TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024033465
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022137050
出願日
2022-08-30
発明の名称
搬送システム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
B25J
5/00 20060101AFI20240306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
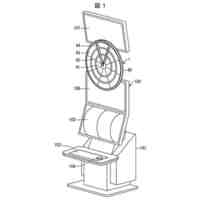
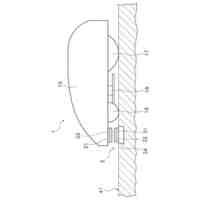
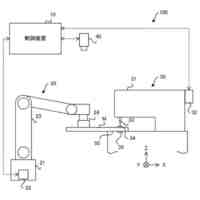
【課題】ロボット装置と搬送装置との間のドッキング及びその解除を容易に行う。
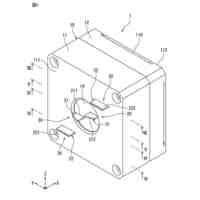
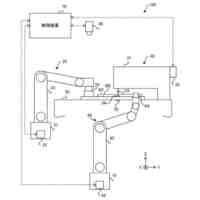
【解決手段】ロボット装置が搭載されたカートと、前記ロボット装置及び前記カートを搬送する搬送装置とを備える搬送システムであって、前記カートの把持部が前記搬送装置の被把持部を把持することで、前記カートと前記搬送装置とが連結され、前記カートの前記把持部が前記搬送装置の前記被把持部に対する把持を解除することで、前記カートと前記搬送装置との連結が解除される、搬送システム。
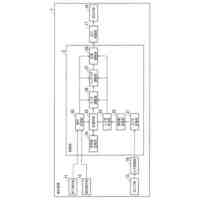
【選択図】図1
特許請求の範囲
【請求項1】
ロボット装置が搭載されたカートと、前記ロボット装置及び前記カートを搬送する搬送装置とを備える搬送システムであって、
前記カートの把持部が前記搬送装置の被把持部を把持することで、前記カートと前記搬送装置とが連結され、
前記カートの前記把持部が前記搬送装置の前記被把持部に対する把持を解除することで、前記カートと前記搬送装置との連結が解除される、
搬送システム。
続きを表示(約 630 文字)
【請求項2】
前記カートは、前記カートの前記把持部が前記搬送装置の前記被把持部を把持した状態で前記カートの前記把持部を水平方向の軸回りに回転可能にする回転機構を有し、
前記搬送装置は、前記カートの前記把持部が前記搬送装置の前記被把持部を把持した状態で前記搬送装置の前記被把持部を水平方向に対して垂直方向に移動可能にする移動機構を有する、
請求項1に記載の搬送システム。
【請求項3】
前記カートの前記把持部は、エアを動力源とする、
請求項1に記載の搬送システム。
【請求項4】
前記カートの前記把持部は、電力を動力源とする、
請求項1に記載の搬送システム。
【請求項5】
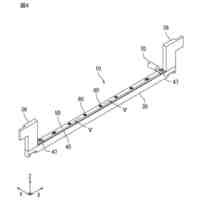
前記カートは、前記ロボット装置が取り付けられたフレームと、前記フレームに設けられた車輪と、前記フレームに設けられ、前記フレームをジャッキアップするジャッキと、を有し、
前記カートと前記搬送装置との連結の解除が行われた後、前記ジャッキによって前記フレームをジャッキアップして前記車輪を路面から離間させることで前記カートを路面に固定する、
請求項1から4の何れか一項に記載の搬送システム。
【請求項6】
前記ジャッキによって前記フレームを下降して前記車輪を路面に接触させた状態で前記カートと前記搬送装置との連結が行われる、
請求項5に記載の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、ワークを把持するアームと、フロアを移動するモバイルロボットとが一体化されたモバイルマニピュレータが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-82274号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業を行うロボット装置とモバイルロボットなどの搬送装置とが一体である場合、ロボット装置が作業を終えるまで、搬送装置は移動することができず、作業効率が悪くなる。ロボット装置と搬送装置とを別体とし、ロボット装置と搬送装置との間のドッキング及びその解除を容易に行うことが可能な技術が要望されている。
【0005】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、ロボット装置と搬送装置との間のドッキング及びその解除を容易に行うことが可能な技術を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一観点に係る搬送システムは、ロボット装置が搭載されたカートと、前記ロボット装置及び前記カートを搬送する搬送装置とを備える搬送システムであって、前記カートの把持部が前記搬送装置の被把持部を把持することで、前記カートと前記搬送装置とが連結され、前記カートの前記把持部が前記搬送装置の前記被把持部に対する把持を解除することで、前記カートと前記搬送装置との連結が解除される、搬送システムである。
【0007】
搬送システムによれば、カートの把持部が搬送装置の被把持部を把持することで、カートと搬送装置とが連結されるため、ロボット装置と搬送装置との間のドッキングを容易に行うことができる。また、搬送システムによれば、カートの把持部が搬送装置の被把持部に対する把持を解除することで、カートと搬送装置との連結が解除されるため、ロボット装置と搬送装置との間のドッキングの解除を容易に行うことができる。
【0008】
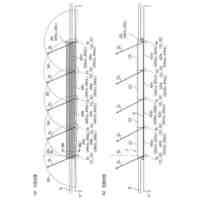
本発明の一観点に係る搬送システムにおいて、前記カートは、前記カートの前記把持部が前記搬送装置の前記被把持部を把持した状態で前記カートの前記把持部を水平方向の軸回りに回転可能にする回転機構を有し、前記搬送装置は、前記カートの前記把持部が前記搬送装置の前記被把持部を把持した状態で前記搬送装置の前記被把持部を水平方向に対して垂直方向に移動可能にする移動機構を有してもよい。カート及び搬送装置の少なくとも一方が路面の傾斜部分や段差部分を走行する場合に、把持部が回転することにより、カートと搬送装置との連結部分に負荷が加わることが抑制される。カート及び搬送装置の少なくとも一方が路面の傾斜部分や段差部分を走行する場合に、把持部によって把持された被把持部が水平方向に対して垂直方向に移動することで、カートと搬送装置との連結部分に負荷が加わることが抑制される。
【0009】
本発明の一観点に係る搬送システムにおいて、前記カートの前記把持部は、エアを動力
源としてもよい。カートの把持部は、エアを動力源として動作することが可能となる。本発明の一観点に係る搬送システムにおいて、前記カートの前記把持部は、電力を動力源としてもよい。カートの把持部は、電力を動力源として動作することが可能となる。
【0010】
本発明の一観点に係る搬送システムにおいて、前記カートは、前記ロボット装置が取り付けられたフレームと、前記フレームに設けられた車輪と、前記フレームに設けられ、前記フレームをジャッキアップするジャッキと、を有し、前記カートと前記搬送装置との連結の解除が行われた後、前記ジャッキによって前記フレームをジャッキアップして前記車輪を路面から離間させることで前記カートを路面に固定してもよい。カートが路面に固定されているため、カートと搬送装置との連結の解除が行われた後に、ロボット装置及びカートが意図せずに移動してしまうことが抑止される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
操作装置
22日前
オムロン株式会社
表示システム
15日前
オムロン株式会社
球体駆動装置
17日前
オムロン株式会社
電力変換装置
15日前
オムロン株式会社
非接触給電装置
8日前
オムロン株式会社
転落検知システム
22日前
オムロン株式会社
検査ソケットおよび検査装置
8日前
オムロン株式会社
検査ソケットおよび検査装置
15日前
オムロン株式会社
演出装置及びゲーミングマシン
17日前
オムロン株式会社
表示切替装置および表示システム
3日前
オムロン株式会社
自律作業システム及び自律作業機
25日前
オムロン株式会社
非接触給電装置及び電力伝送方法
8日前
オムロン株式会社
非接触給電装置及び電力伝送用コイル
3日前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
24日前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
3日前
オムロン株式会社
表示切替装置、車両用表示システム及び自動車
10日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
3日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
8日前
オムロン株式会社
図柄変動表示装置、遊技機、および図柄変動表示方法
17日前
オムロン株式会社
作業員割当装置、作業員割当方法および作業員割当プログラム
9日前
国立研究開発法人産業技術総合研究所
振動ユニット及び駆動方法
3日前
オムロン株式会社
車両感知装置、感知信号生成方法、および感知信号生成プログラム
16日前
オムロン株式会社
酸素飽和度測定装置、酸素飽和度測定方法及び酸素飽和度測定プログラム
8日前
オムロン株式会社
電力制御装置、電力制御方法、電力制御プログラム及び電力制御システム
8日前
オムロン株式会社
酸素飽和度測定装置、酸素飽和度測定方法及び酸素飽和度測定プログラム
8日前
国立研究開発法人産業技術総合研究所
振動デバイス、振動ユニット及び振動装置
3日前
オムロン株式会社
旅客流動混雑予測装置、旅客流動混雑予測方法および旅客流動混雑予測プログラム
24日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
21日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
24日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
24日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
24日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
24日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
24日前
オムロン株式会社
俯瞰データ生成装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボット
8日前
オムロン株式会社
俯瞰データ生成装置、学習装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボット
9日前
他の特許を見る



 特許ウォッチ
特許ウォッチ