TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024072015
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182583
出願日
2022-11-15
発明の名称
電動機
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
H02P
21/18 20160101AFI20240520BHJP(電力の発電,変換,配電)
要約
【課題】高調波重畳方式によって回転子の位置を推定する速度域が広くなることを抑制すること。
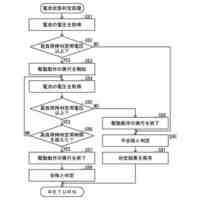
【解決手段】電動機は、制御部を備える。制御部は、位置推定部を備える。位置推定部は、モータが備える回転子の位置を推定する。制御部は、出力電圧が予め定められた閾値以上の場合、誘起電圧方式によって位置推定部に回転子の位置を推定させる。制御部は、出力電圧が閾値未満の場合、高調波重畳方式によって位置推定部に回転子の位置を推定させる。
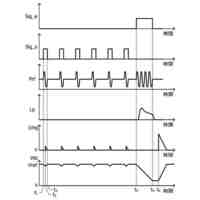
【選択図】図3
特許請求の範囲
【請求項1】
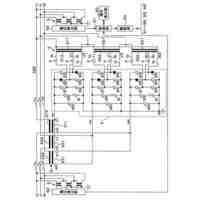
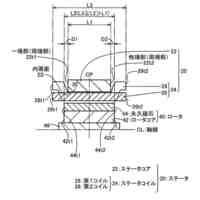
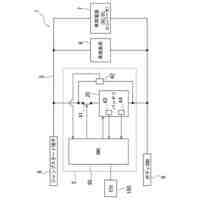
回転子及び3相のコイルが巻回された固定子を有するモータと、
ドライバーと、前記ドライバーによって駆動されるスイッチング素子と、を有し、前記スイッチング素子によって前記モータを駆動するインバータと、
前記インバータの出力電圧を検出する出力電圧検出部と、
前記スイッチング素子の制御に用いられる複数の指令値を算出し、前記スイッチング素子を制御する制御部と、を備え、
前記制御部は、
前記回転子の位置を推定する位置推定部を備え、
前記位置推定部は、
前記3相のコイルに発生する誘起電圧に基づき、前記回転子の位置を推定する誘起電圧方式と、
前記指令値に高調波を重畳させ、前記回転子の位置を推定する高調波重畳方式と、を有する電動機であって、
前記制御部は、
前記出力電圧が予め定められた閾値以上の場合、前記誘起電圧方式によって前記位置推定部に前記回転子の位置を推定させ、
前記出力電圧が前記閾値未満の場合、前記高調波重畳方式によって前記位置推定部に前記回転子の位置を推定させるように切り替えることを特徴とする電動機。
続きを表示(約 640 文字)
【請求項2】
前記制御部は、
前記回転子の位置の他に、前記回転子の回転速度を推定する前記位置推定部と、
相電流を前記回転子の位置に基づいてd軸電流及びq軸電流に変換する電流座標変換部と、
前記回転速度と、外部から入力される回転速度指令値との差分に基づいて、d軸電流指令値及びq軸電流指令値を算出する速度制御部と、
前記d軸電流と前記d軸電流指令値との差分に基づいてd軸電圧指令値を算出し、前記q軸電流と前記q軸電流指令値との差分に基づいてq軸電圧指令値を算出する電流制御部と、
前記d軸電圧指令値及び前記q軸電圧指令値に基づいて、3相分の3相電圧指令値を算出するPWM制御部と、を備え、
前記制御部は、前記高調波重畳方式において、前記d軸電圧指令値のみ、前記d軸電圧指令値及び前記q軸電圧指令値の両方、前記d軸電流指令値及び前記q軸電流指令値の両方、並びに、前記3相電圧指令値のみのうちのいずれかの指令値で定義される所定の指令値に、高調波を重畳させ、前記位置推定部に前記回転子の位置を推定させる請求項1に記載の電動機。
【請求項3】
前記閾値は、第1閾値と、前記第1閾値よりも低い第2閾値と、を有し、
前記制御部は、前記第1閾値を、前記高調波重畳方式から前記誘起電圧方式への切り替えに用い、前記第2閾値を、前記誘起電圧方式から前記高調波重畳方式への切り替えに用いる、請求項1又は請求項2に記載の電動機。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動機に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
インバータをセンサレス制御することによってモータを駆動する場合、モータの回転子の位置を推定する必要がある。センサレス制御は、回転子の位置をソフトウェアで推定することによってハードウェアの位置センサを用いずにモータを駆動する制御方式である。回転子の位置を推定する方式としては、例えば、誘起電圧方式、及び高調波重畳方式が挙げられる。誘起電圧方式は、モータの駆動によって発生する誘起電圧を用いることで回転子の位置を推定する方式である。高調波重畳方式は、モータへの電圧指令値又は電流指令値に高調波成分を重畳させることで回転子の位置を推定する方式である。
【0003】
モータの速度が低いほど誘起電圧は低い。このため、誘起電圧方式を用いる場合、モータの速度が低い場合に、回転子の位置の推定精度が低下する。特許文献1に開示の制御部は、モータの速度が閾値よりも低い場合、高調波重畳方式によって回転子の位置を推定する。これにより、モータの速度が閾値よりも低い場合に、位置推定精度が低下することを抑制している。
【先行技術文献】
【特許文献】
【0004】
特開2011-172324号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、モータの速度によって、高調波重畳方式によって回転子の位置を推定するか否かを切り替えている。誘起電圧は、モータの温度やモータが備える磁石の公差によっても変化する。このため、モータの速度によって、高調波重畳方式によって回転子の位置を推定するか否かを切り替える場合、これらの要因によるばらつきを加味して、閾値を大きめの値に設定する必要がある。すると、高調波重畳方式によって回転子の位置を推定する速度域が広くなる。高調波重畳方式によって回転子の位置を推定する場合、高調波を重畳することによって静音性が悪化するおそれがある。また、高調波電流の発生によってモータの効率が悪化するおそれがある。このため、高調波重畳方式によって回転子の位置を推定する速度域は、狭くすることが好ましい。
【課題を解決するための手段】
【0006】
上記課題を解決する電動機は、回転子及び3相のコイルが巻回された固定子を有するモータと、ドライバーと、前記ドライバーによって駆動されるスイッチング素子と、を有し、前記スイッチング素子によって前記モータを駆動するインバータと、前記インバータの出力電圧を検出する出力電圧検出部と、前記スイッチング素子の制御に用いられる複数の指令値を算出し、前記スイッチング素子を制御する制御部と、を備え、前記制御部は、前記回転子の位置を推定する位置推定部を備え、前記位置推定部は、前記3相のコイルに発生する誘起電圧に基づき、前記回転子の位置を推定する誘起電圧方式と、前記指令値に高調波を重畳させ、前記回転子の位置を推定する高調波重畳方式と、を有する電動機であって、前記制御部は、前記出力電圧が予め定められた閾値以上の場合、前記誘起電圧方式によって前記位置推定部に前記回転子の位置を推定させ、前記出力電圧が前記閾値未満の場合、前記高調波重畳方式によって前記位置推定部に前記回転子の位置を推定させるように切り替えることを要旨とする。
【0007】
制御部は、インバータの出力電圧が閾値未満の場合、高調波重畳方式によって位置推定部に回転子の位置を推定させる。インバータの出力電圧とモータに発生する誘起電圧には相関がある。インバータの出力電圧に閾値を設定することによって、モータの温度などを要因とする誘起電圧のばらつきを加味した閾値を設定する必要がない。従って、高調波重畳方式によって回転子の位置を推定する速度域が広くなることを抑制できる。
【0008】
上記電動機について、前記制御部は、前記回転子の位置の他に、前記回転子の回転速度を推定する位置推定部と、相電流を前記回転子の位置に基づいてd軸電流及びq軸電流に変換する電流座標変換部と、前記回転速度と、外部から入力される回転速度指令値との差分に基づいて、d軸電流指令値及びq軸電流指令値を算出する速度制御部と、前記d軸電流と前記d軸電流指令値との差分に基づいてd軸電圧指令値を算出し、前記q軸電流と前記q軸電流指令値との差分に基づいてq軸電圧指令値を算出する電流制御部と、前記d軸電圧指令値及び前記q軸電圧指令値に基づいて、3相分の3相電圧指令値を算出するPWM制御部と、を備え、前記制御部は、前記高調波重畳方式において、前記d軸電圧指令値のみ、前記d軸電圧指令値及び前記q軸電圧指令値の両方、前記d軸電流指令値及び前記q軸電流指令値の両方、並びに、前記3相電圧指令値のみのうちのいずれかの指令値で定義される所定の指令値に、高調波を重畳させ、前記位置推定部に前記回転子の位置を推定させてもよい。
【0009】
上記電動機について、前記閾値は、第1閾値と、前記第1閾値よりも低い第2閾値と、を有し、前記制御部は、前記第1閾値を、前記高調波重畳方式から前記誘起電圧方式への切り替えに用い、前記第2閾値を、前記誘起電圧方式から前記高調波重畳方式への切り替えに用いてもよい。
【発明の効果】
【0010】
本発明によれば、高調波重畳方式によって回転子の位置を推定する速度域が広くなることを抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
超音波振動体の支持方法
10日前
株式会社発明屋
太陽光発電装置
8日前
株式会社アイシン
回転電機
23日前
株式会社力電
電力システム
10日前
西芝電機株式会社
回転電機
23日前
株式会社LIMNO
充電装置
8日前
個人
チョッパ型双方向ACDCコンバータ
17日前
株式会社ダイヘン
電圧調整装置
18日前
トヨタ自動車株式会社
回転電機
17日前
ミネベアミツミ株式会社
モータ
23日前
株式会社デンソー
制御装置
23日前
株式会社豊田自動織機
電動圧縮機
18日前
住友重機械工業株式会社
レーザ電源装置
18日前
住友重機械工業株式会社
レーザ電源装置
18日前
矢崎総業株式会社
非接触給電装置
17日前
株式会社デンソー
半導体装置
3日前
株式会社明電舎
回転機
4日前
トヨタ自動車株式会社
コイル線の製造方法
19日前
株式会社GSユアサ
電源装置およびその組立方法
17日前
ダイハツ工業株式会社
車両用制御装置
4日前
東海電子株式会社
電子機器およびプログラム
19日前
株式会社デンソー
電力変換装置
18日前
マレリ株式会社
車両用電源装置
23日前
株式会社豊田自動織機
モータ制御装置
1日前
矢崎総業株式会社
電気接続箱
1日前
株式会社ダイフク
非接触給電設備
19日前
ニデック株式会社
駆動装置
17日前
群貿企業股ふん有限公司
モータ固定子接続構造
10日前
株式会社アイシン
車両用駆動装置
18日前
トヨタ自動車株式会社
永久磁石式電動機
17日前
日産自動車株式会社
電動車用インバータ
10日前
株式会社立基
管材接続具
18日前
ニデック株式会社
駆動装置
18日前
ニデック株式会社
駆動装置
18日前
東洋電機製造株式会社
電動機の回転子
19日前
東洋電機製造株式会社
車両用主電動機
9日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ