TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024043188
公報種別
公開特許公報(A)
公開日
2024-03-29
出願番号
2022148229
出願日
2022-09-16
発明の名称
モータ制御装置及び車両用制動装置
出願人
株式会社デンソー
,
株式会社SOKEN
代理人
弁理士法人服部国際特許事務所
主分類
H02P
21/22 20160101AFI20240322BHJP(電力の発電,変換,配電)
要約
【課題】多相モータのロック通電時に特定の相に発熱が偏ることを防止するモータ制御装置を提供する。
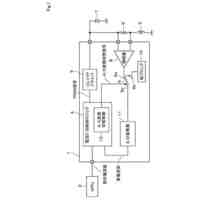
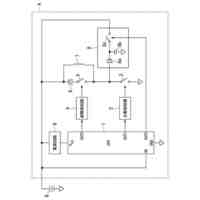
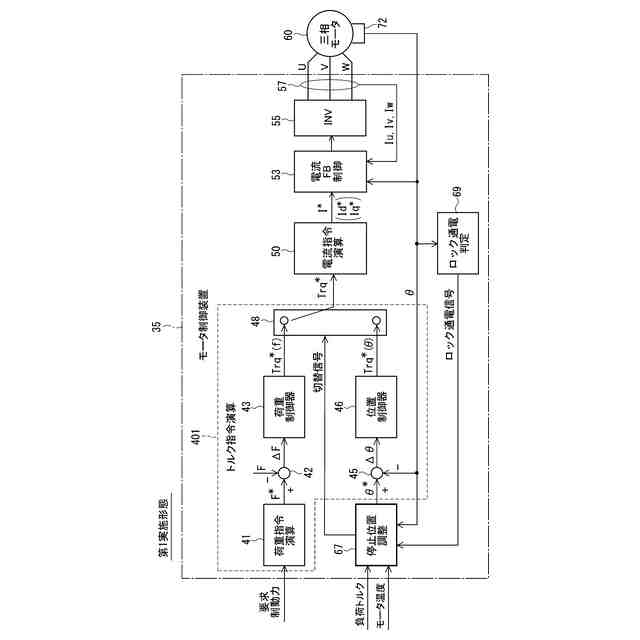
【解決手段】モータ制御装置351-354は、トルク指令値Trq
*
を演算するトルク指令演算部40と、電流指令値I
*
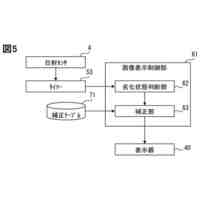
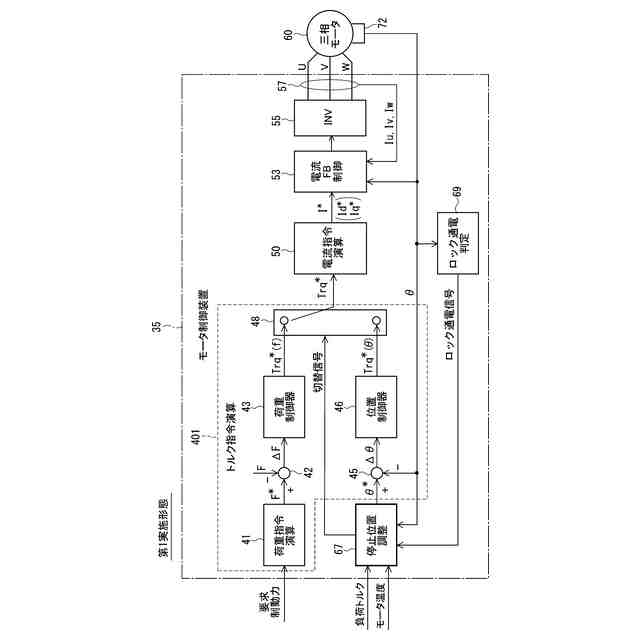
を演算する電流指令値演算部50と、インバータ(電力変換器)55と、停止位置調整器67と、を備える。停止位置調整器67は、所定の適用除外要件を満たす場合を除き、多相モータ60の回転が停止した状態で通電するロック通電時に、所定の位置調整範囲内で回転停止位置を調整する「停止位置調整処理」を実行する。停止位置調整処理において、停止位置調整器67は、各相のうち相対的に放熱性が高い一相以上の高放熱相に電流を偏らせるように回転停止位置を調整する。トルク指令演算部40又は電流指令演算部50は、調整後の回転停止位置が反映されたトルク指令値Trq
*
又は電流指令値I
*
を演算する。
【選択図】図5
特許請求の範囲
【請求項1】
多相モータ(60)のトルク指令値を演算するトルク指令演算部(40)と、
前記トルク指令値に基づき前記多相モータに通電する電流指令値を演算する電流指令演算部(50)と、
入力された電力を変換し、前記電流指令値に応じた交流電力を前記多相モータに供給する電力変換器(55)と、
所定の適用除外要件を満たす場合を除き、前記多相モータの回転が停止した状態で通電するロック通電時に、所定の位置調整範囲内で回転停止位置を調整する停止位置調整処理を実行する停止位置調整器(67)と、
を備え、
前記停止位置調整処理において、前記停止位置調整器は、各相のうち相対的に放熱性が高い一相以上の高放熱相に電流を偏らせるように回転停止位置を調整し、
前記トルク指令演算部又は前記電流指令演算部は、調整後の回転停止位置が反映された前記トルク指令値又は前記電流指令値を演算するモータ制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記高放熱相が一相である場合、
前記停止位置調整処理において、
前記多相モータの回転停止位置は、前記高放熱相の電流絶対値が前記位置調整範囲内で最大となる位置に調整される請求項1に記載のモータ制御装置。
【請求項3】
前記停止位置調整処理の前記位置調整範囲は、電気角±90°以内に設定される請求項1に記載のモータ制御装置。
【請求項4】
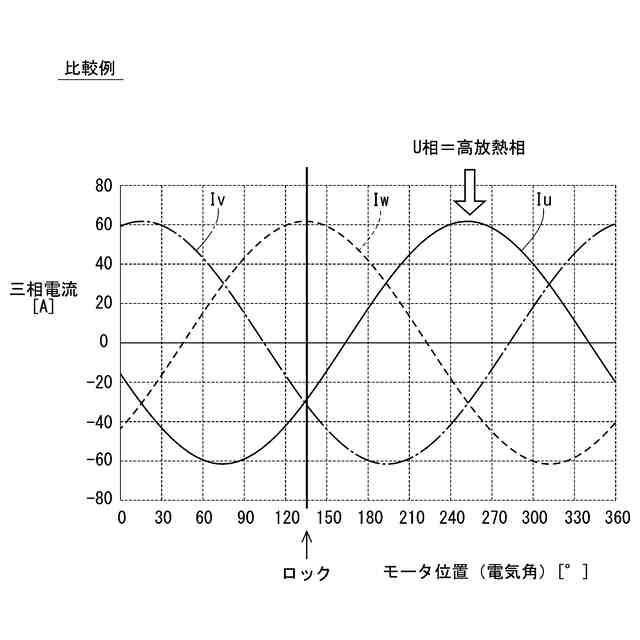
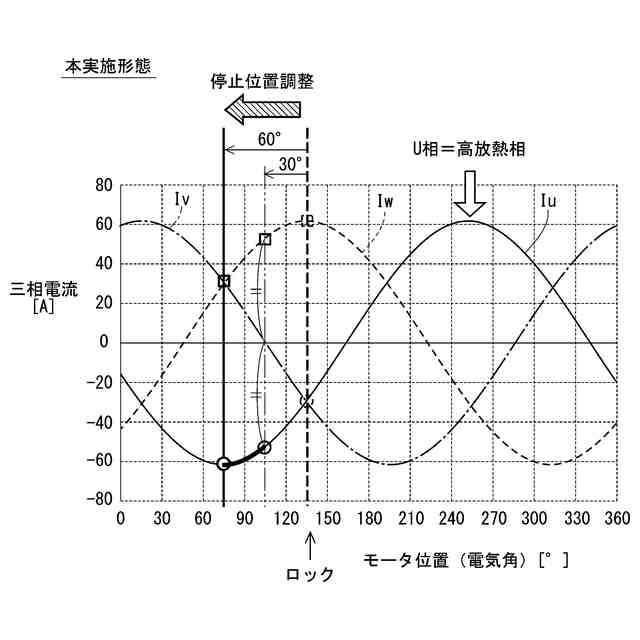
前記多相モータは三相モータであり、三相中の二相が前記高放熱相であり、前記高放熱相以外の一相が、相対的に放熱性が低い低放熱相である場合、
前記停止位置調整処理において、
前記多相モータの回転停止位置は、二相の前記高放熱相の電流の符号が反対で絶対値が等しく、且つ、前記低放熱相の電流が0となる位置に調整される請求項1に記載のモータ制御装置。
【請求項5】
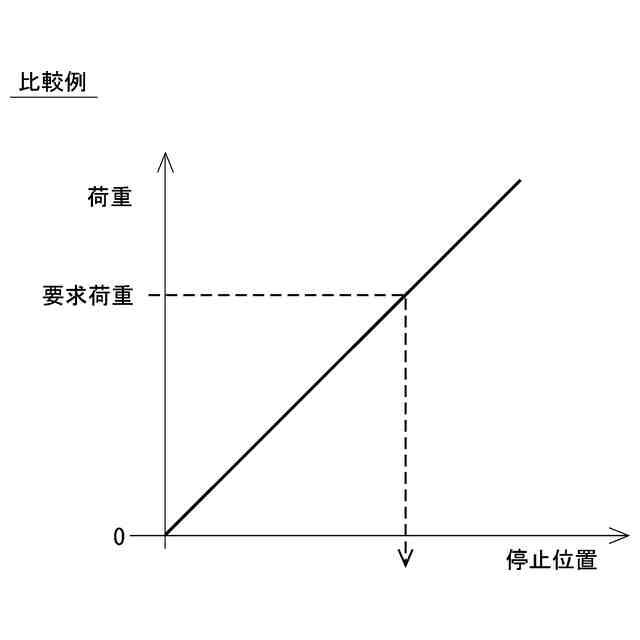
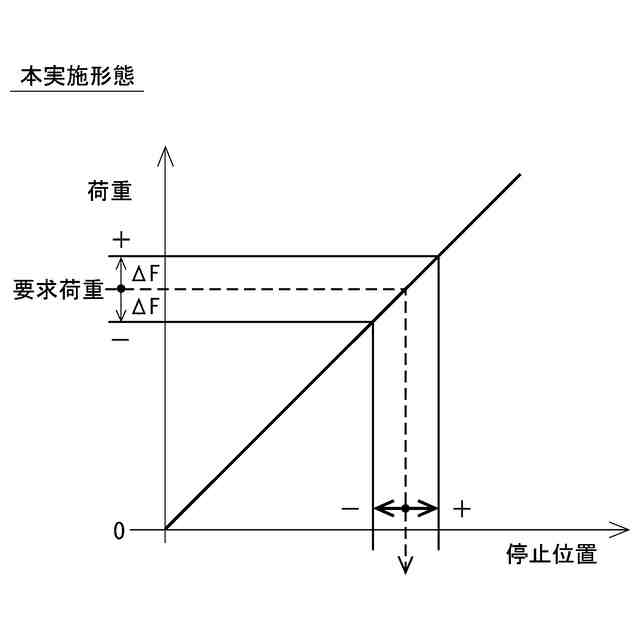
前記ロック通電時における前記多相モータの回転停止位置に応じて負荷に作用する荷重が変化するシステムに適用され、
前記停止位置調整処理において、
前記多相モータの回転停止位置は、前記負荷に作用する荷重の目標値である要求荷重の変動許容範囲に対応する範囲に調整される請求項1に記載のモータ制御装置。
【請求項6】
前記適用除外要件として、
前記多相モータの負荷トルクが所定のトルク閾値未満である、
前記多相モータの負荷トルクの変動が所定のトルク変動閾値より大きい、
前記多相モータの温度が所定の温度閾値未満である、
のうち少なくともいずれか一つの要件が満たされたとき、
前記停止位置調整器は、前記停止位置調整処理の実行を中止する請求項1に記載のモータ制御装置。
【請求項7】
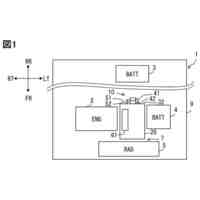
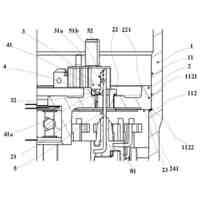
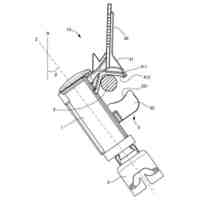
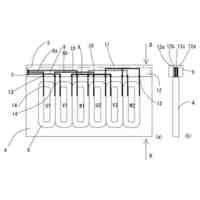
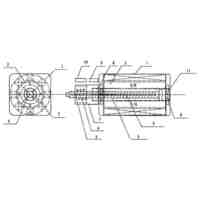
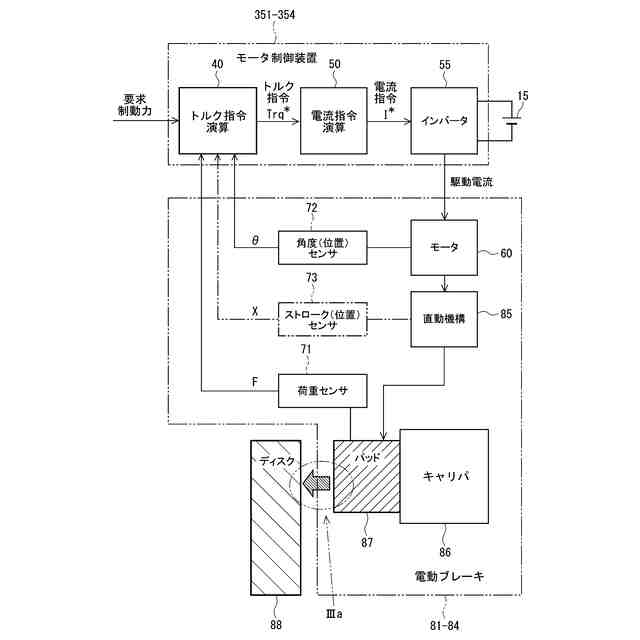
前後方向に二列以上の左右対の車輪(91-94)を含む四輪以上の車両(900)に搭載され、多相モータ(60)が出力したトルクを直動機構(85)により直動力に変換し、対応する車輪に押圧して制動力を発生させる複数の電動ブレーキ(81-84)により車両を制動する車両用制動装置であって、
各前記電動ブレーキにおいて前記多相モータの通電を制御する請求項1~6のいずれか一項に記載のモータ制御装置(351-354)を備え、
複数の前記モータ制御装置による前記停止位置調整処理を調停する車両用制動装置。
【請求項8】
各左右対の車輪について、複数の前記モータ制御装置の前記停止位置調整処理によって生じる制動力の増加又は減少の方向が一致するように前記停止位置調整処理を調停する請求項7に記載の車両用制動装置。
【請求項9】
複数の車輪について、複数の前記モータ制御装置の前記停止位置調整処理によって生じる制動力の増加又は減少の方向が打ち消し合うように前記停止位置調整処理を調停する請求項7に記載の車両用制動装置。
【請求項10】
前記適用除外要件として、車速が車速閾値以上であるとき、複数の前記モータ制御装置の前記停止位置調整器は、前記停止位置調整処理の実行を中止する請求項7に記載の車両用制動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置及び車両用制動装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、多相モータの通電を制御するモータ制御装置が知られている。また、多相モータが出力したトルクを直動機構により直動力に変換し、対応する車輪に押圧して制動力を発生させる車両の電動ブレーキ装置が知られている。
【0003】
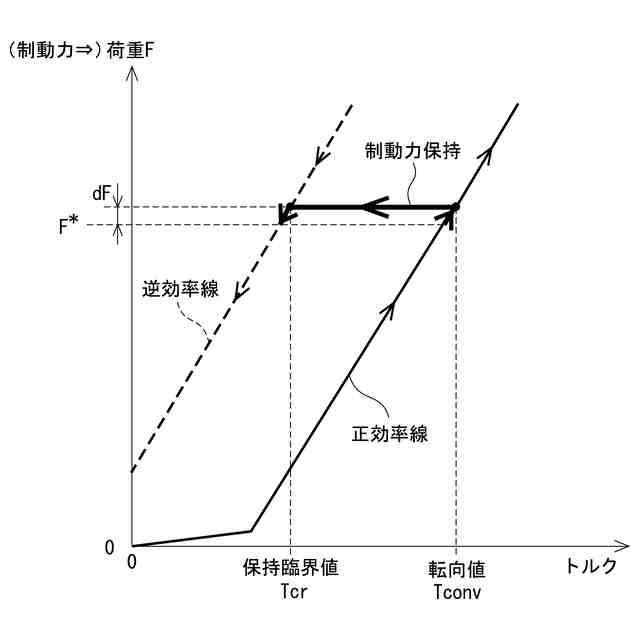
例えば特許文献1に開示された電動ブレーキ装置では、モータ制御装置は、荷重センサで検出される押圧力の大きさに基づいてモータの駆動電流を制御する。モータトルクと押圧力との関係はヒステリシス特性を有している。このモータ制御装置は、押圧力をブレーキディスクに加えて保持するとき、押圧力が目標値よりも大きい所定値に上昇するまで正効率線に沿ってモータのトルクを増加させてから、押圧力が目標値に減少するまで逆効率線に沿ってモータのトルクを減少させる。
【先行技術文献】
【特許文献】
【0004】
特許第6080682号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の従来技術によると、正効率線により目標制動力よりも少し高い制動力を発生させてから制動力を保持しつつ電流を下げ、逆効率線で動作させて目標制動力まで下げるように制御することで、電流を低減することができる。しかし、電動ブレーキのアクチュエータが多相モータで構成されている場合、制動力を保持する過程でロック通電が必要となり、特定の相に電流が集中し、発熱が偏るという問題がある。この問題は、電動ブレーキ装置に限らず、ロック通電される可能性がある多相モータ全てに共通する。
【0006】
本発明の目的は、多相モータのロック通電時に特定の相に発熱が偏ることを防止するモータ制御装置を提供することにある。また、本発明の目的は、各車輪用の電動ブレーキを構成する多相モータの通電を制御する、上記目的の複数のモータ制御装置を備えた車両用制動装置を提供することにある。
【課題を解決するための手段】
【0007】
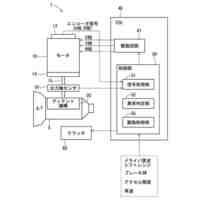
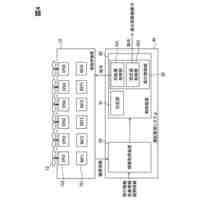
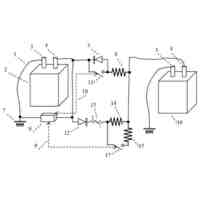
本発明のモータ制御装置は、トルク指令演算部(40)と、電流指令値演算部(50)と、電力変換器(55)と、停止位置調整器(67)と、を備える。トルク指令演算部は、多相モータ(60)のトルク指令値を演算する。電流指令演算部は、トルク指令値に基づき多相モータに通電する電流指令値を演算する。電力変換器は、入力された電力を変換し、電流指令値に応じた交流電力を多相モータに供給する。
【0008】
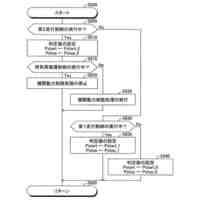
停止位置調整器は、所定の適用除外要件を満たす場合を除き、多相モータの回転が停止した状態で通電するロック通電時に、所定の位置調整範囲内で回転停止位置を調整する「停止位置調整処理」を実行する。
【0009】
停止位置調整処理において、停止位置調整器は、各相のうち相対的に放熱性が高い一相以上の高放熱相に電流を偏らせるように回転停止位置を調整する。トルク指令演算部又は電流指令演算部は、調整後の回転停止位置が反映されたトルク指令値又は電流指令値を演算する。
【0010】
これにより本発明のモータ制御装置は、多相モータのロック通電時に特定の相に発熱が偏ることを防止することができる。好ましくは、高放熱相が一相である場合、停止位置調整処理において、多相モータの回転停止位置は、高放熱相の電流絶対値が位置調整範囲内で最大となる位置に調整される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
構造体
4日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
虚像表示装置
4日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
巻線界磁ロータ
4日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソー
回転電機のステータ
4日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソー
車両用表示制御システム
5日前
株式会社デンソー
半導体装置とその製造方法
4日前
株式会社デンソー
リニアソレノイド電流制御装置
4日前
トヨタ自動車株式会社
車両走行装置
4日前
株式会社SOKEN
地図更新システム
4日前
株式会社SOKEN
ロータリ型多方弁
4日前
トヨタ自動車株式会社
排気センサの制御装置
5日前
株式会社デンソー
制御装置、運航管理システム、および制御プログラム
4日前
株式会社デンソーテン
車載装置、情報処理システムおよび車載装置の制御方法
4日前
株式会社デンソー
ペダル装置
6日前
株式会社デンソー
ロータの製造装置、ロータの製造方法及びロータ
6日前
個人
2軸モーター
3日前
ニデック株式会社
モータ
18日前
個人
バッテリーの補助装置
11日前
ヨツギ株式会社
鳥害防止具
19日前
個人
磁力のみを動力とするモーター
12日前
株式会社プロテリアル
リニアモータ
19日前
株式会社アイドゥス企画
モータシリンダ
18日前
日産自動車株式会社
発電装置
11日前
オムロン株式会社
電力変換装置
4日前
ブラザー工業株式会社
制御装置
18日前
株式会社ミツバ
制動装置
4日前
株式会社ミツバ
回転電機
11日前
株式会社ミツバ
回転電機
11日前
住友電装株式会社
ワイヤハーネス
19日前
ヴィガラクス株式会社
電気供給システム
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ