TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057930
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164927
出願日
2022-10-13
発明の名称
飛行体の高度算出方法、高度算出プログラム、及びそれを有する飛行体
出願人
株式会社日立製作所
代理人
青稜弁理士法人
主分類
G01S
11/06 20060101AFI20240418BHJP(測定;試験)
要約
【課題】
周囲に目印となる構造物がない場所や飛行体下方に他の飛行体がいる場所でも、追加の測定装置なしで正確な高度を算出できる、飛行体の高度算出方法、高度算出プログラム、及びそれを有する飛行体を提供する。
【解決手段】
飛行体の高度算出方法であって、飛行体の水平座標の情報と、無線信号の受信信号強度と、あらかじめ入手した高度算出補助情報を用いて、飛行体の高度を算出する。
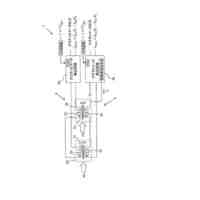
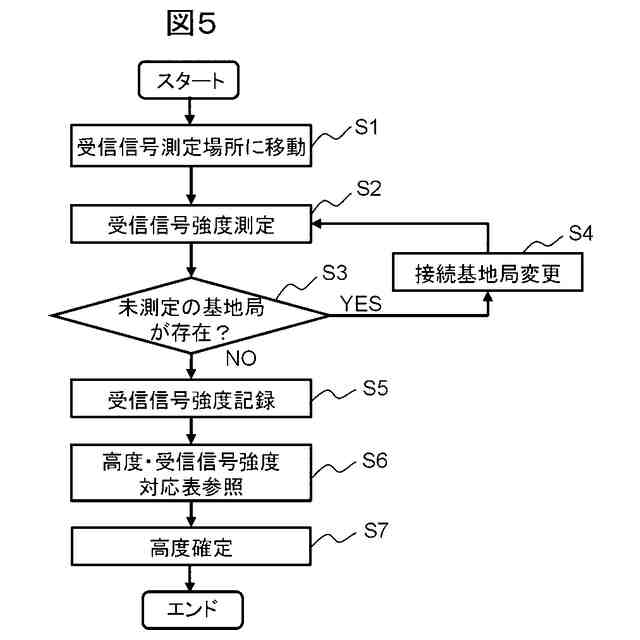
【選択図】図5
特許請求の範囲
【請求項1】
飛行体の高度算出方法であって、
前記飛行体の水平座標の情報と、無線信号の受信信号強度と、あらかじめ入手した高度算出補助情報を用いて、前記飛行体の高度を算出することを特徴とする高度算出方法。
続きを表示(約 2,600 文字)
【請求項2】
請求項1に記載の高度算出方法において、
前記高度算出補助情報は、特定の水平座標位置における高度と受信信号強度の対応情報であって、
前記飛行体の水平座標の情報を用いて前記飛行体を前記特定の水平座標位置に移動させ、
該特定の水平座標位置において前記無線信号の受信信号強度を測定し、
該特定の水平座標位置における受信信号強度と、前記高度と受信信号強度の対応情報から前記飛行体の高度を算出することを特徴とする高度算出方法。
【請求項3】
請求項1に記載の高度算出方法において、
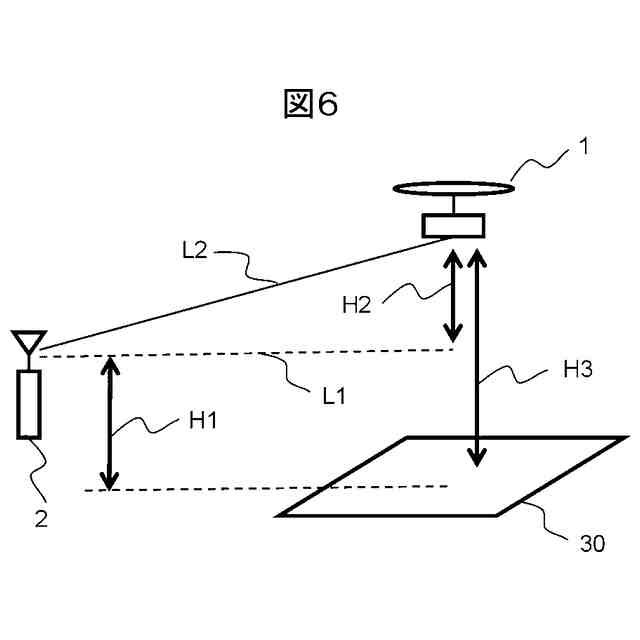
前記高度算出補助情報は、前記飛行体が受信可能な無線基地局の水平座標及び高度の位置情報と送信電力に関する情報であって、
前記無線基地局と無線通信を行い、該無線通信の受信信号強度と該無線通信を行った前記無線基地局の送信電力から前記無線基地局と前記飛行体との直線距離を算出し、
前記飛行体の位置算出装置から得られた飛行体の水平座標と前記無線基地局の水平座標の位置情報から前記飛行体と前記無線基地局の水平距離を算出し、
前記直線距離と前記水平距離から前記無線基地局と前記飛行体の高度差を算出し、
前記高度差と前記無線基地局の高度の位置情報から前記飛行体の高度を算出することを特徴とする高度算出方法。
【請求項4】
請求項1に記載の高度算出方法において、
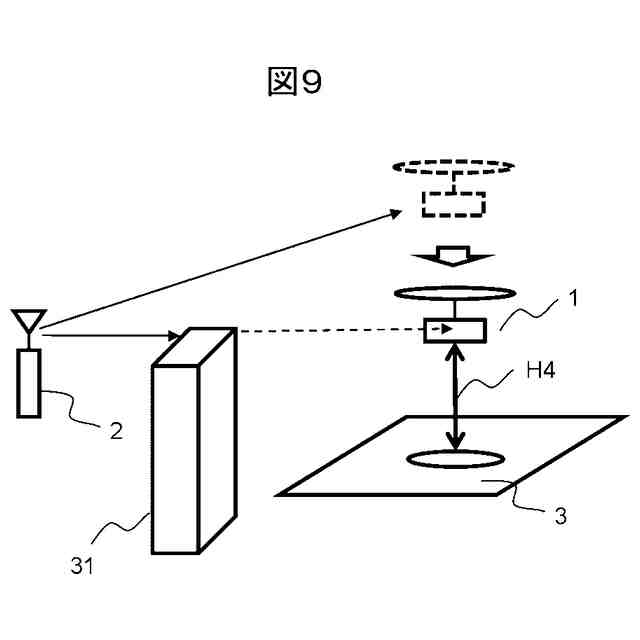
前記高度算出補助情報は、特定の水平座標位置における受信信号強度が変化する変化高度とその変化量の対応情報であって、
前記飛行体の水平座標の情報を用いて前記飛行体を前記特定の水平座標位置に移動させ、
該特定の水平座標位置において、前記飛行体の高度の変化に対する前記無線信号の受信信号強度を測定し、該測定した受信信号強度の変化量が前記対応情報の変化量を超えるとき、該変化量に対する前記対応情報の前記変化高度から前記飛行体の高度を算出することを特徴とする高度算出方法。
【請求項5】
請求項1に記載の高度算出方法において、
前記高度算出補助情報は、特定の水平座標位置における高度の変化量と受信信号強度の変化量の関係を示す対応情報であって、
前記飛行体の水平座標の情報を用いて前記飛行体を前記特定の水平座標位置に移動させ、
特定の水平座標位置において、前記飛行体の高度の変化に対する前記無線信号の受信信号強度を測定し、該測定した高度の変化に対する前記無線信号の受信信号強度の変化量に基づいて前記対応情報を参照し、前記受信信号強度が変化する高度変化から前記飛行体の高度を算出することを特徴とする高度算出方法。
【請求項6】
移動を行うための推進装置と外部との通信を行う通信装置と記憶装置と制御装置を有する飛行体であって、
前記記憶装置はあらかじめ入手した高度算出補助情報を記憶しており、
前記制御装置は、前記推進装置を制御して飛行体を移動し、移動時の飛行体の水平座標の情報を算出し、前記通信装置を用いて無線信号の受信信号強度を測定し、前記飛行体の水平座標の情報と、前記無線信号の受信信号強度と、前記記憶装置から読みだした高度算出補助情報を用いて、飛行体の高度を算出することを特徴とする飛行体。
【請求項7】
請求項6に記載の飛行体において、
前記高度算出補助情報は、特定の水平座標位置における高度と受信信号強度の対応情報であって、
前記制御装置は、前記飛行体の水平座標の情報を用いて、前記推進装置を制御して飛行体を前記特定の水平座標位置に移動させ、
該特定の水平座標位置において前記通信装置を用いて前記無線信号の受信信号強度を測定し、
該特定の水平座標位置における受信信号強度と、前記高度と受信信号強度の対応情報から飛行体の高度を算出することを特徴とする飛行体。
【請求項8】
請求項6に記載の飛行体において、
前記高度算出補助情報は、前記飛行体が受信可能な無線基地局の水平座標及び高度の位置情報と送信電力に関する情報であって、
前記制御装置は、
前記通信装置を用いて前記無線基地局と無線通信を行い、該無線通信の受信信号強度と該無線通信を行った前記無線基地局の送信電力から前記無線基地局と前記飛行体との直線距離を算出し、
前記飛行体の位置算出装置から得られた飛行体の水平座標と前記無線基地局の水平座標の位置情報から前記飛行体と前記無線基地局の水平距離を算出し、
前記直線距離と前記水平距離から前記無線基地局と前記飛行体の高度差を算出し、
前記高度差と前記無線基地局の高度の位置情報から飛行体の高度を算出することを特徴とする飛行体。
【請求項9】
請求項6に記載の飛行体において、
前記高度算出補助情報は、特定の水平座標位置における受信信号強度が変化する変化高度とその変化量の対応情報であって、
前記制御装置は、
前記飛行体の水平座標の情報を用いて前記推進装置を制御して飛行体を前記特定の水平座標位置に移動させ、
該特定の水平座標位置において、前記通信装置を用いて飛行体の高度の変化に対する前記無線信号の受信信号強度を測定し、該測定した受信信号強度の変化量が前記対応情報の変化量を超えるとき、該変化量に対する前記対応情報の前記変化高度から飛行体の高度を算出することを特徴とする飛行体。
【請求項10】
請求項6に記載の飛行体において、
前記高度算出補助情報は、特定の水平座標位置における高度の変化量と受信信号強度の変化量の関係を示す対応情報であって、
前記制御装置は、
前記飛行体の水平座標の情報を用いて前記推進装置を制御して飛行体を前記特定の水平座標位置に移動させ、
該特定の水平座標位置において、前記通信装置を用いて前記飛行体の高度の変化に対する前記無線信号の受信信号強度を測定し、該測定した高度の変化に対する前記無線信号の受信信号強度の変化量に基づいて前記対応情報を参照し、前記受信信号強度が変化する高度変化から飛行体の高度を算出することを特徴とする飛行体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行体の高度算出技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年の労働人口の減少、脱炭素化などの社会課題に対応し、モビリティの分野でも多様多段化が求められている。特にドローン技術の発展に伴い、物流や近距離・中距離移動のためのエアモビリティへの需要が高まっており、飛行体の自動化(無人化)、高速化による経済活動の3D化は今後の持続的発展にとって欠かせない技術となる見込みである。
【0003】
飛行体の自動化のためには現在位置の正確な特定が不可欠であり、GNSS(Global Navigation Satellite System)などの衛星測位に加え、飛行体に搭載されたカメラからの映像から該当する位置を探索するパターンマッチング技術など様々な手法が検討されている。飛行体高度についてもGNSS測位に加え、気圧計による高度計測が可能な飛行体も多い。しかしGNSSは位置算出に衛星を用いている都合上、水平方向には高い精度で座標を算出できるが、垂直方向の座標には誤差が出やすいという問題がある。また高度による気圧の変化量は大きくないため、気圧計では精密な高度を測定することは困難である。
【0004】
これに対して、本技術分野における背景技術として特許文献1がある。特許文献1では、飛行体に搭載したカメラから周囲の画像を撮影し、目印となる構造物を基準として、飛行体の飛行位置をより高精度に推定する点が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-212204号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載のように、カメラからの撮像画像をもとに、目印となる構造物を基準として正確な高度を推定することが考えられる。しかしながら、エアモビリティなどの市街地で飛行体を運行する場合、その発着ポートはビルの屋上などに設置されることが想定される。この場合、発着ポートとなるビルよりも高いビルが周囲になければ、高度の目印となる構造物などが存在しないため、パターンマッチングによる高度の推定ができず正確な高度が得られない。
【0007】
一方、高度計測として、レーザ測距計を用いて地上までの距離を測定する方法がある。ここで、エアモビリティは多数の飛行体が同時に運用される可能性があるため、離着陸時には複数の飛行体が発着ポート上空で待機している場合が想定される。この場合、飛行体より下方に他の飛行体がいるとそれに遮られてレーザ測距計で高度を測定することができない。またレーザ測距計などの高度測定のための機器を追加すると機体重量やコストの面でも負担が生じる。
【0008】
本発明は、上記課題に鑑み、周囲に目印となる構造物がない場所や飛行体下方に他の飛行体がいる場所でも、追加の測定装置なしで正確な高度を算出できる、飛行体の高度算出方法、高度算出プログラム、及びそれを有する飛行体を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、その一例を挙げるならば、飛行体の高度算出方法であって、飛行体の水平座標の情報と、無線信号の受信信号強度と、あらかじめ入手した高度算出補助情報を用いて、飛行体の高度を算出する。
【発明の効果】
【0010】
本発明によれば、周囲に目印となる構造物がない場所や飛行体下方に他の飛行体がいる場所でも追加の測定装置なしで正確な高度が算出できる、飛行体の高度算出方法、高度算出プログラム、及びそれを有する飛行体を提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
25日前
株式会社CCT
表示装置
24日前
株式会社トプコン
測量装置
1か月前
株式会社チノー
放射温度計
17日前
日本精機株式会社
センサユニット
16日前
個人
コンベックスルール用測定部品
23日前
トヨタ自動車株式会社
給水治具
22日前
株式会社テイエルブイ
処理装置
10日前
大和製衡株式会社
組合せ計量装置
15日前
TDK株式会社
ガスセンサ
8日前
東将精工株式会社
測定器具補助具
24日前
大和製衡株式会社
組合せ計量装置
15日前
大和製衡株式会社
組合せ計量装置
15日前
株式会社ミツトヨ
光学式エンコーダ
25日前
三菱マテリアル株式会社
温度センサ
22日前
東レエンジニアリング株式会社
衝撃試験機
25日前
ニプロ株式会社
粉体検査装置
1日前
中部電力株式会社
スミヤ濾紙
1か月前
豊田合成株式会社
重量測定装置
22日前
株式会社ティアンドデイ
温度測定装置
22日前
トヨタ自動車株式会社
表示装置
16日前
太陽誘電株式会社
匂いセンサシステム
8日前
東レ株式会社
センサー素子及びガスセンサー
29日前
住友金属鉱山株式会社
検査装置
15日前
ニシム電子工業株式会社
液位検出装置
16日前
住友金属鉱山株式会社
セレン評価方法
15日前
日立建機株式会社
作業機械
29日前
株式会社 システムスクエア
検査装置
24日前
マグネデザイン株式会社
GSR素子の製造方法
10日前
帝国通信工業株式会社
感圧センサ
3日前
笹田磁気計測研究所株式会社
磁気傾度計
17日前
帝国通信工業株式会社
感圧センサ
3日前
株式会社ダイナックス
電流検出器
15日前
株式会社不二越
歯車寸法測定装置
24日前
矢崎総業株式会社
電流センサ
1日前
マグネデザイン株式会社
磁界検出素子の製造方法
10日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ