターン生成部と、前記電圧パターン生成部で生成した複数の時系列な電圧パターンそれぞれについて、当該時系列な電圧パターンが前記電動機に入力された場合での、前記電動機における前記制御方式に応じた制御目的に関する所定の物理量の値を予測値として予測する予測部と、前記電圧パターン生成部で生成した複数の時系列な電圧パターンの中から、前記予測部で予測された前記電動機の各予測値の中で前記評価関数に基づく最も高い評価の予測値に対応する時系列な電圧パターンを前記1つの出力候補として選択する電圧パターン選択部とを備える。好ましくは、前記選択部は、前記インバータ回路で出力可能な時系列な電圧パターンを、互いに異なるように複数、前記複数の出力候補として生成する電圧パターン生成処理を実施する電圧パターン生成部と、前記電圧パターン生成部で生成した複数の時系列な電圧パターンそれぞれについて、当該時系列な電圧パターンが前記電動機に入力された場合での、前記電動機における前記制御方式に応じた制御目的に関する所定の物理量の値を予測値として予測する予測処理を実施する予測部と、前記電圧パターン生成部で生成した複数の時系列な電圧パターンの中から、前記予測部で予測された前記電動機の各予測値の中で前記評価関数に基づく最も高い評価の予測値に対応する時系列な電圧パターンを前記1つの出力候補として選択する電圧パターン選択処理を実施する電圧パターン選択部とを備え、前記インバータ制御部は、前記選択部で選択した出力候補を出力するように、前記インバータ回路を制御するインバータ制御処理を実施し、前記電動機駆動制御装置は、前記電圧パターン生成処理、前記予測処理、前記電圧パターン選択処理および前記インバータ制御処理を、前記電圧パターン生成部、前記予測部、前記電圧パターン選択部および前記インバータ制御部に、所定の制御周期で繰り返し実施させる繰返し制御部をさらに備える。
【0010】
このような電動機駆動制御装置は、有限時間における最適化を繰り返す、いわゆるモデル予測制御を用いるので、制御方式対応重み係数の切り換えにより電動機に生じる不連続な挙動の変化を回避または低減できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社コロナ
送風装置
6日前
個人
スイッチング電源回路
16日前
個人
共振を用いた整流回路
12日前
ニチコン株式会社
電源装置
18日前
個人
すだれ型の薄膜太陽光発電装置
18日前
ニデック株式会社
モータ
18日前
中国電力株式会社
給電装置
18日前
株式会社アイシン
ステータ
19日前
中国電力株式会社
変圧器取替工法
11日前
株式会社発明ラボックス
送受電システム
13日前
株式会社GSユアサ
無停電電源システム
13日前
株式会社豊田自動織機
電動機
6日前
トヨタ自動車株式会社
故障検出回路
13日前
トヨタ自動車株式会社
ステータコア
9日前
トヨタ自動車株式会社
故障検出回路
13日前
株式会社豊田自動織機
電動機
6日前
個人
基板使用によるコイル巻線との接続法
2日前
株式会社ミツバ
駆動装置
12日前
富士電機株式会社
電力変換装置
3日前
株式会社ミツバ
回転電機
16日前
トヨタ自動車株式会社
剥離装置
12日前
株式会社ダイヘン
電力システム
3日前
株式会社ミツバ
回転電機
6日前
株式会社ミツバ
駆動装置
12日前
株式会社ダイヘン
電圧調整装置
2日前
株式会社ミツバ
回転電機
19日前
富士電機株式会社
無停電電源装置
13日前
株式会社アイシン
軸受の支持構造
16日前
トヨタ自動車株式会社
発電支援システム
12日前
ニデック株式会社
コイル挿入装置
18日前
株式会社豊田自動織機
電動圧縮機
18日前
トヨタ自動車株式会社
回転電機のロータ
17日前
株式会社デンソー
制御装置
5日前
株式会社デンソー
電源装置
5日前
日立Astemo株式会社
駆動ユニット
16日前
株式会社デンソー
半導体装置
17日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ