TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025181045
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024088789
出願日
2024-05-31
発明の名称
打撃工具の補助グリップ
出願人
株式会社マキタ
代理人
弁理士法人岡田国際特許事務所
主分類
B25D
17/04 20060101AFI20251204BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ハンマードリルの補助グリップのコンパクト化を図る。
【解決手段】打撃軸線方向に交差して延出するベース10と、ベース10を覆う把持本体との間に衝撃吸収部20を設ける。把持本体40は、連結軸32を中心にして前後に傾動可能に連結されている。衝撃吸収部20は、共通の弾性体21を有する。把持本体40は共通の弾性体21により打撃軸線P方向の一方及び他方の両方向に付勢可能な状態でベース10に保持される。これにより把持本体40がベース10に対して初期位置に保持される。作業者が把持本体40を前方へ押して弾性体21が後プッシャ24で圧縮された状態で工具本体が打撃動作することで衝撃が吸収される。
【選択図】図5
特許請求の範囲
【請求項1】
打撃工具の補助グリップであって、
前記打撃工具の打撃軸線方向に交差して延出するベースと、
前記ベースを覆う把持本体を有し、
前記ベースに保持された共通の弾性体により前記把持本体が前記打撃軸線方向の一方及び他方の両方向に付勢可能な状態で前記ベースに保持される補助グリップ。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の補助グリップであって、
前記ベースは、前記打撃工具の工具本体に取り付けられる基部と、前記把持本体が前記打撃軸線方向に傾動可能に連結される先端部を有し、前記基部に前記弾性体が配置され、前記弾性体から離間した前記先端部に前記把持本体が連結される連結部を有する補助グリップ。
【請求項3】
請求項1又は2記載の補助グリップであって、
前記弾性体は、前記ベースに対して前記ベースの延出方向に交差する上下方向にずれて配置され、且つ前記ベースに対して前記上下方向で少なくとも一部がオーバーラップして配置されている補助グリップ。
【請求項4】
請求項1~3の何れか1つに記載の補助グリップであって、
前記弾性体は、前記ベースの第1側に配置される第1弾性体と、前記ベースの前記第1側と反対側の第2側に配置される第2弾性体を含む補助グリップ。
【請求項5】
請求項1~4の何れか1つに記載の補助グリップであって、
前記弾性体は、前記ベースに設けた保持部に前記弾性体の付勢力により保持される補助グリップ。
【請求項6】
請求項1~5に何れか1つに記載の補助グリップであって、
一端が前記弾性体に当接され、他端が前記把持本体の内面に当接されるプッシャを有する補助グリップ。
【請求項7】
請求項6に記載の補助グリップであって、
前記プッシャは、前記弾性体の前部に当接される前プッシャと、前記弾性体の後部に当接される後プッシャを含む補助グリップ。
【請求項8】
請求項6又は7に記載の補助グリップであって、
前記ベースは、前記弾性体と前記プッシャを保持する保持部を有し、
前記保持部は、前記プッシャの前記打撃軸線方向への移動を規制する部位を有する補助グリップ。
【請求項9】
請求項1~8の何れか1つに記載の補助グリップであって、
前記ベースと前記把持本体との間にクッション部材とクリアランスが設けられ、前記把持本体が前記弾性体の弾性力に抗して前記クリアランスを無くすように変位した後、前記把持本体の変位により前記クッション部材が押されて弾性変形する補助グリップ。
【請求項10】
請求項9記載の補助グリップであって、
前記クッション部材は、前記打撃軸線方向に直交する方向について前記把持本体と前記ベースとの間で常時押されて変形した状態で介在される補助グリップ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えばハンマードリルと称される打撃工具に用いる補助グリップに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示されているようにハンマードリルと称される打撃工具は、作業者が一方の手で把持するメインハンドルと他方の手で把持する補助グリップを備える。作業者は両手で打撃工具を把持して、例えばコンクリート壁の穴明け作業やコンクリート床のハツリ作業を行う。このため、例えば補助グリップには工具本体側の打撃動作による衝撃を吸収のための衝撃吸収部が設けられている。
【先行技術文献】
【特許文献】
【0003】
米国特許第9242363号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の補助グリップでは、工具本体に結合されるグリップベースとの間にスポンジ等のクッション部材を介在させて作業者の手に付加される衝撃を低減させる構成となっている。しかしながら、従来クッション部材として圧縮ばねを直列に配置する構成とした場合に衝撃吸収部が大型化する問題があった。本開示では、補助グリップの衝撃吸収部のコンパクト化を図ることを目的とする。
【課題を解決するための手段】
【0005】
本開示の1つの局面によれば、打撃工具の補助グリップは、打撃工具の打撃軸線方向に交差して延出するベースと、ベースを覆う把持本体を有する。ベースに保持された共通の弾性体により把持本体が打撃軸線方向の一方及び他方の両方向に付勢可能な状態でベースに保持される。
【0006】
従って、共通の弾性体により把持本体が打撃軸線方向の一方及び他方の両方向に付勢可能に保持されることで補助グリップのコンパクト化が図られる。
【0007】
本開示の他の局面によれば、打撃工具は上記1つの局面に係る補助グリップを有する。従って打撃工具における補助グリップのコンパクト化が図られる。
【図面の簡単な説明】
【0008】
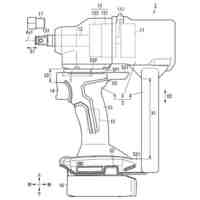
打撃工具の縦断面図である。本図では補助グリップが下方へ延びる向きに装着された状態を示している。
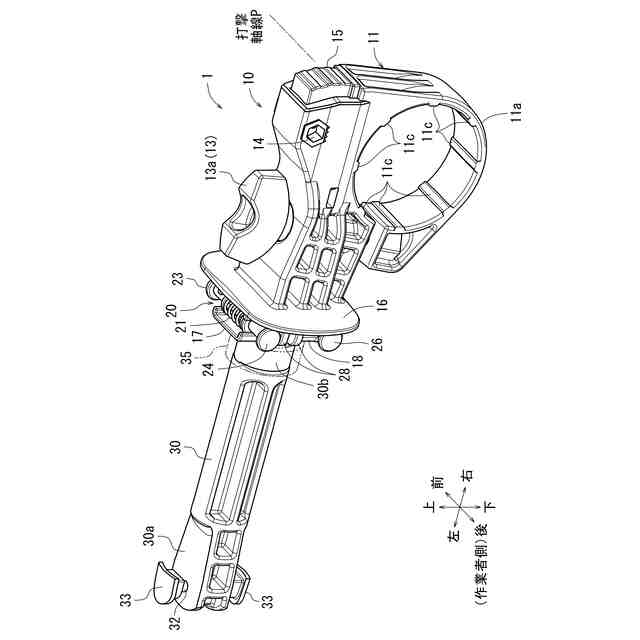
補助グリップの全体斜視図である。本図は打撃工具から取り外した状態で右斜め後方から見た状態を示している。図1とは異なって図2~図10では補助グリップは打撃工具から左方へ延びる通常の横姿勢で示されている。
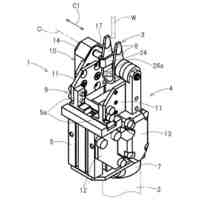
補助グリップの斜視図である。本図は左斜め後方かつ斜め上方から見た状態を示している。
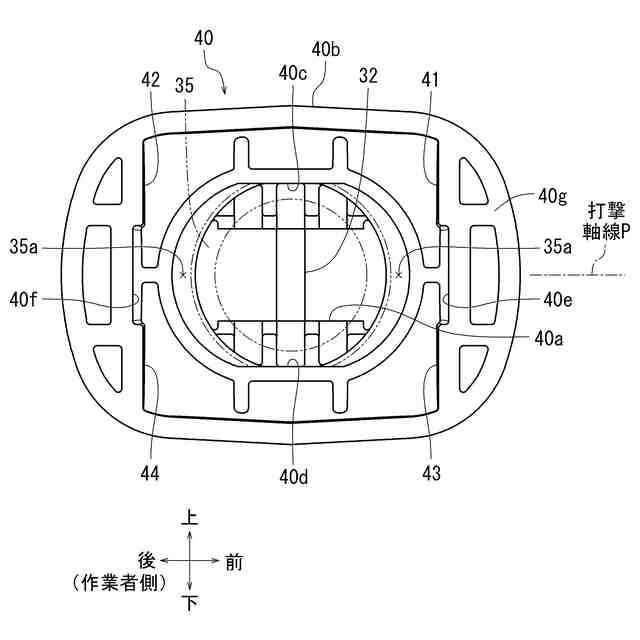
補助グリップの上面図である。
補助グリップのベースの上面図である。本図は把持本体が横断面で示されている。
ベースの斜視図である。本図は、左斜め後方かつ斜め上方から見た状態を示している。
ベースの衝撃吸収部の斜視図である。本図は、右斜め後方から見た状態を示している。
図5中VIII-VIII線断面矢視図である。本図は、衝撃吸収部の縦断面を示している。
把持本体の右側面図である。
把持本体の斜視図である。本図は、左斜め後方から見た状態を示している。
補助グリップの上面図である。本図は、補助グリップを工具本体の左側に取り付けた左側横姿勢を示している。
補助グリップの上面図である。本図は、補助グリップを工具本体の右側に取り付けた右側横姿勢を示している。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施形態によれば、ベースは、打撃工具の工具本体に取り付けられる基部と、把持本体が打撃軸線方向に傾動可能に連結される先端部を有する。基部に弾性体が配置され、弾性体から離間した先端部に把持本体が連結される連結部を有する。従って、工具本体に近い部位に弾性体が配置され、工具本体から遠い部位に連結部が配置されることで工具本体の打撃動作に伴う衝撃が効率良く吸収される。
【0010】
1つ又はそれ以上の実施形態によれば、弾性体は、ベースに対してベースの延出方向に交差する上下方向にずれて配置され、且つベースに対して上下方向で少なくとも一部がオーバーラップして配置されている。従って、補助グリップの打撃軸線方向のコンパクト性が確保される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
電動作業機
2日前
株式会社マキタ
レシプロソー
1日前
株式会社マキタ
集塵アタッチメント
14日前
株式会社マキタ
打撃工具の補助グリップ
1日前
株式会社マキタ
減衰部材、清掃装置、及び吸込ヘッド
1日前
株式会社マキタ
携帯用加工機のカバー及び携帯用加工機
1日前
株式会社マキタ
往復動工具、及び、往復動工具の電動モータを制御する方法
7日前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータを制御する方法
7日前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータの通電を保持する方法
7日前
株式会社マキタ
ベルトサンダの作業部構造、ベルトサンダのアタッチメント及びベルトサンダ
1日前
株式会社マキタ
往復動工具、及び、往復動工具における往復部材の位置検出に関連する不具合の発生を検出する方法
7日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
CKD株式会社
把持装置
7日前
トヨタ自動車株式会社
学習装置
22日前
ダイセイ株式会社
ロボット自動刻印装置
7日前
川崎重工業株式会社
ハンド
2か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
15日前
工機ホールディングス株式会社
作業機
2か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
株式会社やまびこ
電動作業機
1日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
14日前
株式会社不二越
垂直多関節ロボット
22日前
新電元工業株式会社
インピーダンス制御装置
1日前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
株式会社マキタ
現場用作業機
1か月前
パナソニック株式会社
工具
1日前
住友重機械工業株式会社
ロボット教示装置
2日前
NTN株式会社
把持装置
7日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ