TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025178150
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2025080020
出願日
2025-05-12
発明の名称
仮想的なマークを使用して車両の自動制御を移転するシステム及び方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
50/14 20200101AFI20251128BHJP(車両一般)
要約
【課題】仮想的なマークのエミュレート及びバッファゾーンの推定を通じて車両の自動制御を移転することに関するシステム及び方法を提供すること。
【解決手段】一実施形態では、方法は、運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定することを含む。方法はまた、移行時間、及び操作者によるテークオーバに関する位置から自動領域を予測することを含む。方法はまた、自動領域及び位置を使用して、テークオーバに関する仮想的なマークを生成することを含み、仮想的なマークは、自動領域内に存在し、位置は、車両に対する手動フィードバックに関するエリアを示す。
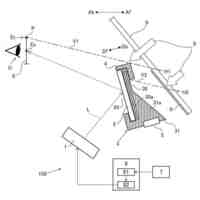
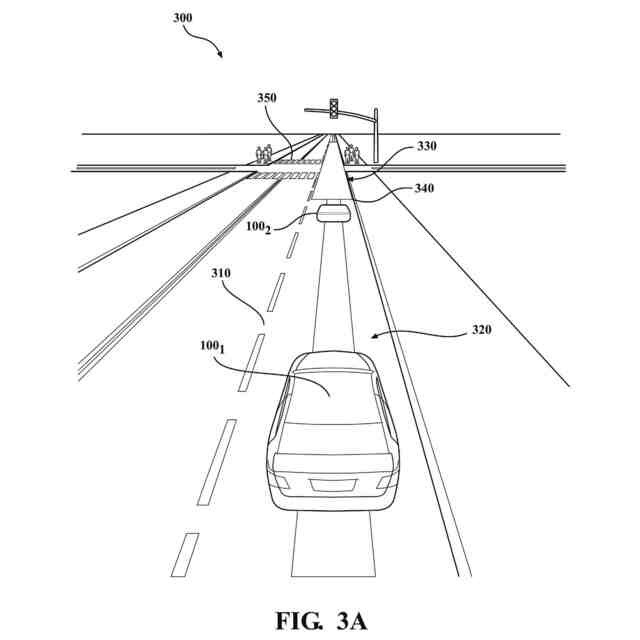
【選択図】図3A
特許請求の範囲
【請求項1】
命令を記憶するメモリを備える推定システムであって、
前記命令は、プロセッサによって実行されると、前記プロセッサに対して、
運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定させ、
移行時間、及び操作者による前記テークオーバに関する前記位置から自動領域を予測させ、
前記自動領域及び前記位置を使用して、前記テークオーバに関する仮想的なマークを生成させ、前記仮想的なマークは、前記自動領域内に存在し、前記位置は、前記車両に対する手動フィードバックに関するエリアを示す、推定システム。
続きを表示(約 1,300 文字)
【請求項2】
前記移行時間中における前記操作者による前記車両の前記テークオーバ及び手動制御が不充分であると、自動運転モジュールによって前記車両を自動的に停止させる命令を更に含む、請求項1に記載の推定システム。
【請求項3】
前記仮想的なマークを生成する前記命令は、
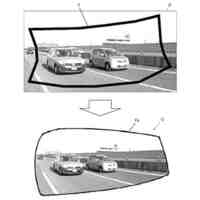
前記車両の周囲のシーンを増強する画像の重畳を通じてヘッドアップディスプレイ(HUD)に前記仮想的なマークを表示する命令を更に含み、前記仮想的なマークは、前記シーン内の道路における注意ゾーンをエミュレートする、請求項1に記載の推定システム。
【請求項4】
前記位置をマップデータと比較し、前記車両が前記自動領域を超えて前記運転操縦を自律的に制御することができず、前記操作者が前記テークオーバをすることが可能であることを示すことによって、前記テークオーバを予定し、
前記移行時間中に前記車両及び前記操作者間で制御を共有する命令を更に含み、前記移行時間中に、前記操作者は、1次コマンドを入力し、前記車両は、2次コマンドで支援する、請求項3に記載の推定システム。
【請求項5】
前記注意ゾーン内のポイントに対応して車両要素を構成要素によって振動させる命令を更に含み、前記構成要素は、電磁サスペンション及び触覚モータのうちの1つであって、前記車両要素は、シートベース、ホルスタ、シャーシ、及びステアリングホイールのうちの1つである、請求項3に記載の推定システム。
【請求項6】
前記移行時間は、前記エリア内で前記車両を自律的に制御するための自動化レベル及び前記自動化レベルの能力に従って予め定められ、
前記自動領域は、前記自動化レベルに従って色分けされる、請求項5に記載の推定システム。
【請求項7】
前記エリアに関連付けられる地理の変化に従って前記位置を計画する命令を更に含み、前記地理は、高速エリアからローカルエリアに変化する、請求項1に記載の推定システム。
【請求項8】
前記移行時間は、センサデータから導出される前記操作者の注意深さ、前記車両の停止距離、及び前記運転操縦に関連付けられる自動化レベルを要因に入れる、請求項1に記載の推定システム。
【請求項9】
前記自動領域を予測する前記命令は、前記位置に向かう前記車両の速度を要因に入れる命令を更に含む、請求項1に記載の推定システム。
【請求項10】
命令を含む非一時的コンピュータ可読媒体であって、
前記命令は、プロセッサによって実行されると、前記プロセッサに対して、
運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定させ、
移行時間、及び操作者による前記テークオーバに関する前記位置から自動領域を予測させ、
前記自動領域及び前記位置を使用して、前記テークオーバに関する仮想的なマークを生成させ、前記仮想的なマークは、前記自動領域内に存在し、前記位置は、前記車両に対する手動フィードバックに関するエリアを示す、非一時的コンピュータ可読媒体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書に記載される主題は概して、自動制御を操作者に移転することに関し、より具体的には、仮想的なマーク及びバッファゾーンを使用して車両の自動制御を移転することに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
システムは、自動システムから操作者に車両制御を移転することを含む自動車両のテークオーバを調整する。一手法では、システムは、カメラ、光検出及び測距(LiDAR)、レーダ、超音波センサなどからのセンサデータを使用して車両の周囲を知覚する。例えば、車両は、光を使用して周囲環境をスキャンする光検出及び測距(LIDAR)センサを備え得る一方、LIDARに関連付けられるロジックは、取得データを分析して周囲環境のオブジェクト及び他の特徴の存在を検出する。更なる例では、カメラなどの追加の/代替的なセンサは、システムが周囲環境の態様に関する認識を導出する周囲環境に関する情報を取得するために実装され得る。知覚は、潜在的な危険に関する環境、障害物、及び自動システムが安全にナビゲートすることが困難であると分かり得る状況を監視することを含み得る。システムはまた、潜在的な危険のリスクレベルを評価し、データ品質に応じて、操作者への制御の移転が安全であるかどうかを決定し得る。介入が警告を通じて衝突リスクを軽減し得るとき、システムは、操作者に通知する。それにも関わらず、データが不正確であって警告のタイミングが悪いとき、リスクレベルを評価し警告を生成するシステムは、安全性に影響を与え得る。
【0003】
様々な実装態様では、システムは、センサデータを使用して状況のリスクについて環境を監視するのではなく、テークオーバを計画する。例えば、車両に関する自動システムは、ハイウェイ環境内の状況に関する能力を有する。したがって、自動システムは、ハイウェイ環境の外側にあるとき、操作者へのテークオーバを予定するように他のシステムと共に調整する。しかしながら、計画されるシステム調整テークオーバは、制御を淑やかに切り替えるように、操作者に準備させデータ利用可能性から閾値を計算する困難に遭遇する。したがって、自動車両に関するシステム管理テークオーバは、状況及び計画の分析からの安全性及び適時性に関する課題に直面する。
【発明の概要】
【0004】
一実施形態では、例示的なシステム及び方法は、推定される仮想的なマーク及びバッファゾーンを使用して車両の自動制御を移転することに関する。様々な実装態様では、自動車両は、製造者によって設定される動作閾値を有する。動作閾値は、シナリオが車両の能力及び機器に対して過度に複雑であるような状況のものであり得る。他の閾値は、例えば、視認性が乏しい間における動作、悪天候などの状態である。システムは、自動レベルからのテークオーバなどの自動車両の制御を変更する必要性を評価するとき、動作閾値を考慮する。ここで、テークオーバは、自動車両が、自動システムから操作者に車両制御(例えば、操縦、ブレーキ、加速など)を移転するときであり得る。システムが予測及び調整するテークオーバは、操作者が運転環境に関して不充分な注意深さであって移行警告(例えば、可聴警報)を無視することなどの、テークオーバに関連付けられる制御の移転からの問題に直面する。
【0005】
したがって、一実施形態では、推定システムは、自動運転に関する終点を予測し、手動コマンドを含む状態へのテークオーバに関して仮想的なマークを使用して操作者を支援する。ここで、自動領域は、現在の位置と終点との間で地理的に存在し得る。車両が、予測を通じて既知である終点を超える状態に移行する(例えば、マッピングゾーンを離れる)と、推定システムは、移行時間の前に仮想的なマーク及びフィードバックを用いて操作者にテークオーバを知らせる。特に、移行時間は、操作者からの手動制御が求められる移行に関するバッファゾーンとして機能し得る。例えば、ヘッドアップディスプレイは、自動領域内で注意ゾーンとして仮想的なマークを出力する。更に、推定システムは、注意ゾーン内のポイントにおける仮想的なマークに関連付けられる物理的な効果(例えば、可聴警報、振動する構成要素)をエミュレートする。一手法では、推定システムは、移行時間中における操作者による車両のテークオーバ及び手動制御が不充分であると、車両を自動的に停止させる。したがって、推定システムは、終点を予測し道路マークを仮想的にエミュレートすることによってテークオーバについて操作者に準備させ、それによって、自動運転に関連付けられる快適性及び安全性を改善する。
【0006】
一実施形態では、仮想的なマークのエミュレート及びバッファゾーンの推定を通じて車両の自動制御を移転する推定システムが開示される。推定システムは、命令を記憶するメモリを含み、当該命令は、プロセッサによって実行されると、プロセッサに対して、運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定させる。命令はまた、移行時間、及び操作者によるテークオーバに関する位置から自動領域を予測する命令を含む。命令はまた、自動領域及び位置を使用して、テークオーバに関する仮想的なマークを生成する命令を含み、仮想的なマークは、自動領域内に存在し、位置は、車両に対する手動フィードバックに関するエリアを示す。
【0007】
一実施形態では、仮想的なマークのエミュレート及びバッファゾーンの推定を通じて車両の自動制御を移転し、プロセッサによって実行されるとプロセッサに対して1つ以上の機能を行わせる命令を含む、非一時的コンピュータ可読媒体が開示される。命令は、運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定する命令を含む。命令はまた、移行時間、及び操作者によるテークオーバに関する位置から自動領域を予測する命令を含む。命令は、自動領域及び位置を使用して、テークオーバに関する仮想的なマークを生成する命令を含み、仮想的なマークは、自動領域内に存在し、位置は、車両に対する手動フィードバックに関するエリアを示す。
【0008】
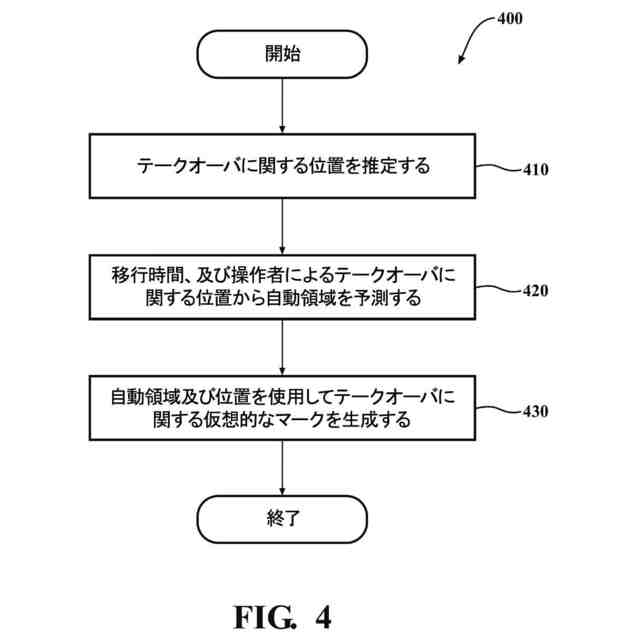
一実施形態では、仮想的なマークのエミュレート及びバッファゾーンの推定を通じて車両の自動制御を移転する方法が開示される。一実施形態では、方法は、運転操縦を直接的に制御している車両によるテークオーバに関する位置を推定することを含む。方法はまた、移行時間、及び操作者によるテークオーバに関する位置から自動領域を予測することを含む。方法はまた、自動領域及び位置を使用して、テークオーバに関する仮想的なマークを生成することを含み、仮想的なマークは、自動領域内に存在し、位置は、車両に対する手動フィードバックに関するエリアを示す。
【図面の簡単な説明】
【0009】
本明細書の一部において援用され本明細書の一部を構成する添付図面は、本開示の様々なシステム、方法、及び他の実施形態を示す。図において示される要素の境界(例えば、ボックス、ボックスのグループ、又は他の形状)は、境界の一実施形態を表すことが理解されるであろう。一部の実施形態では、1つの要素は、複数の要素として設計されてもよく、又は複数の要素は、1つの要素として設計されてもよい。一部の実施形態では、別の要素の内部構成要素として示される要素は、外部構成要素として実装されてもよく、逆もまた同様である。更に、要素は、縮尺通りに描かれていない場合がある。
【0010】
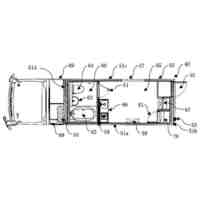
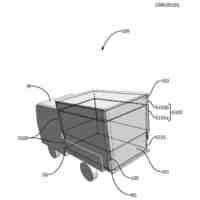
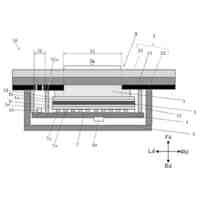
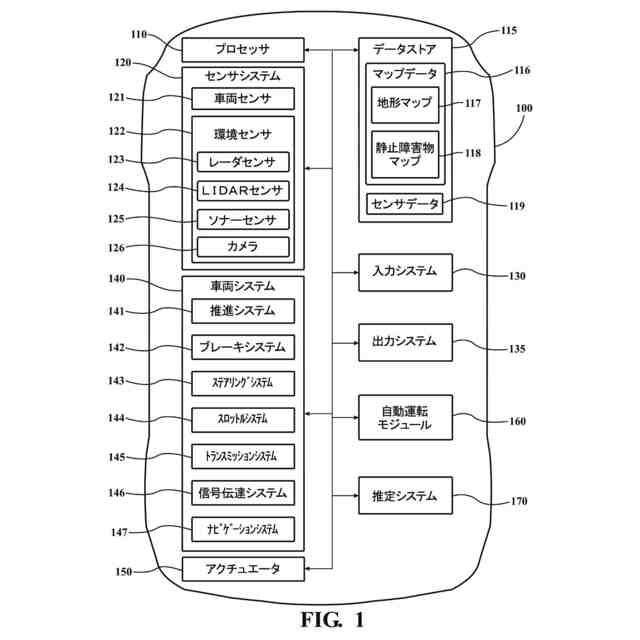
本明細書に開示されるシステム及び方法が実装され得る車両の一実施形態を示す図である。
推定される仮想的なマーク及びバッファゾーンを使用して車両の自動制御を移転することに関連付けられる推定システムの一実施形態を示す図である。
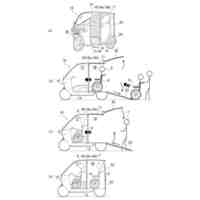
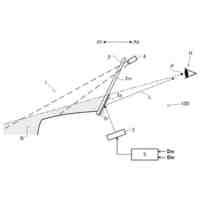
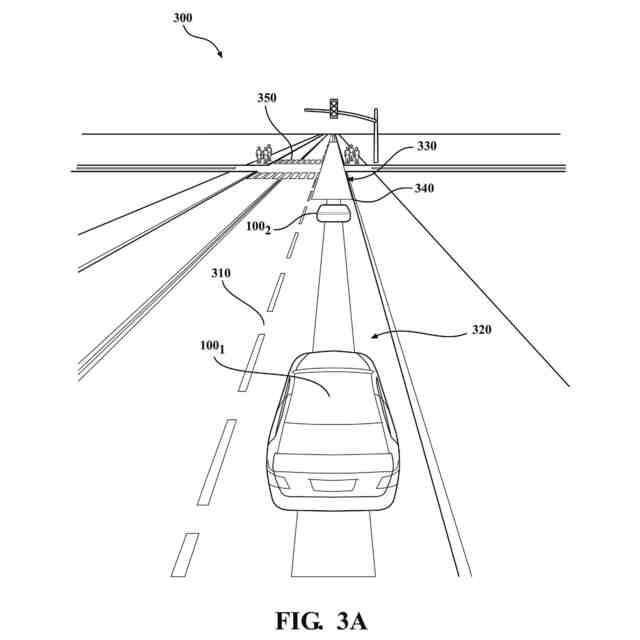
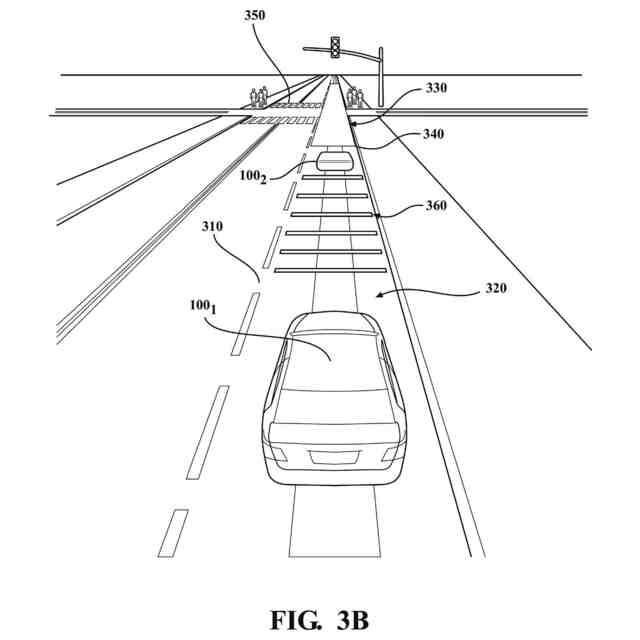
テークオーバに関する仮想的なマークを生成する図2の推定システムの一実施形態、並びに自動領域及び位置を含む図を示す図である。
テークオーバに関する仮想的なマークを生成する図2の推定システムの一実施形態、並びに自動領域及び位置を含む図を示す図である。
移行時間、及び操作者のテークオーバに関する位置から車両に関する自動領域を予測することに関連付けられる方法の一実施形態を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
タイヤ脱落防止構造
3か月前
個人
ホイルのボルト締結
5か月前
個人
ルーフ付きトライク
4か月前
個人
空間形成装置
1か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
1か月前
個人
車両通過構造物
4か月前
個人
常設収納型サンバイザー
1か月前
個人
乗合路線バスの客室装置
4か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社ニフコ
照明装置
3か月前
個人
回転窓ワイパー装置
1か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
1か月前
株式会社ニフコ
保持装置
5か月前
日本精機株式会社
車室演出装置
3か月前
日本精機株式会社
車載表示装置
1か月前
株式会社豊田自動織機
産業車両
4か月前
日本精機株式会社
車載表示装置
2か月前
株式会社ニフコ
収納装置
2か月前
日本精機株式会社
画像投映装置
2か月前
個人
音声ガイド、音声サービス
4か月前
個人
車載小物入れ兼雨傘収納具
5か月前
個人
円湾曲ホイール及び球体輪
4か月前
日本精機株式会社
車両用表示装置
4か月前
極東開発工業株式会社
車両
4か月前
日本精機株式会社
車両用報知装置
1か月前
個人
聴覚と触覚を利用する速度計
1日前
日本精機株式会社
車両用投影装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ