TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057840
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164786
出願日
2022-10-13
発明の名称
車両の制御方法
出願人
THK株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
主分類
H02J
50/90 20160101AFI20240418BHJP(電力の発電,変換,配電)
要約
【課題】給電レーンを車両が走行する場合に、高い充電効率を維持することができる車両の制御方法を提供する。
【解決手段】走行中に走行路に送電手段が埋設された給電レーンを走行することにより、当該給電レーンから非接触でエネルギーの供給を受ける車両の制御方法であって、前記給電レーンにおいて、給電効率が高くなるように前記車両の受電装置の位置を調整する受電装置位置設定工程を有する。
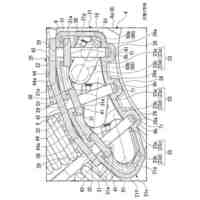
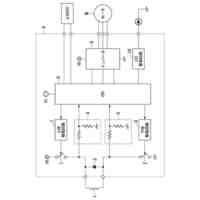
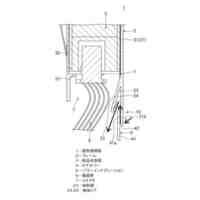
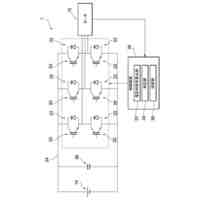
【選択図】図4
特許請求の範囲
【請求項1】
走行中に走行路に送電手段が埋設された給電レーンを走行することにより、当該給電レーンから非接触でエネルギーの供給を受ける車両の制御方法であって、
前記給電レーンにおいて、給電効率が高くなるように前記車両の受電装置の位置を調整する受電装置位置設定工程を有することを特徴とする車両の制御方法。
続きを表示(約 720 文字)
【請求項2】
請求項1に記載の車両の制御方法において、
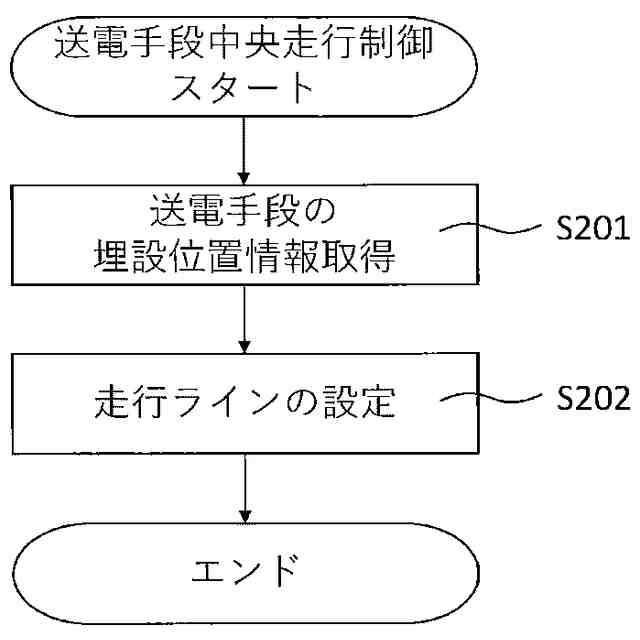
前記受電装置位置設定工程は、前記送電手段の埋設位置を取得する埋設位置取得工程を有し、
前記埋設位置に沿って自車の走行ラインを設定することを特徴とする車両の制御方法。
【請求項3】
請求項1に記載の車両の制御方法において、
前記受電装置位置設定工程は、先行して走行する先行車から給電効率に関する情報を取得する給電効率情報取得手段を有し、
当該先行車の給電効率情報に沿って自車の走行ラインを設定することを特徴とする車両の制御方法。
【請求項4】
請求項1から3の何れか1項に記載の車両の制御方法において、
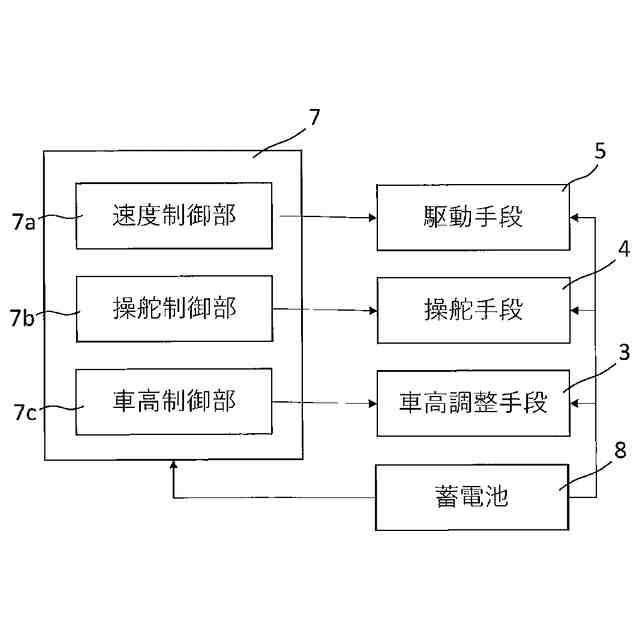
蓄電池の充電状態に応じて車両の速度制御を行う速度制御工程を更に有することを特徴とする車両の制御方法。
【請求項5】
請求項4に記載の車両の制御方法において、
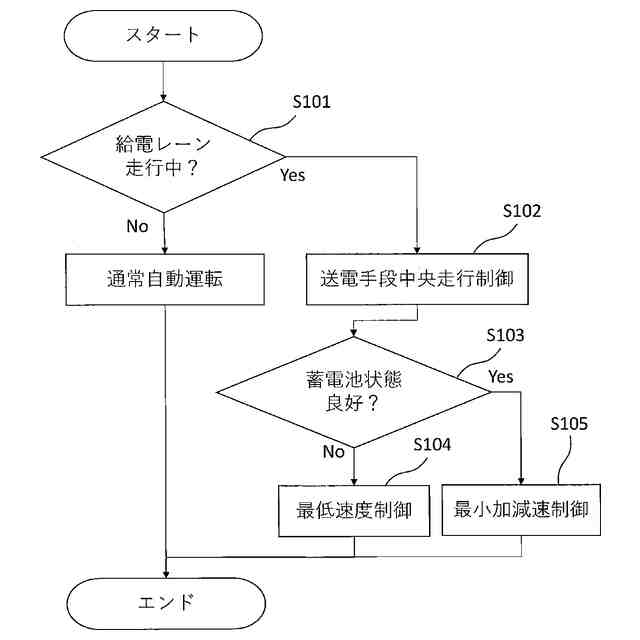
前記速度制御工程は、前記蓄電池の充電状態が良好の場合には、加減速が最小となるように速度制御を行う最小加減速制御を行うことを特徴とする車両の制御方法。
【請求項6】
請求項4に記載の車両の制御方法において、
前記速度制御工程は、前記蓄電池の充電状態が良好でない場合には、速度を落とした最低速度制御を行うことを特徴とする車両の制御方法。
【請求項7】
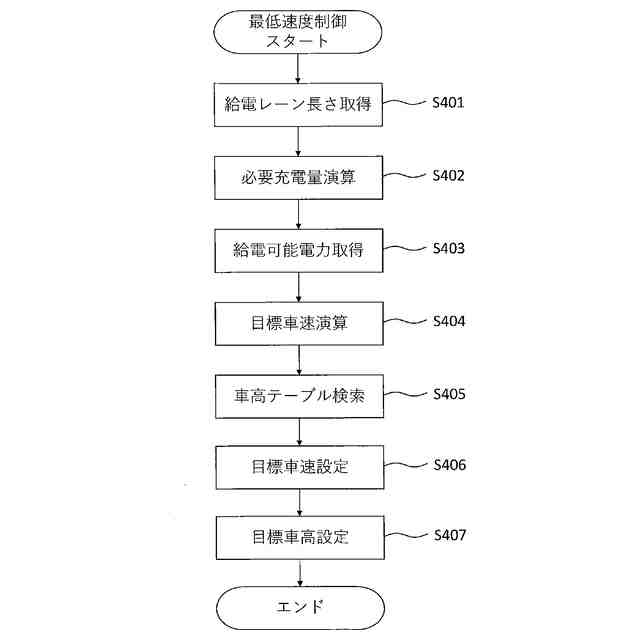
請求項6に記載の車両の制御方法において、
前記最低速度制御は、前記給電レーンの長さ、前記蓄電池の必要充電量及び前記給電レーンからの給電可能な電力から目標車速を演算し、当該目標車速に応じた車高調整を行うことを特徴とする車両の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御方法に関し、特に、給電レーンを走行する車両の制御方法及び制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
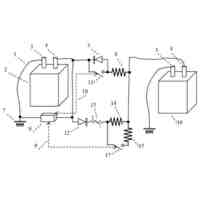
従来、電動車両などの蓄電池に蓄えられた電力によってモータを駆動する車両では、蓄電池の充電は、充電器を用いて有線で接続することで行っている。しかし、近年では、道路に送電手段などを埋設した給電レーンを設け、送電手段と対応する受電手段を備えた車両が当該給電レーンを走行することで、非接触で充電を行うことが検討されている。
【0003】
このような非接触での充電方法は、種々の方法が知られており、例えば、特許文献1に示すように、電動車両の制御装置であって、電動車両は、非接触給電が可能な走路である給電レーンを走行しながら、供給された電力を蓄電池に蓄えるように構成されており、電動車両が給電レーンの出口に到達した時点における、蓄電池の蓄電量についての目標値、である出口目標蓄電量を予め設定する目標設定部と、電動車両の車速を制御する車速制御部とを備え、車速制御部は、電動車両が出口に到達した時点における蓄電量が出口目標蓄電量となるように、車速を制御している。
【0004】
このような充電方法によれば、自動運転によって車両の車速を適切な速度に制御することができるので、給電レーンを走行する電動車両への充電を適切に行うことが可能となる。
【先行技術文献】
【特許文献】
【0005】
特開2019-68500号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
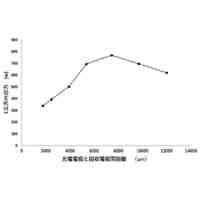
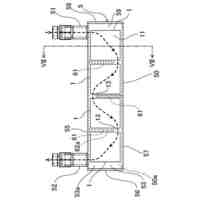
しかし、従来の非接触充電方法によると、送電手段の中心部分を受電装置が通るように走行すると充電効率が最も良くなるところ、道路や地面に埋設された送電手段の埋没位置が一直線上に精密に配置されておらず、即ち、道路等に埋設された複数の送電手段の埋設位置が車線に対して車幅方向にずれて配置され、精密な位置関係では配置されていないという実際の状況を考慮しておらず、このような状況において、充電に最適な走行制御を行うことができていないという課題が存在した。
【0007】
また、従来の非接触充電方法によると、給電レーンの出口における蓄電量が出口目標蓄電量となるように設定するものの、給電レーンの入り口における蓄電池の充電状況を考慮しておらず、車速の制御のみを行っているため、給電レーンの走行時に十分な充電量である場合には、電力消費効率の良い走行を行うことについて考慮されていなかった。
【0008】
また、従来の非接触充電方法は、給電レーンの渋滞などを考慮していないため、渋滞に起因する加減速による電力ロスが生じるなど、充電効率が良くない場合があった。
【0009】
本発明は、上記課題を解決するために成されたものであって、給電レーンを車両が走行する場合に、高い充電効率を維持することができる車両の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決する本発明に係る車両の制御方法は、走行中に走行路に送電手段が埋設された給電レーンを走行することにより、当該給電レーンから非接触でエネルギーの供給を受ける車両の制御方法であって、前記給電レーンにおいて、給電効率が高くなるように前記車両の受電装置の位置を調整する受電装置位置設定工程を有することを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
11日前
ニデック株式会社
モータ
今日
株式会社ダイヘン
電源装置
今日
個人
バッテリーの補助装置
19日前
個人
磁力のみを動力とするモーター
20日前
日産自動車株式会社
ロータ
今日
日産自動車株式会社
発電装置
19日前
トヨタ自動車株式会社
モータ
5日前
株式会社ミツバ
回転電機
6日前
株式会社ミツバ
回転電機
19日前
株式会社ミツバ
回転電機
19日前
株式会社ミツバ
制動装置
12日前
オムロン株式会社
電力変換装置
12日前
株式会社ミツバ
駆動装置
今日
個人
非対称鏡像力駆動型の静電発電機
7日前
富士電機株式会社
電力変換装置
7日前
ヴィガラクス株式会社
電気供給システム
13日前
富士電機株式会社
半導体モジュール
12日前
個人
超電導ロータリー式発電原動機
12日前
矢崎総業株式会社
電気接続箱
13日前
株式会社ダイヘン
双方向コンバータ
6日前
ニチコン株式会社
電源装置
19日前
学校法人金沢工業大学
レクテナ装置
今日
日本発條株式会社
ケーブルの止水構造
今日
トヨタ自動車株式会社
駆動装置
13日前
株式会社日立製作所
電気機器
19日前
株式会社日立製作所
電気機器
19日前
株式会社デンソー
電力変換装置
13日前
ニデック株式会社
モータ及びモータの組み立て方法
今日
株式会社デンソー
電力変換装置
13日前
株式会社ダイフク
非接触給電設備
13日前
住友電装株式会社
配線部材
14日前
株式会社ダイヘン
送電装置及び送電方法
今日
ボーンズ株式会社
放電回路
19日前
株式会社テイエルブイ
発電装置
13日前
ダイハツ工業株式会社
グロメット
12日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ