TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024044466
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022149995
出願日
2022-09-21
発明の名称
電動機
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
H02P
21/22 20160101AFI20240326BHJP(電力の発電,変換,配電)
要約
【課題】損失が大きくなることを抑制すること。
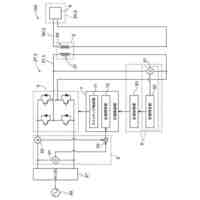
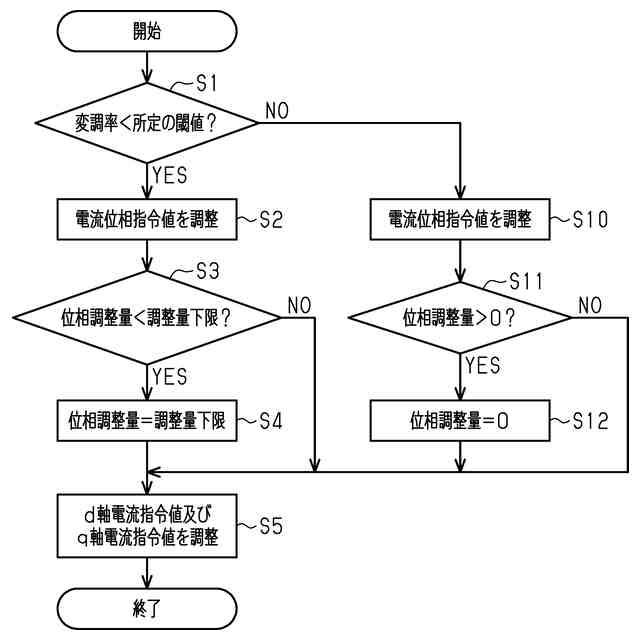
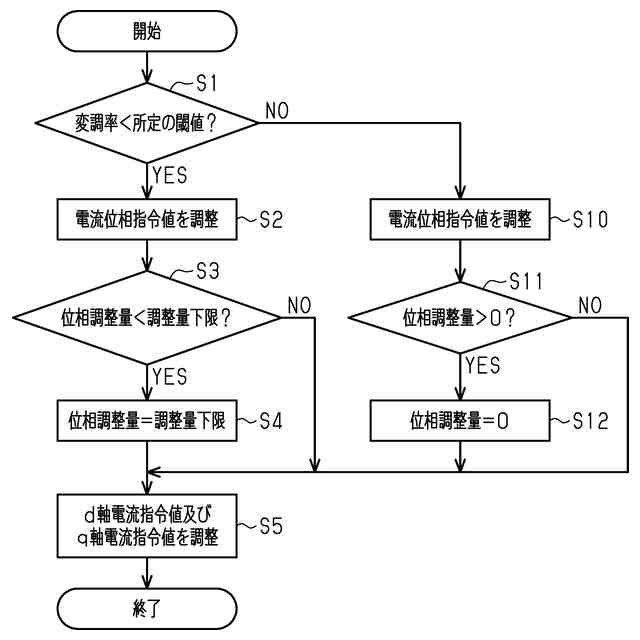
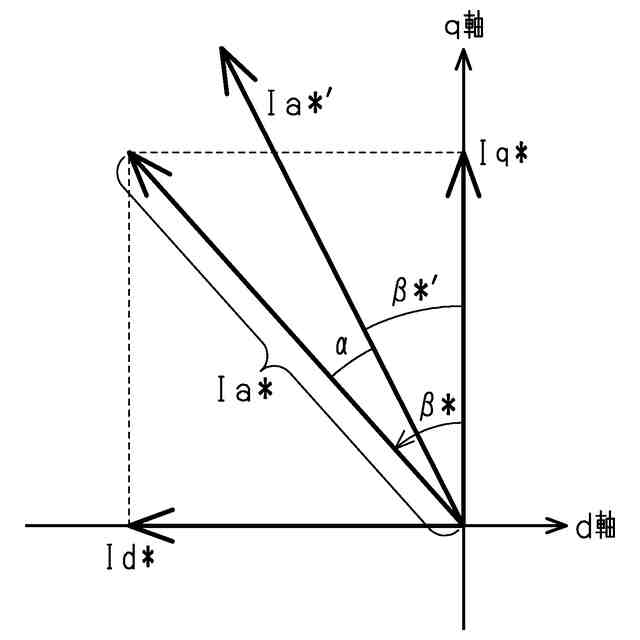
【解決手段】電動機は、制御部を備える。制御部は、電流座標変換部と、速度制御部と、位相調整部と、を備える。電流座標変換部は、モータの各相に流れる実電流を、d軸電流及びq軸電流に変換する。速度制御部は、角速度と角速度指令値との差分を用いたPI制御により、d軸電流指令値及びq軸電流指令値を算出する。位相調整部は、変調率が所定の閾値未満の場合、d軸電流指令値及びq軸電流指令値の合成ベクトルとq軸との位相差である電流位相を予め定められた位相調整量で段階的に減算させ、d軸電流指令値及びq軸電流指令値を調整する。
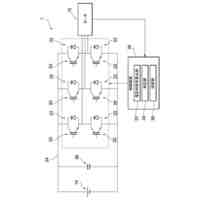
【選択図】図4
特許請求の範囲
【請求項1】
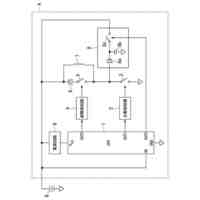
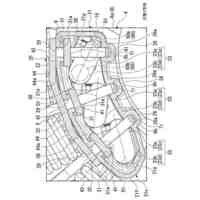
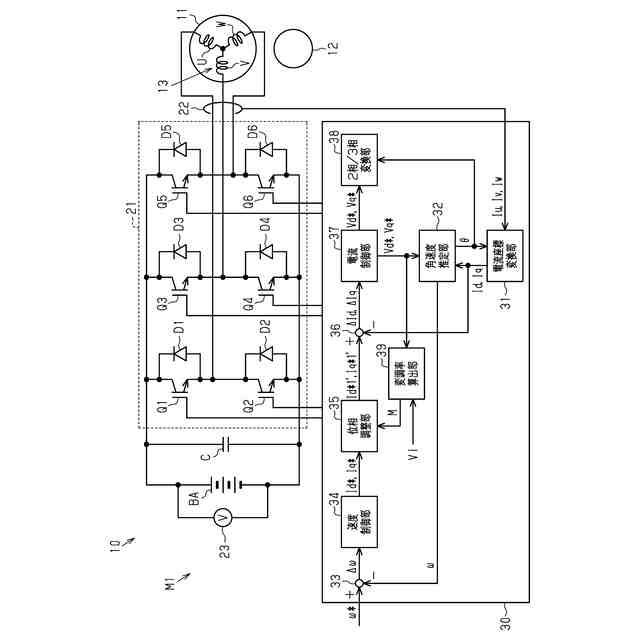
回転子及び3相のコイルが巻回された固定子を有するモータと、
スイッチング素子を有し、前記モータを駆動するインバータ部と、
角速度指令値が入力され、PWM信号を用いて前記スイッチング素子を制御する制御部と、
を備える電動機であって、
前記制御部は、
電圧指令値とキャリア周波数とに基づいて前記PWM信号を生成し、
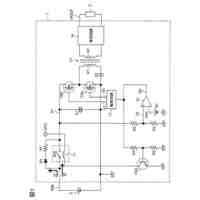
前記モータの各相に流れる実電流を、d軸電流及びq軸電流に変換する電流座標変換部と、
前記コイルに発生する誘起電圧を算出し、前記誘起電圧に基づき前記回転子の回転位置を推定し、前記回転位置に基づいて前記回転子の角速度を推定する角速度推定部と、
前記角速度推定部によって推定された前記角速度と前記角速度指令値との差分を用いたPI制御により、d軸電流指令値及びq軸電流指令値を算出する速度制御部と、
前記電圧指令値の変調率を演算する変調率算出部と、
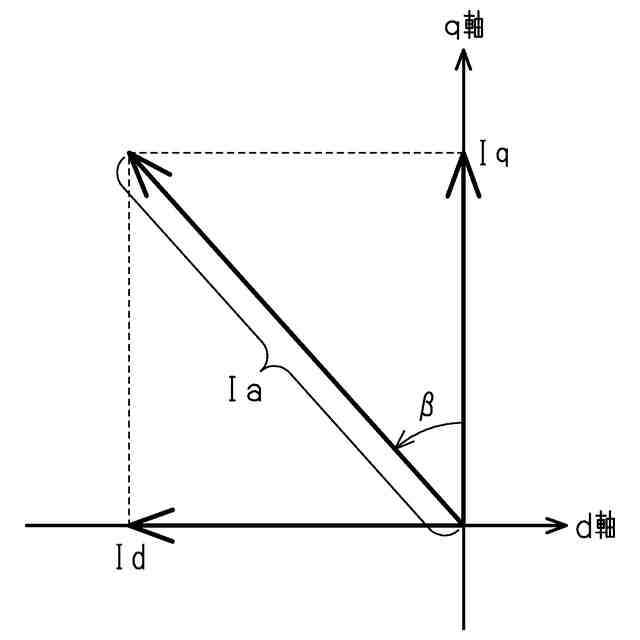
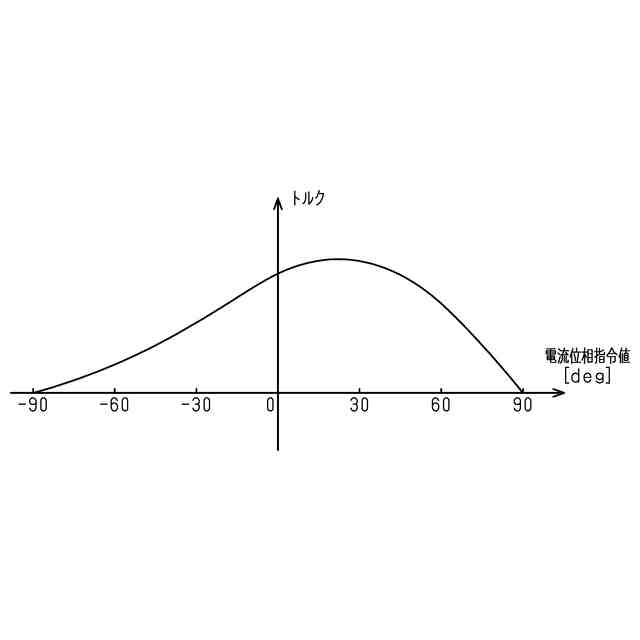
前記変調率算出部によって演算された前記変調率が所定の閾値未満の場合、前記d軸電流指令値及び前記q軸電流指令値の合成ベクトルとq軸との位相差である電流位相を予め定められた位相調整量で段階的に減算させ、前記d軸電流指令値及び前記q軸電流指令値を調整する位相調整部と、を有することを特徴とする電動機。
続きを表示(約 170 文字)
【請求項2】
前記制御部は、前記変調率が前記所定の閾値以上の場合、前記位相調整量が0になるまで前記位相調整量を大きくする、請求項1に記載の電動機。
【請求項3】
前記制御部は、前記位相調整量が予め定められた調整量下限より小さい場合、前記位相調整量を前記調整量下限にする、請求項1又は請求項2に記載の電動機。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動機に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
インバータをセンサレス制御することによってモータを駆動する場合、モータの回転子の回転位置を推定する必要がある。センサレス制御は、回転子の回転位置をソフトウェアで推定することによってハードウェアの位置センサを用いずにモータを駆動する制御方式である。回転子の回転位置は、モータの備えるコイルに発生する誘起電圧に基づいて推定することができる。
【0003】
回転子が低速域で回転している場合、誘起電圧が小さくなり、回転子の回転位置の推定精度が低下する。
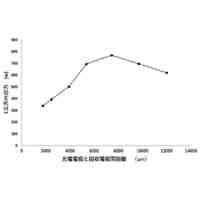
また、回転数が一定であっても、入力電圧が大きく、変調率が小さい場合、デッドタイムの影響によって回転位置の推定精度が低下する。この場合、デッドタイム補償によってデッドタイムによる電圧誤差の影響を小さくしているものの、電圧誤差を完全に排除することは難しい。デッドタイムによる電圧誤差は変調率に依存しない。
【0004】
一方で、入力電圧が大きく、変調率が小さいときほど、インバータの出力電圧が小さくなるため、変調率が小さいときほど出力電圧に対する電圧誤差の割合が大きくなる。この結果、出力電圧に対する電圧誤差の影響によって、入力電圧が大きく、変調率が小さい場合、回転位置の推定精度が低下する。
【0005】
特許文献1に開示のモータ制御装置は、モータの回転数が所定の回転数よりも低い場合に、d軸電流指令値を0より大きい値にする。これにより、コイルに発生する誘起電圧を大きくすることができる。誘起電圧が大きくなると、回転位置の推定精度が向上する。
【先行技術文献】
【特許文献】
【0006】
特開2018-196309号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1では、モータの回転数が所定の回転数よりも低い場合に、入力電圧が変動して大きくなると、変調率が変動して小さくなり、回転位置の推定精度が低下する。また、d軸電流指令値が過剰に大きくなる場合がある。この場合、モータ電流が大きくなることによって損失が増加するおそれがある。
【課題を解決するための手段】
【0008】
上記課題を解決する電動機は、回転子及び3相のコイルが巻回された固定子を有するモータと、スイッチング素子を有し、前記モータを駆動するインバータ部と、角速度指令値が入力され、PWM信号を用いて前記スイッチング素子を制御する制御部と、を備える電動機であって、前記制御部は、電圧指令値とキャリア周波数とに基づいて前記PWM信号を生成し、前記モータの各相に流れる実電流を、d軸電流及びq軸電流に変換する電流座標変換部と、前記コイルに発生する誘起電圧を算出し、前記誘起電圧に基づき前記回転子の回転位置を推定し、前記回転位置に基づいて前記回転子の角速度を推定する角速度推定部と、前記角速度推定部によって推定された前記角速度と前記角速度指令値との差分を用いたPI制御により、d軸電流指令値及びq軸電流指令値を算出する速度制御部と、前記電圧指令値の変調率を演算する変調率算出部と、前記変調率算出部によって演算された前記変調率が所定の閾値未満の場合、前記d軸電流指令値及び前記q軸電流指令値の合成ベクトルとq軸との位相差である電流位相を予め定められた位相調整量で段階的に減算させ、前記d軸電流指令値及び前記q軸電流指令値を調整する位相調整部と、を有することを要旨とする。
【0009】
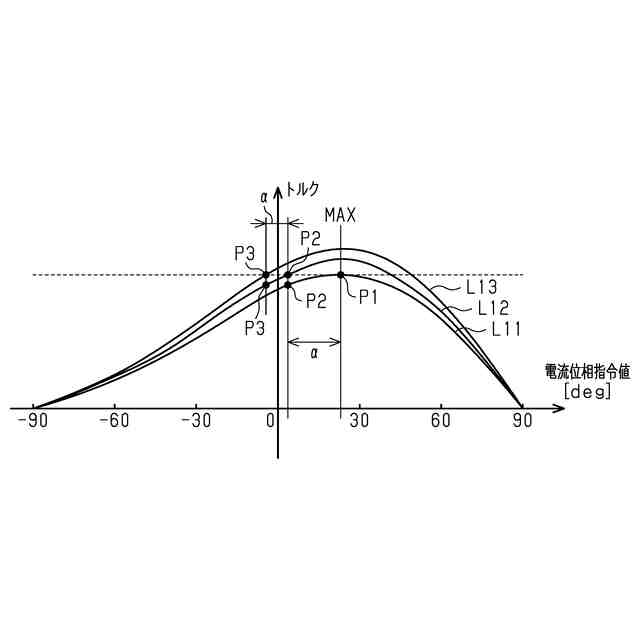
位相調整部は、変調率が所定の閾値未満の場合、電流位相を位相調整量で段階的に減算する。これにより、モータ電流は大きくなる。モータ電流が大きくなることによってインバータ部の出力電圧が大きくなる。変調率が大きくなるため、回転位置の推定精度を向上させることができる。変調率が所定の閾値以上になるまで電流位相が位相調整量で段階的に減算されることで、変調率が所定の閾値以上になると、電流位相が位相調整量で減算されなくなる。モータ電流が過剰に大きくなることが抑制されるため、モータ電流が大きくなることを原因として損失が大きくなることを抑制できる。
【0010】
上記電動機について、前記制御部は、前記変調率が前記所定の閾値以上の場合、前記位相調整量が0になるまで前記位相調整量を大きくしてもよい。
上記電動機について、前記制御部は、前記位相調整量が予め定められた調整量下限より小さい場合、前記位相調整量を前記調整量下限にしてもよい。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
4日前
ニデック株式会社
モータ
19日前
個人
バッテリーの補助装置
12日前
ヨツギ株式会社
鳥害防止具
20日前
個人
磁力のみを動力とするモーター
13日前
株式会社プロテリアル
リニアモータ
20日前
株式会社アイドゥス企画
モータシリンダ
19日前
日産自動車株式会社
発電装置
12日前
株式会社ミツバ
回転電機
12日前
株式会社ミツバ
制動装置
5日前
株式会社ミツバ
回転電機
12日前
オムロン株式会社
電力変換装置
5日前
ブラザー工業株式会社
制御装置
19日前
個人
非対称鏡像力駆動型の静電発電機
今日
富士電機株式会社
電力変換装置
今日
ヴィガラクス株式会社
電気供給システム
6日前
住友電装株式会社
ワイヤハーネス
20日前
個人
超電導ロータリー式発電原動機
5日前
富士電機株式会社
半導体モジュール
5日前
ニチコン株式会社
電源装置
12日前
矢崎総業株式会社
電気接続箱
6日前
トヨタ紡織株式会社
ロータの製造方法
13日前
株式会社日立製作所
電気機器
12日前
トヨタ自動車株式会社
駆動装置
6日前
株式会社日立製作所
電気機器
12日前
株式会社デンソー
電力変換装置
6日前
株式会社アイシン
熱電発電装置
20日前
大阪瓦斯株式会社
電力調達装置
19日前
株式会社デンソー
電力変換装置
6日前
ニデック株式会社
駆動装置
19日前
住友電装株式会社
配線部材
7日前
株式会社プロテリアル
ヨーク組立体及びリニアモータ
20日前
ダイハツ工業株式会社
グロメット
5日前
株式会社ダイフク
非接触給電設備
6日前
株式会社テイエルブイ
発電装置
6日前
ニデック株式会社
駆動装置
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ