TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024056305
公報種別
公開特許公報(A)
公開日
2024-04-23
出願番号
2022163095
出願日
2022-10-11
発明の名称
電気モータ制御装置
出願人
株式会社アドヴィックス
代理人
個人
,
個人
主分類
H02P
21/05 20060101AFI20240416BHJP(電力の発電,変換,配電)
要約
【課題】電気モータの制御精度を高くすること。
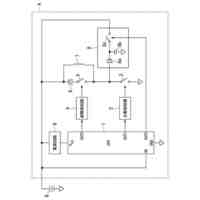
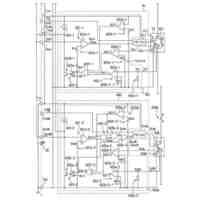
【解決手段】制御装置は、電気モータの目標速度ωrを、電気モータが出力可能な範囲内で要求値に応じて導出する目標速度導出部と、d軸電圧指令値Vdcおよびq軸電圧指令値Vqcを、U相指令電圧VU*、V相指令電圧VV*およびW相指令電圧VW*に変換する変換処理を実行する指令値変換部85と、変換処理の実行タイミングと、変換処理によって導出された指令値VU*,VV*,VW*に基づいてインバータが動作するタイミングと、の時差に起因した回転位置のずれ量の補正を、目標速度ωrに基づいて行う回転位置補正部81とを備えている。指令値変換部85は、回転位置補正部81によって補正された回転位置θe(n+1)を用いて変換処理を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
電気モータの出力に対する要求値および当該電気モータの複数相のコイルにインバータから供給された電流に基づいて、当該複数相のコイルに対する指令値を生成し、当該指令値に基づいて前記インバータを動作させることにより、前記電気モータを制御する電気モータ制御装置であって、
前記電気モータの回転速度の目標である目標速度を、前記電気モータが出力可能な範囲内で前記要求値に応じて導出する目標速度導出部と、
ベクトル制御の回転座標の電圧ベクトルの第1軸の成分の電圧の指令値である第1軸成分の電圧の指令値、および、前記第1軸と直交する第2軸の成分の電圧の指令値である第2軸成分の電圧の指令値を、前記電気モータの回転位置に基づいて、前記複数相のコイルに対する前記指令値に変換する変換処理を実行する指令値変換部と、
前記変換処理の実行タイミングと、当該変換処理によって導出された前記指令値に基づいて前記インバータが動作するタイミングと、の時差に起因した前記電気モータの回転位置のずれ量の補正を、前記目標速度に基づいて行う回転位置補正部と、を備え、
前記指令値変換部は、前記回転位置補正部によって補正された前記回転位置を用いて前記変換処理を実行する
電気モータ制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記電気モータの回転速度の検出値または推定値を取得する取得部を備え、
前記回転位置補正部は、
前記要求値の変化速度が所定の変化速度判定値未満である場合には、前記時差に起因した前記電気モータの回転位置のずれ量の補正を、前記目標速度を用いて行い、
前記要求値の変化速度が前記変化速度判定値以上である場合には、前記時差に起因した前記電気モータの回転位置のずれ量の補正を、前記取得部によって取得された前記検出値または前記推定値を用いて行う
請求項1に記載の電気モータ制御装置。
【請求項3】
前記第1軸成分の電流によって発生する前記第2軸上の干渉電圧を相殺するための第2軸干渉電圧補償値および前記第2軸成分の電流によって発生する前記第1軸上の干渉電圧を相殺するための第1軸干渉電圧補償値を、前記目標速度に基づいて導出する非干渉電圧導出部と、
前記要求値に基づいた前記第1軸成分の電圧の指令値を前記第1軸干渉電圧補償値で補正することによって第1軸電圧指令値を導出し、前記要求値に基づいた前記第2軸成分の電圧の指令値を前記第2軸干渉電圧補償値で補正することによって第2軸電圧指令値を導出する指令値補正部と、を備え、
前記指令値変換部は、前記変換処理において、前記指令値補正部によって導出された前記第1軸電圧指令値および前記第2軸電圧指令値を、前記電気モータの回転位置に基づいて、前記複数相のコイルに対する前記指令値に変換する
請求項1に記載の電気モータ制御装置。
【請求項4】
電気モータの出力に対する要求値および当該電気モータの複数相のコイルにインバータから供給された電流に基づいて、当該複数相のコイルに対する指令値を生成し、当該指令値に基づいて前記インバータを動作させることにより、前記電気モータを制御する電気モータ制御装置であって、
前記電気モータの回転速度の目標である目標速度を、前記電気モータが出力可能な範囲内で前記要求値に応じて導出する目標速度導出部と、
ベクトル制御の回転座標の電流ベクトルの第1軸の成分の電流である第1軸成分の電流によって発生する前記第1軸と直交する第2軸上の干渉電圧を相殺するための第2軸干渉電圧補償値と、前記第2軸の成分の電流である第2軸成分の電流によって発生する前記第1軸上の干渉電圧を相殺するための第1軸干渉電圧補償値とを、前記目標速度に基づいて導出する非干渉電圧導出部と、を備え、
前記第1軸干渉電圧補償値および前記第2軸干渉電圧補償値に基づいて、前記電気モータを制御する
電気モータ制御装置。
【請求項5】
前記電気モータの回転速度の検出値または推定値を取得する取得部を備え、
前記非干渉電圧導出部は、
前記要求値の変化速度が所定の変化速度判定値未満である場合には、前記第1軸干渉電圧補償値および前記第2軸干渉電圧補償値を前記目標速度に基づいて導出し、
前記要求値の変化速度が前記変化速度判定値以上である場合には、前記第1軸干渉電圧補償値および前記第2軸干渉電圧補償値を、前記取得部によって取得された前記検出値または前記推定値に基づいて導出する
請求項3または請求項4に記載の電気モータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電気モータを制御する電気モータ制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1は、3相(U相、V相、W相)のコイルを有する同期モータを駆動させるモータ制御装置を開示している。当該制御装置は、ベクトル制御の回転座標のd軸の電圧の指令値およびq軸の電圧の指令値を、同期モータの回転位置に基づいて、U相の電圧指令値、V相の電圧指令値およびW相の電圧指令値に変換する。そして、各相の電圧指令値に基づいてインバータが動作することにより、同期モータが駆動する。
【先行技術文献】
【特許文献】
【0003】
特開2009-254117号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同期モータの回転位置を取得する手法としては、同期モータの回転位置を検出する回転角センサの検出信号に基づいて回転位置を検出する手法、および、拡張誘起電圧方式を利用して回転位置を推定する手法などが知られている。
【0005】
しかしながら、回転角センサの検出精度が低い場合では、回転位置の検出値が実値と乖離するおそれがある。また、拡張誘起電圧方式を利用して回転位置を推定する場合も、同期モータを低速で駆動させていると、回転位置の推定精度が悪化するおそれがある。このように回転位置の検出値が実値と乖離したり、回転位置の推定精度が悪化したりすると、回転位置の検出値や推定値の精度が低いことが各相の電圧指令値に影響するため、同期モータの制御精度が悪化するおそれがある。
【課題を解決するための手段】
【0006】
上記課題を解決するための電気モータ制御装置は、電気モータの出力に対する要求値および当該電気モータの複数相のコイルにインバータから供給された電流に基づいて、当該複数相のコイルに対する指令値を生成し、当該指令値に基づいて前記インバータを動作させることにより、前記電気モータを制御する装置である。この電気モータ制御装置は、前記電気モータの回転速度の目標である目標速度を、前記電気モータが出力可能な範囲内で前記要求値に応じて導出する目標速度導出部と、ベクトル制御の回転座標の電圧ベクトルの第1軸の成分の電圧の指令値である第1軸成分の電圧の指令値、および、前記第1軸と直交する第2軸の成分の電圧の指令値である第2軸成分の電圧の指令値を、前記電気モータの回転位置に基づいて、前記複数相のコイルに対する前記指令値に変換する変換処理を実行する指令値変換部と、前記変換処理の実行タイミングと、当該変換処理によって導出された前記指令値に基づいて前記インバータが動作するタイミングと、の時差に起因した前記電気モータの回転位置のずれ量の補正を、前記目標速度に基づいて行う回転位置補正部と、を備えている。前記指令値変換部は、前記回転位置補正部によって補正された前記回転位置を用いて前記変換処理を実行する。
【0007】
変換処理では、電気モータの回転位置に基づいて、第1軸成分の電圧の指令値および第2軸成分の電圧の指令値が、電気モータの複数相のコイルに対応する指令値に変換される。変換処理によって導出された指令値に基づいてインバータが動作することにより、電気モータが駆動する。そのため、変換処理の実行タイミングと、変換処理によって導出された指令値に基づいてインバータが動作するタイミングとの間に所定の時差が発生する。変換処理においては、当該時差を考慮して補正された電気モータの回転位置を用いて、指令値の変換を行うことが好ましい。
【0008】
ここで、時差に応じた電気モータの回転位置の補正は、電気モータの回転速度を用いて行うことができる。一般的に、当該回転速度として、電気モータの回転位置を検出するセンサの検出値を時間微分した値、または、拡張誘起電圧方式を利用して導出した回転速度の推定値を用いる。この場合、当該検出値や推定値の精度が悪いと、当該回転速度の検出値や推定値が、電気モータの回転速度の実値から乖離しているおそれがある。したがって、このような回転速度を用いて電気モータの回転位置を補正しても、その補正の精度が高いとは言いがたい。
【0009】
そこで、上記電気モータ制御装置は、時差に応じて電気モータの回転位置を補正する場合、上記の目標速度が用いられる。当該目標速度は、電気モータの出力に対する要求値に応じて導出されたものである。そのため、回転位置の検出値や推定値の精度が悪い場合であっても、当該目標速度はそうした影響を受けない。その結果、当該目標速度は、電気モータの回転速度の実値から乖離しにくい。これにより、当該目標速度を用いて電気モータの回転位置を補正することにより、その補正を精度良く行うことができる。
【0010】
したがって、上記電気モータ制御装置によれば、電気モータの制御精度を高くできる。
上記課題を解決するための電気モータ制御装置は、電気モータの出力に対する要求値および当該電気モータの複数相のコイルにインバータから供給された電流に基づいて、当該複数相のコイルに対する指令値を生成し、当該指令値に基づいて前記インバータを動作させることにより、前記電気モータを制御する装置である。この電気モータ制御装置は、前記電気モータの回転速度の目標である目標速度を、前記電気モータが出力可能な範囲内で前記要求値に応じて導出する目標速度導出部と、ベクトル制御の回転座標の電流ベクトルの第1軸の成分の電流である第1軸成分の電流によって発生する前記第1軸と直交する第2軸上の干渉電圧を相殺するための第2軸干渉電圧補償値と、前記第2軸の成分の電流である第2軸成分の電流によって発生する前記第1軸上の干渉電圧を相殺するための第1軸干渉電圧補償値とを、前記目標速度に基づいて導出する非干渉電圧導出部と、を備えている。そして、電気モータ制御装置は、前記第1軸干渉電圧補償値および前記第2軸干渉電圧補償値に基づいて、前記電気モータを制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
8日前
ニデック株式会社
モータ
23日前
個人
バッテリーの補助装置
16日前
ヨツギ株式会社
鳥害防止具
24日前
株式会社プロテリアル
リニアモータ
24日前
個人
磁力のみを動力とするモーター
17日前
株式会社アイドゥス企画
モータシリンダ
23日前
日産自動車株式会社
発電装置
16日前
トヨタ自動車株式会社
モータ
2日前
オムロン株式会社
電力変換装置
9日前
株式会社ミツバ
制動装置
9日前
個人
非対称鏡像力駆動型の静電発電機
4日前
富士電機株式会社
電力変換装置
4日前
株式会社ミツバ
回転電機
3日前
株式会社ミツバ
回転電機
16日前
株式会社ミツバ
回転電機
16日前
ブラザー工業株式会社
制御装置
23日前
住友電装株式会社
ワイヤハーネス
24日前
ヴィガラクス株式会社
電気供給システム
10日前
ニチコン株式会社
電源装置
16日前
矢崎総業株式会社
電気接続箱
10日前
富士電機株式会社
半導体モジュール
9日前
個人
超電導ロータリー式発電原動機
9日前
株式会社ダイヘン
双方向コンバータ
3日前
トヨタ自動車株式会社
駆動装置
10日前
株式会社日立製作所
電気機器
16日前
株式会社アイシン
熱電発電装置
24日前
大阪瓦斯株式会社
電力調達装置
23日前
株式会社日立製作所
電気機器
16日前
株式会社デンソー
電力変換装置
10日前
株式会社デンソー
電力変換装置
10日前
トヨタ紡織株式会社
ロータの製造方法
17日前
ニデック株式会社
駆動装置
23日前
ニデック株式会社
駆動装置
23日前
ニデック株式会社
駆動装置
23日前
株式会社プロテリアル
ヨーク組立体及びリニアモータ
24日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ