TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024030680
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2022133724
出願日
2022-08-25
発明の名称
無人走行体
出願人
株式会社豊田自動織機
代理人
主分類
H02J
7/10 20060101AFI20240229BHJP(電力の発電,変換,配電)
要約
【課題】充電直後からの稼働開始を可能とするとともに、充電後のバッテリの電力消費を抑制することが可能な無人走行体の提供にある。
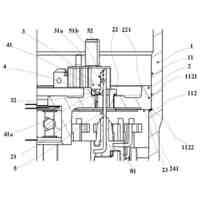
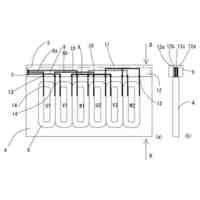
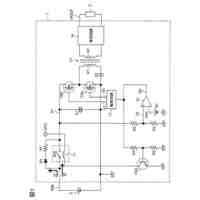
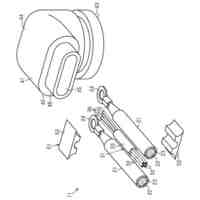
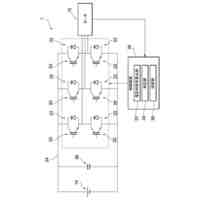
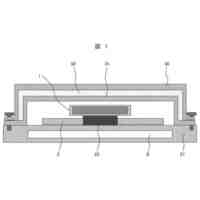
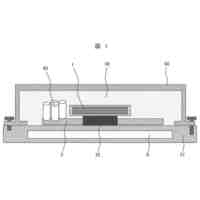
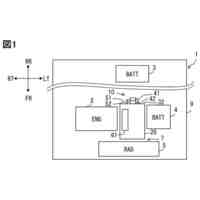
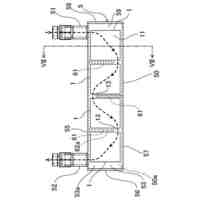
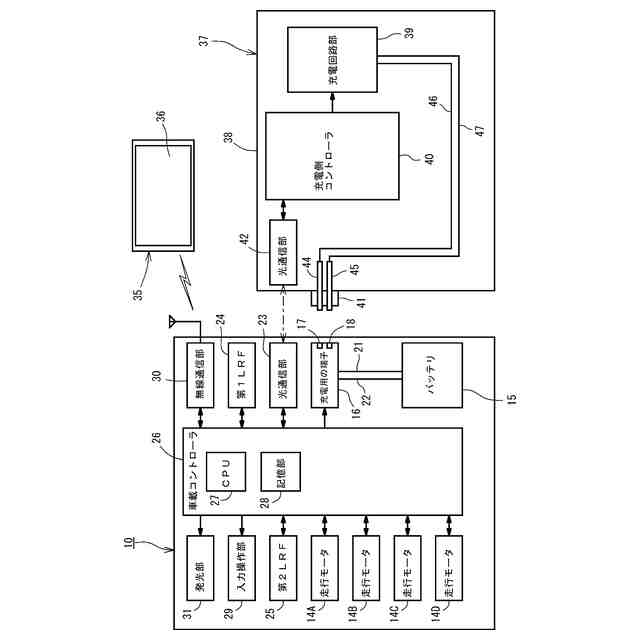
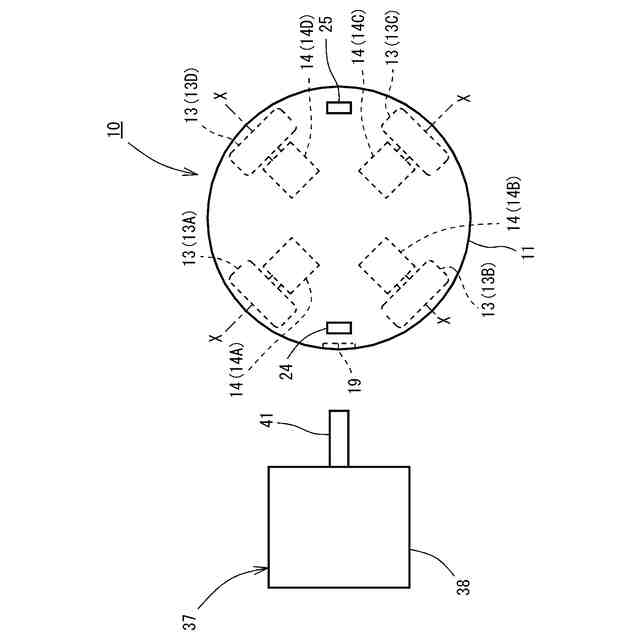
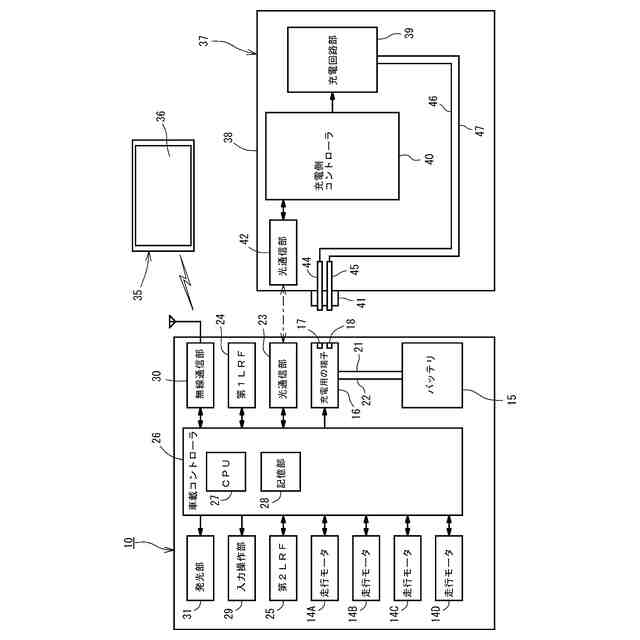
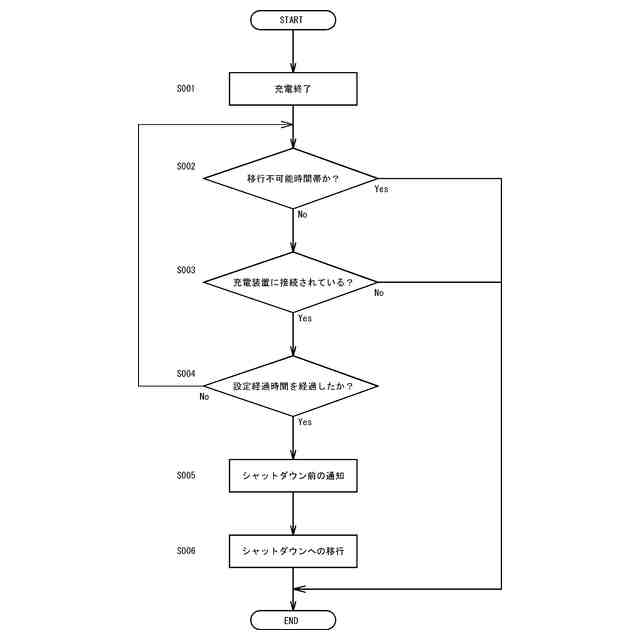
【解決手段】走行体本体と、走行体本体に備えられる複数の駆動輪と、駆動輪毎に備えられ、駆動輪を駆動する走行モータ14と、走行モータを制御するコントローラと、走行体本体に収容される充電可能なバッテリ15と、充電装置37が備える充電端子と接続可能であって、バッテリ15の充電のための充電用の端子16と、を有する無人走行体において、コントローラは、充電端子と充電用の端子16の接続によるバッテリ15の充電後に、予め設定した設定経過時間を経過したとき、走行体本体における各部へ電力供給可能な稼働可能状態から走行体本体における各部への電力供給を停止するシャットダウンに移行するように制御する。
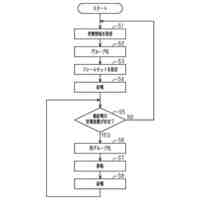
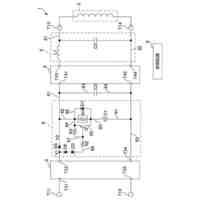
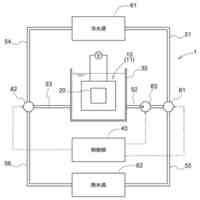
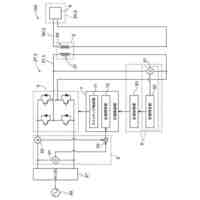
【選択図】 図3
特許請求の範囲
【請求項1】
走行体本体と、
前記走行体本体に備えられる駆動輪と、
前記駆動輪を駆動する走行モータと、
前記走行モータを制御するコントローラと、
前記走行体本体に収容される充電可能なバッテリと、
充電装置が備える充電端子と接続可能であって、前記バッテリの充電のための充電用の端子と、を有する無人走行体において、
前記コントローラは、前記充電端子と前記充電用の端子の接続による前記バッテリの充電後に、予め設定した設定経過時間を経過したとき、前記走行体本体における各部へ電力供給可能な稼働可能状態から前記走行体本体における各部への電力供給を停止するシャットダウン又はスタンバイ状態に移行するように制御することを特徴とする無人走行体。
続きを表示(約 590 文字)
【請求項2】
前記走行体本体は報知器を備え、
前記コントローラは、シャットダウン又はスタンバイ状態へ移行する前であることを周囲に報知するように前記報知器を制御することを特徴とする請求項1記載の無人走行体。
【請求項3】
シャットダウン又はスタンバイ状態への移行を不能とする移行不能時間帯が予め設定され、
前記コントローラは、前記移行不能時間帯ではシャットダウン又はスタンバイ状態へ移行しないように制御することを特徴とする請求項1又は2記載の無人走行体。
【請求項4】
前記コントローラは、
前記バッテリの充電後に前記設定経過時間を経過したとき、前記走行体本体を前記充電装置から離脱させ、
前記走行体本体を前記充電装置から離脱させた後にシャットダウン又はスタンバイ状態に移行するように制御することを特徴とする請求項1又は2記載の無人走行体。
【請求項5】
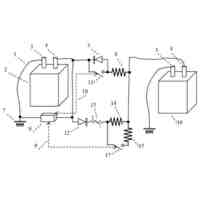
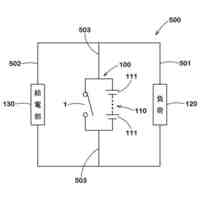
前記充電装置は、
充電回路部と、
前記充電回路部を制御するとともに、前記コントローラと通信可能な充電制御部と、を備え、
前記コントローラは、シャットダウン又はスタンバイ状態に移行する前に、前記充電装置をシャットダウンするように前記充電制御部に信号を伝達することを特徴とする請求項1又は2記載の無人走行体。
発明の詳細な説明
【技術分野】
【0001】
この発明は、無人走行体に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
無人走行体に関係する従来技術としては、例えば、特許文献1に開示された充電制御システムが知られている。特許文献1に開示された充電制御システムは、バッテリを有し、自律走行しながら芝刈り作業を実行する芝刈機と、バッテリを充電する充電ステーションと、を備える。芝刈機は、芝刈機を通常状態から省電力状態に移行させる遷移部を備える。遷移部は、バッテリの充電が完了したときに、芝刈機を通常状態から省電力状態に移行させる。また、遷移部は、遮断期間が経過したときに、芝刈機を省電力状態から通常状態へ遷移させる。なお、「通常状態」とは、芝刈機が芝刈り作業を実行可能な状態を示す。例えば、「通常状態」とは、バッテリから内部電源回路に電力が供給され、且つ、内部電源回路から芝刈機の各部に電力が供給される状態を示す。「省電力状態」とは、「通常状態」と比較して、芝刈機が消費する電力が少ない状態を示す。例えば、「省電力状態」とは、充電ステーションからバッテリに電力が供給されず、且つバッテリから内部電源回路に電力が供給されない状態を示す。この場合には、内部電源回路から芝刈機の各部に電力が供給されない。
【先行技術文献】
【特許文献】
【0003】
国際公開2020/194383号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された充電制御システムの芝刈機では、バッテリの充電が完了したときに、遷移部が芝刈機を通常状態から省電力状態に移行させるため、充電直後に芝刈り作業を開始できないという問題がある。さらに、芝刈機は、遮断期間が経過したときに省電力状態から通常状態へ遷移されるので、芝刈り作業を開始するためには、遷移期間の経過を待たなくてはならない。
【0005】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、充電直後からの稼働開始を可能とするとともに、充電後のバッテリの電力消費を抑制することが可能な無人走行体の提供にある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、走行体本体と、前記走行体本体に備えられる駆動輪と、前記駆動輪を駆動する走行モータと、前記走行モータを制御するコントローラと、前記走行体本体に収容される充電可能なバッテリと、充電装置が備える充電端子と接続可能であって、前記バッテリの充電のための充電用の端子と、を有する無人走行体において、前記コントローラは、前記充電端子と前記充電用の端子の接続による前記バッテリの充電後に、予め設定した設定経過時間を経過したとき、前記走行体本体における各部へ電力供給可能な稼働可能状態から前記走行体本体における各部への電力供給を停止するシャットダウン又はスタンバイ状態に移行するように制御することを特徴とする。
【0007】
本発明では、バッテリの充電後に、予め設定した設定経過時間を経過したとき、無人走行体は、走行体本体における各部へ電力供給可能な稼働可能状態から走行体本体における各部への電力供給を停止するシャットダウン又はスタンバイ状態に移行する。このため、設定経過時間を経過するまでは、無人走行体を直ちに稼働させることができる。また、充電後に設定経過時間が経過すると、シャットダウン又はスタンバイ状態に移行するので、バッテリの電力消費を抑制することができる。
【0008】
また、上記の無人走行体において、前記走行体本体は報知器を備え、前記コントローラは、シャットダウン又はスタンバイ状態へ移行する前であることを周囲に報知するように前記報知器を制御する構成としてもよい。
この場合、コントローラは、シャットダウン又はスタンバイ状態へ移行する前であることを周囲に報知するように報知器を制御するので、無人走行体の近くの作業者は、報知器の報知により無人走行体がシャットダウン又はスタンバイ状態へ移行する前であることを認識できる。
【0009】
また、上記の無人走行体において、シャットダウン又はスタンバイ状態への移行を不能とする移行不能時間帯が予め設定され、前記コントローラは、前記移行不能時間帯ではシャットダウン又はスタンバイ状態へ移行しないように制御する構成としてもよい。
この場合、シャットダウン又はスタンバイ状態への移行を不能とする移行不能時間帯が予め設定されるので、例えば、作業者の都合で、無人走行体をシャットダウン又はスタンバイ状態に移行させたくない時間帯を移行不能時間帯として選択することが可能となる。
【0010】
また、上記の無人走行体において、前記コントローラは、前記バッテリの充電後に前記設定経過時間を経過したとき、前記走行体本体を前記充電装置から離脱させ、前記走行体本体を前記充電装置から離脱させた後にシャットダウン又はスタンバイ状態に移行するように制御する構成としてもよい。
この場合、バッテリの充電後に設定経過時間を経過したとき、走行体本体が充電装置から離脱されるので、シャットダウン又はスタンバイ状態に移行した無人走行体が充電装置を占有することがない。その結果、充電装置は、無人走行体が充電後に離脱することで別の無人走行体の充電を行うことができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
3日前
ニデック株式会社
モータ
18日前
個人
バッテリーの補助装置
11日前
ヨツギ株式会社
鳥害防止具
19日前
個人
磁力のみを動力とするモーター
12日前
株式会社プロテリアル
リニアモータ
19日前
株式会社アイドゥス企画
モータシリンダ
18日前
豊田合成株式会社
送電装置
21日前
日産自動車株式会社
発電装置
11日前
株式会社ミツバ
回転電機
11日前
株式会社ミツバ
回転電機
11日前
オムロン株式会社
電力変換装置
4日前
株式会社ミツバ
制動装置
4日前
ブラザー工業株式会社
制御装置
18日前
ヴィガラクス株式会社
電気供給システム
5日前
住友電装株式会社
ワイヤハーネス
19日前
矢崎総業株式会社
電源装置
20日前
ニチコン株式会社
電源装置
11日前
矢崎総業株式会社
電気接続箱
5日前
富士電機株式会社
半導体モジュール
4日前
個人
超電導ロータリー式発電原動機
4日前
トヨタ紡織株式会社
ロータの製造方法
12日前
トヨタ自動車株式会社
駆動装置
5日前
株式会社日立製作所
電気機器
11日前
株式会社日立製作所
電気機器
11日前
株式会社アイシン
熱電発電装置
19日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
電力変換装置
5日前
大阪瓦斯株式会社
電力調達装置
18日前
株式会社ダイフク
非接触給電設備
5日前
ニデック株式会社
駆動装置
18日前
ボーンズ株式会社
放電回路
11日前
ニデック株式会社
駆動装置
18日前
住友電装株式会社
配線部材
6日前
ダイハツ工業株式会社
グロメット
4日前
株式会社テイエルブイ
発電装置
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ