TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055417
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162336
出願日
2022-10-07
発明の名称
振動型アクチュエータの駆動装置及びその駆動方法
出願人
キヤノン株式会社
代理人
個人
主分類
H02N
2/14 20060101AFI20240411BHJP(電力の発電,変換,配電)
要約
【課題】振動体と移動体を備える振動型アクチュエータにおいて、移動体の移動方向が反転する領域でも振動体の振動状態を適正に検出することが可能な仕組みを提供する。
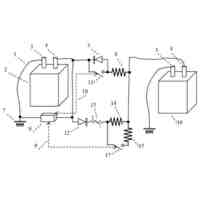
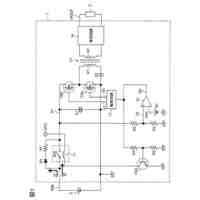
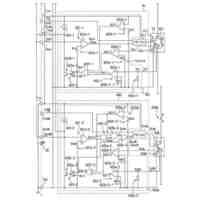
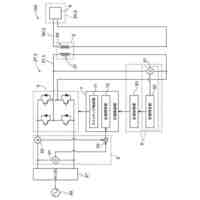
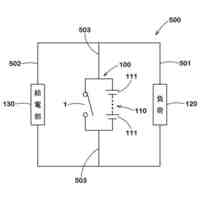
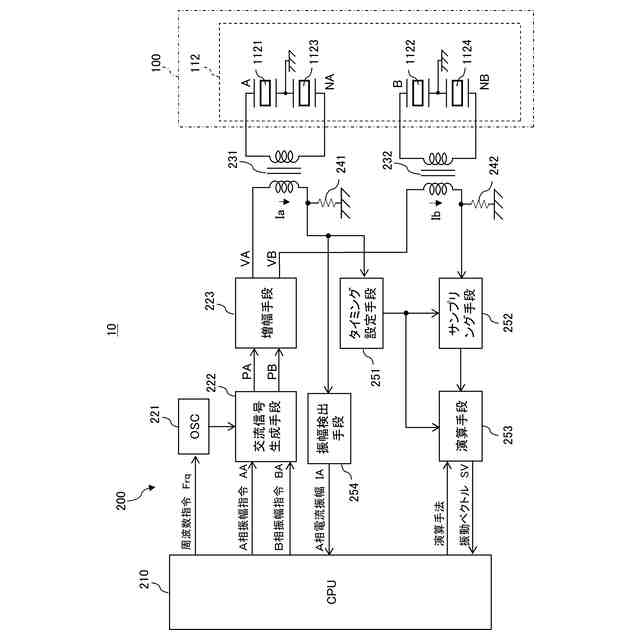
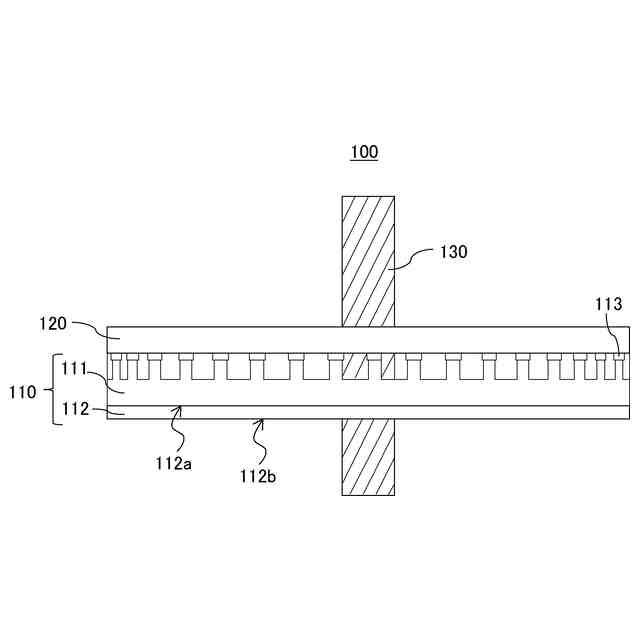
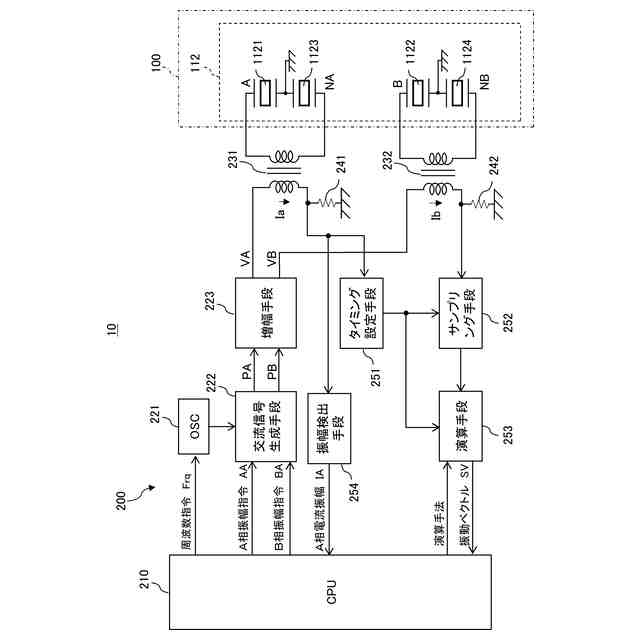
【解決手段】振動型アクチュエータ100の振動体の振動を相互に独立して検出する第1の振動検出手段241及び第2の振動検出手段242と、第1の振動検出手段241の第1の出力信号に基づいて第2の振動検出手段242の検出におけるタイミングを設定するタイミング設定手段251と、タイミング設定手段251で設定されたタイミングで、第2の振動検出手段242の第2の出力信号をサンプリングして、符号付き振動量を取得するサンプリング手段252と、サンプリング手段252で取得された符号付き振動量に基づいて振動型アクチュエータ100の移動体の移動方向における振動ベクトルを算出する演算手段253を備える。
【選択図】図3
特許請求の範囲
【請求項1】
振動体と、前記振動体に加圧接触する移動体と、を有する振動型アクチュエータの駆動装置であって、
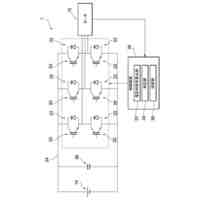
前記振動体に印加される2相以上の交流信号を生成する生成手段と、
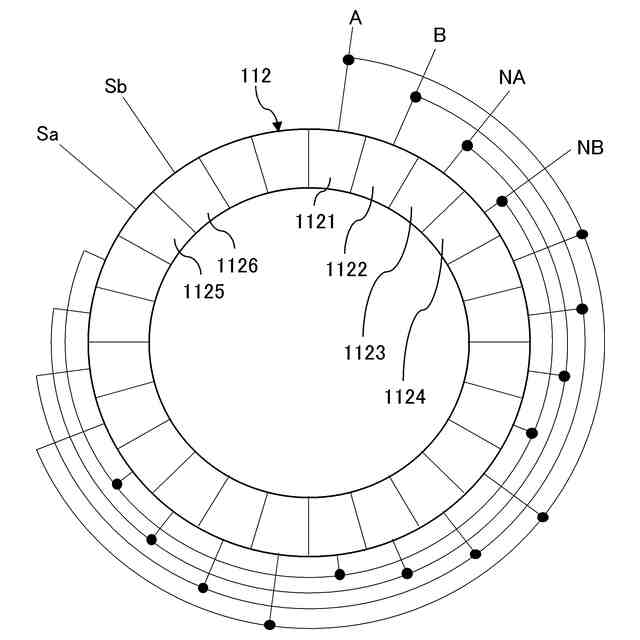
前記振動体の振動を相互に独立して検出する第1の振動検出手段および第2の振動検出手段と、
前記第1の振動検出手段の出力信号である第1の出力信号に基づいて、前記第2の振動検出手段の前記検出におけるタイミングを設定する設定手段と、
前記設定手段で設定されたタイミングで、前記第2の振動検出手段の出力信号である第2の出力信号または前記第1の出力信号と前記第2の出力信号を減算して得られた出力信号をサンプリングして、符号付き振動量を取得するサンプリング手段と、
前記符号付き振動量に基づいて、前記移動体の移動方向における振動ベクトルを算出する演算手段と、
を有することを特徴とする振動型アクチュエータの駆動装置。
続きを表示(約 1,300 文字)
【請求項2】
前記第1の出力信号と前記第2の出力信号を加算する加算手段と、
前記第1の出力信号と前記第2の出力信号を減算する減算手段と、
を更に有し、
前記設定手段は、前記加算手段の出力信号を用いて前記タイミングを設定し、
前記サンプリング手段は、前記減算手段の出力信号をサンプリングして、前記符号付き振動量を取得する
ことを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項3】
前記第1の振動検出手段および前記第2の振動検出手段は、前記振動体に含まれる圧電体であることを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項4】
前記第1の振動検出手段および前記第2の振動検出手段は、前記振動体に対する前記交流信号の印加によって流れる機械腕電流を計測するための電子部品であることを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項5】
前記演算手段は、
前記サンプリング手段において複数の前記タイミングで前記サンプリングした結果得られた複数の前記符号付き振動量に予め定められた係数を掛けた後に和を求めることによって、前記振動ベクトルを算出する
ことを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項6】
前記演算手段は、
前記第1の振動検出手段での前記検出の周期ごとに、前記サンプリング手段において複数の前記タイミングで前記サンプリングした結果得られた複数の前記符号付き振動量を平均して、前記振動ベクトルを算出する
ことを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項7】
前記第1の出力信号の振幅を検出する振幅検出手段と、
前記振幅検出手段で検出された振幅と前記振動ベクトルとに基づいて、前記移動体の速度を推定する速度推定手段と、
を更に有することを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
【請求項8】
前記加算手段の出力信号の振幅を検出する振幅検出手段と、
前記振幅検出手段で検出された振幅と前記振動ベクトルとに基づいて、前記移動体の速度を推定する速度推定手段と、
を更に有することを特徴とする請求項2に記載の振動型アクチュエータの駆動装置。
【請求項9】
前記速度推定手段は、前記振幅検出手段で検出された振幅に応じて設定されたゲインを前記振動ベクトルに乗じて、前記移動体の速度を推定することを特徴とする請求項7または8に記載の振動型アクチュエータの駆動装置。
【請求項10】
前記振動ベクトルが第1の振動目標値に追随するように、前記生成手段で生成される前記2相以上の交流信号における位相差および振幅のうちの少なくとも1つを制御する第1の制御手段
を更に有することを特徴とする請求項1に記載の振動型アクチュエータの駆動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、振動型アクチュエータの駆動装置及びその駆動方法に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
圧電素子や磁歪素子等で励振される振動体と、この振動体に接する移動体を備える振動型アクチュエータの駆動装置において、速度の安定化や即応性の改善等を目的として、振動体の振動を検出する振動検出手段を設けるものがある。
【0003】
例えば、特許文献1では、振動型アクチュエータの回転速度を一定に制御する駆動装置において、振動体の振動振幅を制御するマイナーループを備えるものが開示されている。具体的に、特許文献1に記載の振動型アクチュエータには、振動体の振動を検出するための圧電素子が設けられており、圧電素子が出力する交流信号をAC-DC変換器に入力して振動体の振動振幅を検出している。そして、特許文献1では、振動体の振動振幅が目標振幅に追随するように印加電圧の振幅を制御するマイナーループによって、速度制御の即応性と安定性を向上させている。
【0004】
また、特許文献2では、振動体の振動振幅に対して移動体の移動速度が比例するとして、2相の印加電圧の位相差と振動体の振動振幅の情報から移動方向を含めた符号付きの移動速度を推定している。
【0005】
また、特許文献3では、振動型アクチュエータの位置制御を行う駆動装置において、移動体の速度を制御するマイナーループを挿入することで安定性を向上させている。特許文献1に記載のマイナーループでは符号の無い振動振幅を検出して一方向の回転速度を制御しているのに対して、特許文献3では符号付きの速度を検出して方向反転を伴う速度制御を実現している。
【先行技術文献】
【特許文献】
【0006】
特許第2874765号公報
特開2003-33057号公報
特開平5-184167号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載のように振動体の振動振幅を制御するマイナーループでは、移動体の移動方向が変わっても振動体の振動振幅は符号が変化しないため、特許文献3に記載のような移動方向の変化が伴う位置制御には使えないという問題がある。
【0008】
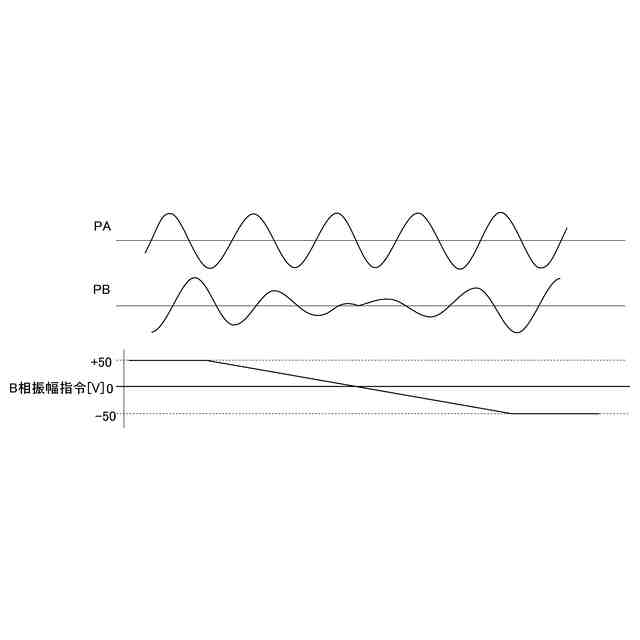
特許文献2では、振動体の振動振幅の検出値に2相の印加電圧の位相差の符号を付加し、移動体の移動方向を含めた速度を推定している。しかしながら、特許文献2では、2相の印加電圧の位相差の変化に対して振動体の振動振幅の検出値における変化が時間的な遅れを持つため、特に移動方向が反転するタイミングの近傍では振動体の振動振幅の符号が間違って設定されるという問題がある。
【0009】
また、特許文献3に記載のように移動体の速度を制御するマイナーループを用いる場合、振動体から速度センサまでの機構のガタや共振系の影響により、制御帯域を広くできないという問題がある。
【0010】
本発明は、このような問題点に鑑みてなされたものであり、振動体と移動体を備える振動型アクチュエータにおいて、移動体の移動方向が反転する領域でも振動体の振動状態を適正に検出することが可能な仕組みを提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
5日前
個人
バッテリーの補助装置
13日前
個人
磁力のみを動力とするモーター
14日前
日産自動車株式会社
発電装置
13日前
株式会社ミツバ
回転電機
13日前
富士電機株式会社
電力変換装置
1日前
個人
非対称鏡像力駆動型の静電発電機
1日前
株式会社ミツバ
制動装置
6日前
株式会社ミツバ
回転電機
今日
株式会社ミツバ
回転電機
13日前
オムロン株式会社
電力変換装置
6日前
ヴィガラクス株式会社
電気供給システム
7日前
富士電機株式会社
半導体モジュール
6日前
ニチコン株式会社
電源装置
13日前
個人
超電導ロータリー式発電原動機
6日前
矢崎総業株式会社
電気接続箱
7日前
株式会社ダイヘン
双方向コンバータ
今日
株式会社日立製作所
電気機器
13日前
株式会社デンソー
電力変換装置
7日前
株式会社日立製作所
電気機器
13日前
株式会社デンソー
電力変換装置
7日前
トヨタ自動車株式会社
駆動装置
7日前
ダイハツ工業株式会社
グロメット
6日前
株式会社テイエルブイ
発電装置
7日前
株式会社ダイフク
非接触給電設備
7日前
住友電装株式会社
配線部材
8日前
ボーンズ株式会社
放電回路
13日前
株式会社テイエルブイ
発電装置及び蒸気システム
7日前
株式会社テイエルブイ
発電装置及び蒸気システム
7日前
トヨタホーム株式会社
建物の給電システム
1日前
株式会社アイシン
給電補助システム
6日前
株式会社明電舎
直流負荷装置
1日前
株式会社アドヴィックス
電気モータ制御装置
8日前
セイコーエプソン株式会社
駆動ステージ
13日前
株式会社デンソー
回転電機
8日前
パナソニックIPマネジメント株式会社
電力供給装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ